Stellt bitte eure Fragen in unserem Forum. Wir bemühen uns, soweit die Zeit es zulässt, darauf Antworten zu finden und diese hier zu veröffentlichen.
Inhalt
Neueste FAQ Einträge
- Wie kann ich bei der Devo 7 die Trimmung deaktivieren?
- Was ist OneShot125?
- Welchen Akku Akku soll ich für meinen Walkera Kopter kaufen?
- Die Kamera hat eine Auflösung von 800TVL. Was bedeutet das?
- Wie heißen die Stecker, die in vielen aktuellen Walkera Modellen im Inneren und bei der iLook verwendet werden (Kompass, GPS, etc.)?
- Mein Motor hat Vibrationen. Was kann ich tun?
Allgemein (10)
Wie installiere ich die Firmware? Wie lade ich die Modellkonfigurationsdatei auf mein Devo Sender?
Lest hierzu bitte unseren Artikel Walkera Update Anleitungen.
Mein Kopter / Helikopter startet die Motoren nicht. Er blinkt nur. Wieso?
Die Ursachen können verschieden sein.
Die Modelle haben immer mehr Sicherheitsmaßnahmen, die ein Starten in bestimmten Zuständen verhindern.
Wenn der Akku nicht voll geladen ist, kann man viele Modelle nicht starten.
Wenn die Flugsteuerung das GPS Modul das Kompass Modul nicht erkennt, wird die Freischaltung der Motoren ebenfalls verhindert. Oft hat man nach dem Umbau vergessen ein Kabel wieder an die richtige Stelle zu stecken ein Kabel ist gerissen.
Der Empfänger könnte eine feste ID haben, was eine Bindung an einen Sender verhindert. Der Empfänger könnte auch defekt sein.
Kann ich den UP02 Adapter durch einen anderen Adapter ersetzen?
UP02 Adapter wird verwendet, um diverse Modelle, Empfänger und Gimbals von Walkera zu aktualisieren.
Die Idee liegt nahe, den Adapter durch einen Arduino zu ersetzen. Der UP02 Adapter verwendet aber einen ARM Chip und ist daher mit Arduino nicht kompatibel (3.3 V UART gegen 5 V bei Arduino / Atmega).


Uns ist bislang nur ein Versuch bekannt, den UP02 Adapter durch etwas Günstigeres zu ersetzen: UP42 – A Walkera UP02 Quadcopter firmware flasher clone. Dieser verwendet den seriellen Port des PC und einen selbst gelöteten Adapter mit Spannungswandler. Etwas für Technik- und Lötprofis.
Welchen Akku Akku soll ich für meinen Walkera Kopter kaufen?
Meistens ist der vom Hersteller empfohlene Akku sehr nah an dem, was man als Ersatzakku kaufen sollte.
Die Originalakkus von Walkera haben eine gute Passung zum Modell und sind bei richtiger Behandlung erfahrungsgemäß sehr langlebig.
Akkus mit höherer Entladerate (mehr C) oder höherer Kapazität als die originalen sind häufig nicht zielführend, da die Steigerung dieser Werte auch mit einem höheren Gewicht einhergeht, was sich negativ auf die Flugeigenschaften und die Flugdauer auswirkt.
Viele meinen, man dürfe dem Hersteller nicht bei der Wahl des Akkus trauen und versuchen durch die Wahl eines „Tuning-Akkus” (Akkus mit anderen Werten) mehr aus dem Modell rauszuholen. Solche Testreihen sind schön und bringen manchmal gute Ergebnisse, aber sehr oft landet man am Ende doch irgendwo in der Nähe der vom Hersteller gewählten Parameter.
Der Hersteller hat das Modell i.d.R. sehr sorgfältig berechnet und getestet und es mit einem entsprechend sinnvollen Gesamtantrieb, wozu der Akku auch gehört – ausgestattet.
Was ist OneShot125?
Bisher wurde zur Signalübertragung von FC zu ESC Pulsweitenmodulation (PWM) genutzt. Mit einer Frequenz von bis zu knapp 500Hz (schneller geht wohl nicht). Das heißt, ein Signal dauert 1/500s (also 2 Millisekunden).
