Wir haben einen Testbericht zum Runner in der Zeitschrift ROTOR veröffentlicht. Jetzt präsentieren wir euch unser Bericht auch hier.


Hinweis: Dies ist der Originaltext aus der Zeitschrift, die im Oktober 2015 erschienen ist. Mittlerweile hat sich beim Runner so einiges getan. Einige Probleme wurden gelöst, z.B. das LVC, und es sind neue Modellvarianten erschienen. Für aktuelle Infos zum Runner könnt ihr die Runner Kategorie oder unser Forum durchstöbern.
Inhalt
Einleitung
Walkera gibt es seit nunmehr 21 Jahren. In der langen Firmengeschichte hat Walkera verschiedenste Flugmodelle hergestellt. Mit flugfertigen (RTF) Modellhubschraubern begann eine Serie von Erfolgen. Besonders populär waren die Mini Hubschrauber bis zur 200er Klasse, die im Laufe einer langen Evolution perfektioniert wurden. Den vermutlich größten Erfolg hat Walkera aber mit dem kleinen Quadrokopter Ladybird gefeiert. Das war der erste kleine agile Quadrokopter, der robust, bezahlbar und flugfertig war. Danach folgten diverse GPS Kopter Modelle wie der bekannte X350 Pro, Tali H500, Scout X4, X800, Voyager 3 und andere. Die Helikoptersparte wurde eingestellt.
Auf GPS-Flug ausgelegte Modelle erfüllen vordergründig den Zweck des Filmens. Für Piloten, die Geschwindigkeit und Adrenalin suchen, bieten sie aufgrund ihrer Optimierung auf Kameraflug “out of the box” allerdings prinzipbedingt nicht immer das gewünschte Flugerlebnis.
Mit dem Runner 250 kommt von Walkera nach der längeren “GPS Phase” wieder ein Modell, das allein dem Spaß und Sport dient. Der erste flugfertige 250er Racer in Massenproduktion für Jedermann von Walkera. Kein GPS, nur freier Himmel und du. Wird ja auch mal wieder Zeit zu zeigen, dass Kopter mehr sind als viel zu lauter Blimp-Ersatz!

 Der Walkera Runner 250 ist der erste Race-Kopter, der als RTF-Set verfügbar ist – und das zu einem recht günstigen Preis.
Der Walkera Runner 250 ist der erste Race-Kopter, der als RTF-Set verfügbar ist – und das zu einem recht günstigen Preis.
Die Konstruktion des Walkera Runner 250 orientiert sich konzeptionell an bekannten Vertretern der 250er Race Kopter Klasse, wie etwa dem Blackout Mini H Quad oder dem EMax Nighthawk 250. Der Kopter ist aus Kohlefaser-Glasfaser Schicht-Verbundstoff gefertigt und ist in offener Bauweise gehalten, sodass alle Komponenten leicht zugänglich sind.