Das ist für Multikopter aber eigentlich zu langsam.

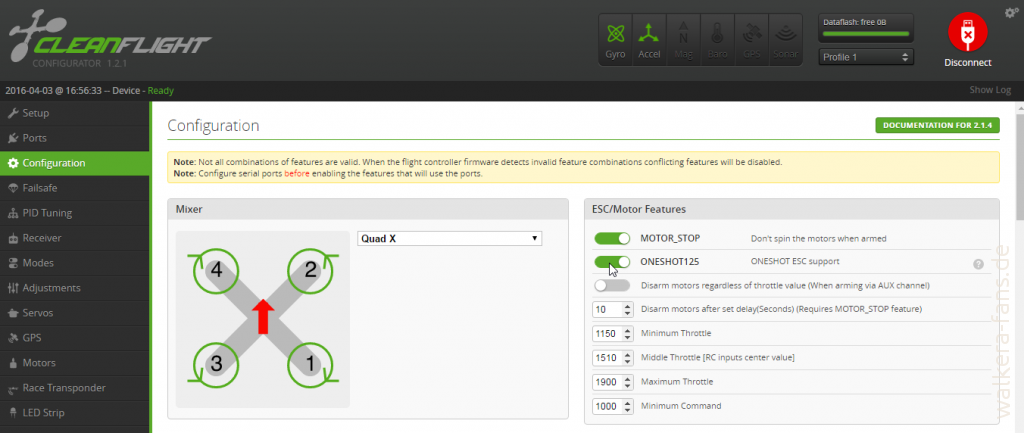
OneShot125 löst dieses Problem, indem das Signal etwas anders moduliert wird. Anstatt dass man 2ms lange Signalabschnitte hat, kommt mit OneShot ein Puls, der 125 – 250µs (also 0,125 – 0,250ms) lang dauert. 125µs für 0% bis 250µs als 100%.
Zusätzlich kommt nur dann ein Puls, wenn sich der Wert ändert.
Im Endeffekt verringert sich die Verzögerung dadurch im Schnitt auf ein Achtel im Vergleich zum 490Hz PWM.
Der Effekt ist, dass die Korrekturen der Flugsteuerungen schneller umgesetzt werden können. In Kombination mit der aktiven Bremse lassen sich viel höhere PID-Wert einstellen, ohne dass der Kopter oszilliert. Dadurch ist der Kopter insgesamt besser beherrschbar und kann extrem dynamische Manöver umsetzen.
Kann ich meine Akkus parallel laden?
Die meisten günstigeren Ladegeräte können mit maximal 5 – 6 Ampere laden. Das heißt, dass so ein Gerät gerade ausreichend Leistung hat, um einen X350 Pro Akku mit 1C (5200 mAh Akku bei 1 C ergibt also 5,2 A Ladestromstärke) aufzuladen. Aufladen mit 1C dauert in der Regel ca. eine Stunde und ist die empfohlene Ladeart bei den meisten Akkus.
Wenn man ein Parallel-Board einsetzen möchte, braucht man meist ein Ladegerät, das höhere Stromstärke liefern kann. Die Lade-Stromsträrke (Ampere) muss bei zwei Akkus verdoppelt werden, bei drei – verdreifacht, etc. Für drei X350 Pro Akkus bräuchte man 15 A Ladestrom. Ein 20A Ladegerät kann bei maximaler Lade-Stromstärke vier X350 Pro Akkus parallel aufladen (z.B. mit diesem Board). Das Netzteil muss dabei natürlich auch passend dimensioniert sein (mindestens 350 W).
Man muss beim Parallelladen darauf achten, dass die Akkus vom selben Typ sind, in Etwa den gleichen Innenwiderstand aufweisen und vor dem Laden in etwa gleiche Spannung haben. Es ist eine gute Idee, die Akkus nach dem Flugtag mit dem Ladegerät auf Lagerspannung (spezielles Programm, hat jedes vernünftige Gerät) zu bringen und mehrere Akkus von der gleichen Sorte zu nutzen. Somit wären alle Bedingungen erfüllt.