Das Design für den Runner ist eine Eigenentwicklung von Walkera, die sich an bewährten Bauformen für Racer orientiert.
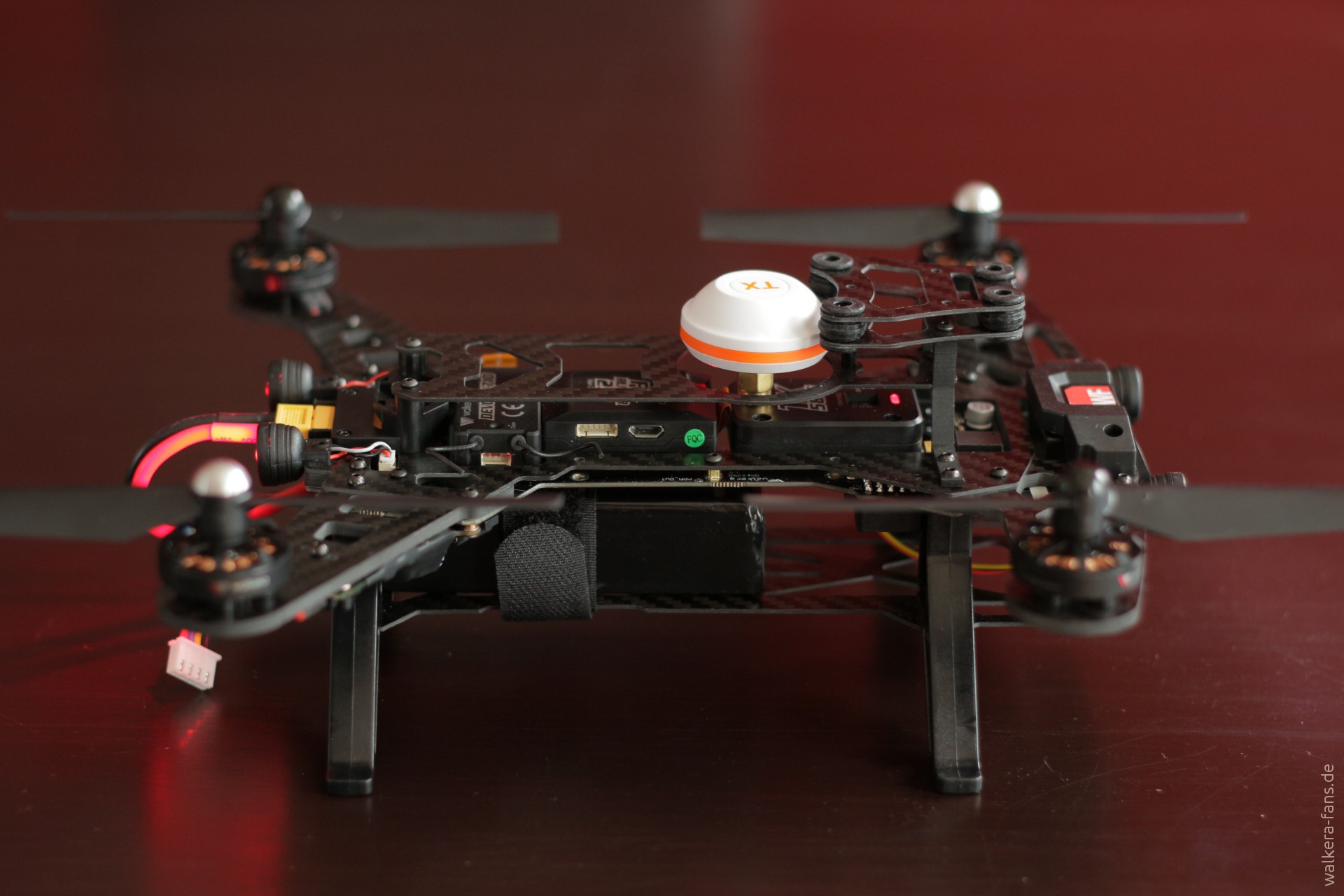

Eine Stromverteilerplatine trägt die komplette Elektronik. Die FPV Kamera sitzt zentral unter dieser Platine an der Front. Der Akku wird in dem Raum zwischen der Hauptplatine und einer Faserverbundplatte darunter befestigt. Die stabilen Landebeine sind gleichzeitig die Abstandhalter zwischen den beiden Platten. Die Motoren befinden sich auf Auslegern, die als Verlängerungen der Hauptplatine konstruiert sind und die Motorregler an der Unterseite tragen. Zur Orientierung dienen exponierte wattstarke LEDs, die vorne weiß und hinten rot mit einer Helligkeit leuchten, durch die sie auch bei starkem Sonnenlicht noch gut zu erkennen sind.

Die LEDs.
Jeder Kopterpilot weiß, dass gelegentliche Abstürze ganz normal sind. Als RTF Modell ist der Runner 250 bereits jetzt weit verbreitet, also ist es recht einfach, Ersatzteile zu bekommen, die relativ günstig ausfallen. Ein Vorteil speziell des Runner 250 ist seine Modularität. Nahezu jedes Bauteil lässt sich schnell auswechseln. Überall wurden Steckverbindungen verwendet. Es gibt kein Problem mit dem Kabelmanagement, wie bei vielen Eigenbauten. Die meisten Verbindungen sind ohne Kabel gelöst. Motoren sind mit kurzen Kabeln mittels 2mm Goldkontaktsteckern mit den Reglern verbunden. Die Farben sind beschriftet, damit die Drehrichtung der Motoren immer auf Anhieb stimmt. Die Regler sind mit Schrauben fixiert und besitzen steckbare Stromanschlüsse wie bei einer Laptopbatterie. Kamera, FPV Sender, OSD Modul, Empfänger, Flugsteuerung und LEDs sind jeweils mit Steckern verbunden. Der Clou: Sogar in der Hektik eines FPV Race Events sollte der Austausch der Komponenten leicht von der Hand gehen. Die Propeller sind selbstsichernd und dadurch ebenfalls besonders schnell zu montieren. Außerdem ist das Design fast ohne sichtbare Kabelverbindungen sehr ansprechend und noch recht selten. Bislang kommt etwas ähnliches nur beim TBS Gemini vor.

Für Flugaufzeichnungen mit Race-Koptern haben sich die Mobius-Kameras bewährt. Diese sind leicht und bieten dennoch eine ordentliche Bildqualität.
Die Motoren haben 2500 Kv (Umdrehungen pro Minute pro Volt), was dem Standard für diese Kopterklasse entspricht. Sie können durch die Regler mit bis zu 20 A versorgt werden.
Die Propeller messen 140mm und liegen im Durchmesser somit zwischen den bekannten 5 und 6 Zoll Propellern. Das Besondere an ihnen: Ihre Breite wird am äußeren Rand nicht geringer und ihre Steigung bleibt über die ganze Fläche nahezu konstant.

Die selbstsichernden Propeller liefern an den 2.500 kV Brushless-Motoren viel Schub – trotz ihrer geringen Größe.
Die in ihrem Neigungswinkel einstellbare und durch seitlich angebrachte Schrauben arretierbare FPV Kamera liefert das Bild mit 800 TVL und wird mit 12V betrieben. Die Kamera ist das einzige Bauteil, welches mit einem langen, freiliegenden Kabel verbunden wird. Das Objektiv ist sehr lichtstark, was fliegen bei Dämmerung möglich macht. Auf der Oberseite des Kopters befindet sich eine mit Antivibrationsgummis versehene Platte, auf der eine Mobius oder eine GoPro Kamera Platz findet. Da die eingebaute FPV Kamera auf schnelle Bildübertragung optimiert ist, fehlt hier die Aufzeichnungsfunktion. Dazu eignen sich die oben genannten Kameras erfahrungsgemäß sehr gut.

Die Kamera lässt sich neigen und kann dem Flugstil des Piloten angepasst werden. Für besonders schnelle Flüge erlaubt sie genügend Neigung nach oben.


Es gibt ein in manchen Paketen enthaltenes OSD Modul, das auf der Unterseite des Kopters gesteckt wird und diverse Daten ins Videobild projiziert. Die aktuelle OSD Einstellung benötigt GPS, da die meisten Daten nur mit GPS zu ermitteln sind. Wenn keine GPS Antenne am Kopter angeschlossen ist, werden trotzdem alle Werte des OSD angezeigt, wodurch der Pilot lauter Nullen sieht. Ein GPS-Modul zum Nachrüsten wurde bis jetzt noch nicht angekündigt. Ohne dieses ist das OSD mit den ganzen Daten derzeit aus unserer Sicht nicht sinnvoll. Lediglich die Akkuspannung ist für den Piloten hilfreich. Ein lautstarker LiPo-Wächter löst dieses Problem aber ebenfalls. Des weiteren fällt der künstliche Horizont negativ auf. Er arbeitet recht langsam und neigt sich in die falsche Richtung.

Das OSD liefert ohne GPS kaum sinnvolle Daten. Außerdem dreht der künstliche Horizont falsch und die Anzeige ist insgesamt sehr träge.
Der 5,8 GHz FPV Transmitter ist ab Werk mit einer linksdrehend zirkulär polarisierten Antenne mit vier Blättern (Cloverleaf) und SMA Anschluss (Antenne mit Pin) ausgestattet. Es gibt den Videosender in zwei Varianten: TX5816 (FCC) und TX5817 (CE), wobei der erstere in Deutschland nicht zugelassen ist und eine Sendeleistung von 250 mW bringt. Die CE Variante bleibt laut Hersteller innerhalb der zulässigen 25 mW.

Der Videotransmitter überträgt ein analoges Videosignal im B‑Band des 5,8‑GHz-Frequenzbereichs. Die Module wie FPV-Sender oder Flugsteuerung sind auf das Power Board gesteckt.
Es ist ein 7‑Kanal Empfänger für die Walkera Devo Sender verbaut. Wenn dieser ausgebaut wird, können die Servoanschlüsse an der Unterseite des Kopters verwendet werden, um einen Empfänger (PWM) eines beliebigen Drittherstellers einzusetzen. Empfänger mit Summensignal werden derzeit nicht unterstützt.
Die Flugsteuerung basiert auf der nicht mehr ganz zeitgemäßen MultiWii 2.2 Firmware. Im Herzen des Kopters schlägt der altbekannte ATmega2560 8‑bit Mikrokontroller. Für die Fluglageerkennung wird der MPU-6050 Sensor eingesetzt. Andere Lagesensoren wie z.B. GPS, Barometer oder Kompass sind nicht verbaut. Die MultiWii Firmware lässt sich mit der Software MultiWiiConf am PC konfigurieren. Firmware-Updates sind über den Port hinten an der Flugsteuerung mittels Walkera UP02 Adapters möglich.

Die Flugsteuerung kann mittels USB mit dem Computer kommunizieren. Per MultiWiiConf lassensich Parameter ändern.
Der mitgelieferte Akku weist mit 2200 mAh und 25C eine für einen Racer recht hohe Kapazität auf. Der Akku wird mit dem standard XT60 Stecker angeschlossen. Viele Akkus sind mit diesem Stecksystem erhältlich und können so ohne Umlöten verwendet werden.
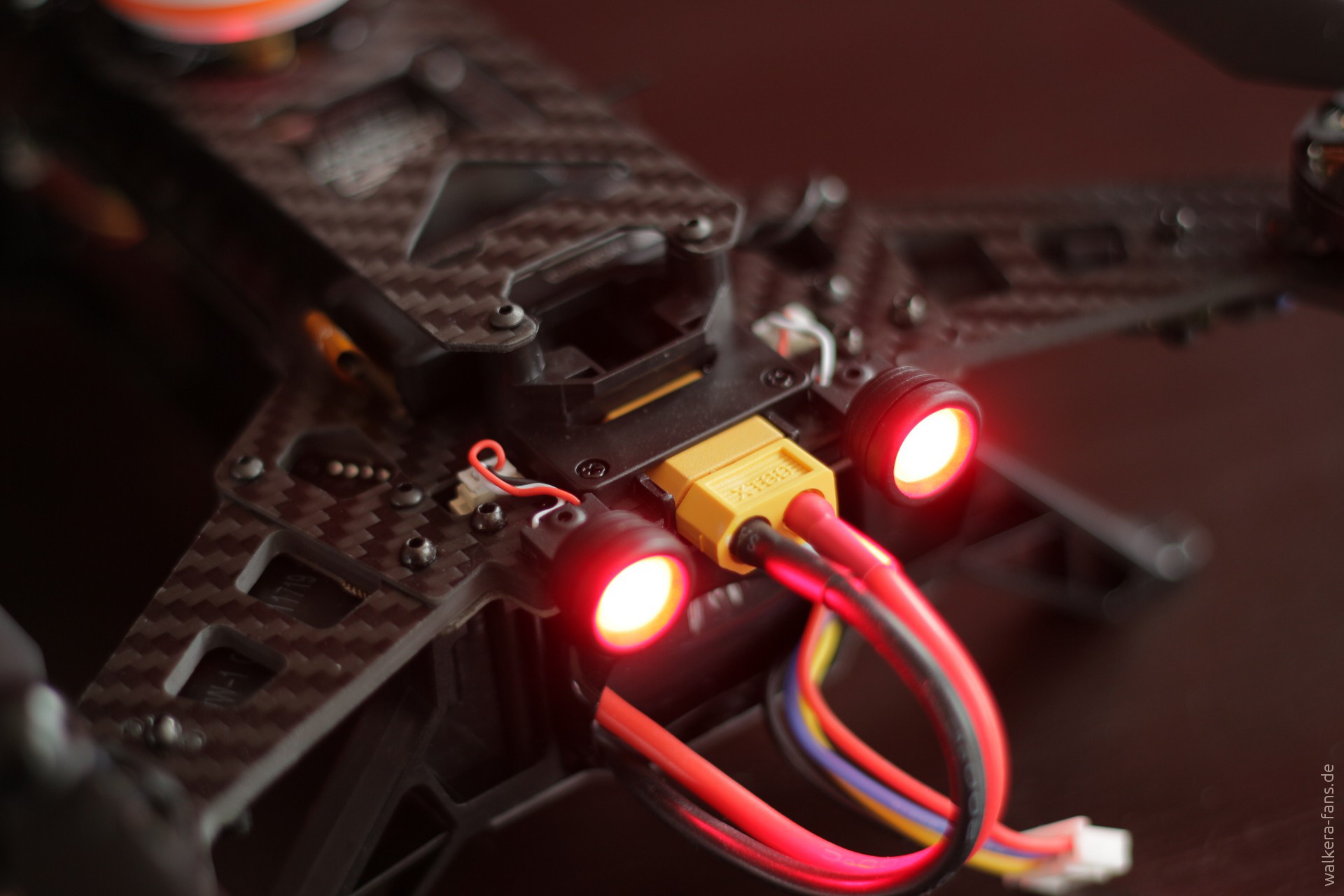
Akkus werden mit einem XT60-Stecksystem verbunden.
Der Karton, in dem der Runner geliefert wird, ist praktisch konstruiert und kann dadurch auch weiterhin genutzt werden, um Kopter mitsamt Funksender zu transportieren.
Lieferarten
Der Walkera Runner 250 ist in verschiedenen Paketen verfügbar. Am günstigsten zu bekommen ist der Bausatz ohne FPV Equipment. Im RTF Set ist immer ein Devo 7 Sender und ein LiPo-Akku inklusive. Größere Pakete enthalten FPV Kamera und Videosender. Die nächstgrößere Variante enthält ein OSD-Modul, womit unter anderem die Akku-Spannung im FPV-Bild eingeblendet wird. Das größte Set beeinhaltet außerdem noch die FPV Brille Walkera Goggle 2. Grundsätzlich ist darin alles enthalten, was ein neuer Pilot braucht, um in den FPV Flug einzusteigen.
Ein Manko ist in unseren Augen das in allen Bundles mitgelieferte Ladegerät GA005. Dieses ist aufgrund minderwertiger Qualität und mangelhaftem Funktionsumfang nicht praxistauglich. Wir empfehlen die Anschaffung eines zuverlässigen Laders, der auch Storage-Ladung beherrscht.
Flugverhalten
Der Walkera Runner 250 ist für manuelles Fliegen gedacht. Im Vergleich zu allen anderen aktuellen Walkera Multikoptern, die ausnahmslos für gleichmäßige Kameraflüge konzipiert sind, wird hier der Pilot deutlich weniger von der Flugsteuerung unterstützt. Der Kopter kommt ohne GPS-Modul, Kompass oder Barometer, hat also aktuell nicht die Möglichkeit, die von Videographen bevorzugten Flugmodi anzubieten. Im Gegenzug sind aerobatische Manöver möglich, die mit den bisherigen Walkera Multikoptern viel schwieriger oder sogar unmöglich durchzuführen sind.
In Kombination mit dem leichten Frame und den starken 2500 Kv Motoren ergibt sich ein Kopter, der eine gute Basis für schnelle Flüge liefert. Die Flugsteuerung reagiert freundlich und lässt den kleinen Racer nicht zu nervös werden. Insofern halten wir ihn für überraschend anfängerfreundlich. Bei besonders schnellen Manövern regelt die Flugsteuerung etwas unpräzise, insbesondere auf der Gier-Achse. Dieses Problem lässt sich offenbar durch Änderungen der PID-Werte in den Griff kriegen oder zumindest deutlich lindern. Sobald wir besonders gute Einstellungen ermittelt haben, werden wir diese in unserem Blog (walkera-fans.de) veröffentlichen.
Der Accelerometer des Kopters wird bei jedem Start des Systems neu kalibriert, was dazu führt, dass der Runner – sollte er nicht gerade stehen – beim Loslassen der Knüppel Im Angle-Modus etwas zur Seite zieht. Insgesamt ist der Flug in diesem Modus bei der aktuellen Firmware nur für langsamere Flüge empfehlenwert. Die Neigungswinkel sind Firmwareseitig so begrenzt, dass etwa ein schnelles Abbremsen schwer fällt. Im Acro Modus gibt es naütlrich keine Winkelbegrenzung, was Flips, Rollen, aber auch enge Kurven erlaubt. Insgesamt ist das Fliegen im Acro-Modus etwas anspruchsvoller, als mit Accelerometer-Unterstützung, lohnt sich aber spätestens beim FPV Flug sehr.


Wer bereits CP Heli geflogen ist, wird feststellen, dass Multikopter im Acro-Modus ähnlich fliegen, dabei aber immer noch ein relativ freundliches Flugverhalten aufweisen. Runner 250 macht in diesem Modus wirklich Laune.
Das Acro-Flugvergnügen endet allerdings beim Einsetzen des LVC (Low Voltage Cutoff). Dieses Mechanismus soll dafür sorgen, dass der Akku durch Tiefentladen nicht geschädigt wird. Der Runner fängt beim Einsetzen des LVC an, mit den roten LEDs zu blinken, regelt die Leistung stufenweise herunter und geht in den Angle Modus. So ist sicheres Zurückfliegen und Landen möglich. Der Kopter bewahrt Piloten davor, mit fast leerem Akku komplexe und energiehungrige Acro Manöver zu fliegen. Der Akku hat nach dem Flug je nach Exemplar etwa 3,8 – 3,75 Volt pro Zelle, was den Akku schont. Die Flugzeit könnte allerdings länger sein, wenn die Grenze anders gelagert wäre. Ein einstellbares LVC wäre hier wünschenswert, vor allem um den Kopter an verschiedene Akkus anzupassen.
Etwas nachteilig auf das Flugverhalten wirkt sich die Abstimmung der Propeller-Regler Kombination aus, die bei minimalem Gaswert schon relativ viel Leistung liefert. Dadurch ist es kaum möglich, schnell und gezielt an Höhe zu verlieren. Dies kann bei schnellen Parcours ein Problem darstellen. Sehr ungünstig ist in diesem Zusammenhang das so genannte “Flip of Death” Verhalten. Gibt der Pilot für einen kurzen Moment 0% Gas – etwa um schnell zu sinken – schalten die Motoren ab. Da sie langsam und ungleichmäßig anlaufen, ist der Absturz vorprogrammiert. Eine Abhilfe schafft eine einfache Programmierung einer zuschaltbaren Standgaskurve im Sender. Glücklicherweise ist Devo 7 ein vollwertiger Modellflugsender und verfügt über alle entsprechenden Möglichkeiten. Trotz des etwas antiquierten Segment-LCD Bildschirms gelingen die Einstellungen mit etwas Übung schnell und unkompliziert.
Tuning-Möglichkeiten
Im Gegensatz zu typischen DIY Koptern ist die Modifizierbarkeit des Walkera Runner 250 eingeschränkt. Die gesamte Elektronik hat spezielle Anschlüsse. Es gibt beispielsweise keine elegante Möglichkeit die Flugsteuerung auf CC3D oder Naze32 umzurüsten.
Das Problem mit dem übermäßig starkem Schub bei geringem Gasgeben lässt sich durch die Verwendung anderer Propeller angehen. Dreiblattpropeller der Größe 5×3 wären beispielsweise hierzu gut geeignet. Die Montage der Propeller diverser Fremdhersteller wie Gemfan oder HQ Prop ist möglich. Hierzu benötigt man Sechskantmuttern nach DIN-EN-ISO 4035 in der Größe M5. Zwei davon müssen Linksgewinde haben. Am besten haben sich bei uns als Ersatzpropeller bislang die 5030 Dreiblatt Propeller von Gemfan geschlagen.
Die Elektronik verträgt einen 4S LiPo ohne Probleme, sofern die Kamera über einen zusätzliche Step-Down-Converter weiterhin mit 12V versorgt wird. 4S-LiPos vertragen sich allerdings nicht unbedingt gut mit den oben genannten Dreiblattpropellern. Bei einem kurzen Test war die Drehzahl zu hoch für die GemFan 5030, sodass der Kopter anstatt zu steigen heulend aus der Luft gefallen ist. Für unsere nächsten Versuche mit 4S-Akku zu fliegen werden wir deswegen Zweiblattpropeller verwenden.


Eine Schwachstelle des Runner 250 ist die mangelnde Absicherung des Akkus für den Fall eines Crashs. Kommt der Kopter vorne auf, kann es passieren, dass der Akku nach vorne durchrutscht und dabei diverse Schäden verursacht.
Besonders harte Unfälle können im schlimmsten Fall das Power Board zerstören. In der Mitte gibt es einen Bereich, in dem es schmal zusammenläuft. Da die Materialdicke eher gering ist, hält die Konstruktion harten Belastungen leider nicht stand. Auch die untere Platte des Frames ist nicht besonders robust, was aber dadurch nicht so sehr ins Gewicht fällt, dass sie sich leicht ersetzen lässt.
Um diese Probleme zu beheben, fing Sascha Kiefer (genannt Sushi alias Walkeraflitzer) an, im 3D-Druck-Verfahren spezielle Rahmenteile zu fertigen. Diese halten den Akku in seinem Bereich wie ein Käfig fest und verteilen die Last, die bei harten Landungen auf das Powerboard drückt. Mittlerweile gibt es von ihm und anderen 3D-Druckprofis verschiedene Lösungen, um das filigrane Powerboard zu schützen und den Akku festzuhalten. Walkera selbst reagierte auf die Problematik mit einer Antirutschmatte, die immerhin das Durchrutschen des Akkus vermindern sollte.
![Walkera-Runner-250-S1860011.MP4_snapshot_00.01_[2015.09.03_20.33.22]](http://walkera-fans.de/wp-content/uploads/2016/01/Walkera-Runner-250-S1860011.MP4_snapshot_00.01_2015.09.03_20.33.22.jpg)
![Walkera-Runner-250-S1860011.MP4_snapshot_00.01_[2015.09.03_20.33.22]](http://walkera-fans.de/wp-content/uploads/2016/01/Walkera-Runner-250-S1860011.MP4_snapshot_00.01_2015.09.03_20.33.22-1024x643.jpg)
Fazit
Der Walkera Runner 250 ist ein vollständig ausgerüsteter 250er FPV Kopter, der aktuell in seiner Preisklasse keine Konkurrenz hat. Er ist gut verarbeitet, voll ausgestattet und hat ein gutes Potential. Alle anderen Geräte dieser Art kosten mehr, wenn man den Gesamtpreis mit FPV Equipment betrachtet, sind dabei aber nicht immer besser. Die meisten Racer erfordern noch Aufwand, da sie aktuell selten RTF verfügbar sind. In seinem Segment ist der Runner 250 somit aktuell ungeschlagen.


Aufgrund seiner weiten Verbreitung, der guten Ersatzteilversorgung und der Reparaturfreundlichkeit durch modulares Design, wird er dem Besitzer lange gute Dienste leisten und man findet leicht eine Community, die bei Fragen hilft.
Die Qualität der Bildübertragung und die Flugeigenschaften sind für Freies Fliegen an schönen Orten ebenso geeignet wie für Racing in der Anfängerklasse. Vor dem ersten Flug sollte unbedingt die Failsafe-Einstellung richtig gesetzt und am besten auch die Gaskurve mit Standgas konfiguriert werden. Außerdem sind das Anbringen einer Rahmenverstärkung mit Akkuhalterung und Feintuning der Flugsteuerung empfehlenswert.
Wenn der Pilot dann noch einen hinreichend großen Vorrat an Propellern hat, darf er sich auch gelegentliche Crashs im weichen Terrain erlauben.
Wenn es härter zur Sache geht, kommt der Runner 250 dagegen schnell an seine Grenzen. Weder sind die Flugeigenschaften für besonders schnelle Flüge ausreichend, noch hält der Kopter den typischen Crashs dieser Gangart stand.
Der Walkera Runner 250 ist somit besonders empfehlenswert für Piloten, die bereits etwas Erfahrung mit Multikoptern haben und einen Einstieg in die Welt des FPV suchen. Sobald aber das Herantasten abgeschlossen ist und die Ansprüche an das Modell steigen, wird es nach wie vor das beste sein, sich einen eigenen Kopter aus besonders hochwertigen Einzelteilen zusammenzustellen.

Wer bereits einen teuren selbstgebauten FPV Racer hat, wird mit dem Walkera Runner 250 vermutlich nur dann glücklich werden, wenn der selbstgebaute Kopter nicht so recht geglückt ist. Mit einem gründlich konzipierten und optimierten Eigenbau wird der Runner was Flugeigenschaften und Robustheit angeht eher selten mithalten können, was in Anbetracht der investierten Zeit und auch aufgrund des Preisunterschiedes niemanden wundern dürfte. Schließlich kosten Profi-Frames der 250er Klasse oft das Gleiche, wie der vollständige Runner 250 BNF Paket.


Da die o.g. Tuningarbeiten sinnvoll bzw. notwendig sind, ist der Runner zwar kein echtes RTF-Modell, erfordert aber dennoch weit weniger Arbeitsaufwand als jeder Eigenbau. Der Runner ist für uns ein bewährter FPV- und Acro-Trainer geworden, mit dem wir schon viele erfolgreiche Flüge und einige harte Landungen absolviert haben. Ob Flips im Regen oder Lehrer-Schüler FPV Ausflüge mit Passanten: Runner hat uns noch nie im Stich gelassen.
Ausblick: Runner Advance
Walkera arbeitet bereits an der Weiterentwicklung. Der Nachfolger trägt den Namenszusatz “Advance” und verfügt unter anderem über ein zeitgemäßes GPS-Modul, dass zur Erhöhung von Zuverlässigkeit und Präzision zusätzlich GLONASS empfängt.
Äußerlich fallen ein etwas geändertes Design mit roten Akzenten, sowie LED-Streifen an den Armen, die als Flugrichtungsanzeiger dienen, sofort ins Auge. Zudem haben die Propeller eine abgeänderte Form.
An mehreren Stellen wurden Änderungen vorgenommen, die für mehr Robustheit sorgen sollen. Die Front bekommt einen markanten Bügel und der Akku wird mit einer Halterung befestigt.


Durch den Zusatz von GPS wird auch das OSD sinnvoller als beim aktuellen Runner 250. Des weiteren werden Flugmodi verfügbar sein, die man von Kamerakoptern kennt: Position Hold und Return to Home. Das ist in der Racer Szene bislang ein Novum, wird aber mit Sicherheit praktisch sein, noch besser den FPV Flug üben zu können.
Christian Schowalter (nVentor) und Sergei Pachtchenko (gektor)