Mit ausreichend Stromstärke und mit etwas Vorsicht kann man die Sache mit dem Parallel-Laden ruhig machen und Zeit sparen.
Eine Alternative sind Ladegräte, die mehrere separate Ladeplätze besitzen. Im Grunde sind das zwei bis vier Ladegeräte in einem. Leider sind die einzelnen Ladeplätze bei einem solchen Gerät oft nicht besonders stromstark, was bei Nutzung von Akkus mit sehr hohen Kapazitäten ein Nachteil sein kann.
Mein X350 Pro Akku hat 10C. Was bedeutet die C‑Rate beim Akku?
C ist ein Wert, der die maximale Stromstärke des Akkus in Bezug auf seine Kapazität beschreibt. Die C‑Rate resultiert aus den physikalisch-chemischen Eigenschaften des Akkus.
Die Formel lautet:
Elektrische Ladung in mAh x C = Stromstärke in mA (geteilt durch 1000 ergibt Ampere).
Beispiel: Der 6S Akku des Tali hat 5400 mAh und 10C. Das bedeutet, dass er voll geladen 54 Ampere liefern kann. Ist der Akku nicht mehr voll und hat z.B. nur noch 3300 mAh übrig, liefert er entsprechend nur noch 33 Ampere. Und so weiter. Denn die C‑Rate bezieht sich immer auf die aktuell verfügbare elektrische Ladung im Akku.
Man gibt die maximale Amperezahl beim Laden ebenfalls mit C an. In der Regel soll jedes LiPo Akku mit 1C aufgeladen werden. 2200 mAh Akku also mit 2,2 Ampere. Die meisten Akkus heute vertragen auch 2C oder mehr. Die C‑Rate beim Laden hängt mit der C‑Rate beim Entladen zusammen.
Bei einer parallelen Schaltung von zwei Akkus erhöht sich die Kapazität und man kann mehr Ampere aus dem entstandenen Akkupack ziehen. Die C‑Rate bleibt aber als Eigenschaft der Akkus erhalten.
Wo finde ich Modelleinstellungen, Anleitungen, etc.?
Bitte schaut im Downloadbereich nach!
Die Anleitungen zum aufspielen der Modelleinstellungen und der Firmware Files findet ihr in unserem Artikel Walkera Update Anleitungen.
Benutzt auch die Suche oben sowie die Navigation rechts, die in übersichtlichen Kategorien und Tags strukturiert ist.
Beachtet bitte, dass ihr die Software auf eigene Verantwortung aktualisiert. Prüft bitte alles mehrmals vor dem Flug. Wir bitten von Zusendung von abgebrochenen Modell-Einzelteilen abzusehen. Lest bitte unseren Artikel über die Sicherheit.
Mein Motor hat Vibrationen. Was kann ich tun?
Einen Motor kann man wuchten.
Hierzu nimmt man einen Kabelbinder und befestigt ihn rund um den Motor.
Ein Kabelbinder hat eine Stelle, die etwas schwerer ist: Den Verschluss.
Man dreht nun den Kabelbinder immer ein kleines Stück weiter, schaltet den Motor (ohne Propeller) ein und beobachtet die Vibrationen.
Wenn die Stelle gefunden ist, bei der der Motor weniger vibriert, markiert man die Stelle, nimmt den Kabelbinder ab und beschwert die markierte Seite des Motors mit Tesa Streifen, bis die gewünschte Laufruhe erreicht ist.
X350 (erste Version) (4)
Wozu ist der Stromanschluss, der aus meinem X350 (Pro) rauskommt und wie viel Volt trägt er?
Am X350 ist es der rote JST BEC Anschluss, am X350 Pro ein kleiner weißer Stecker.
Dieser Anschluss führt 12V, die direkt vom Akku ohne jegliche Wandlung kommen.
Er ist für ein Brushless Gimbal und / oder FPV Equipment bestimmt.
Wie legt man bei X350 und anderen GPS Modellen die Return to Home Funktion auf den Gear Schalter?
Wie heißen die Stecker, die im X350 im Inneren verbaut sind (Kompass, GPS, etc.)?
Vermutlich sind das DF13 Stecker.
Was ist das LVC und wie kann ich es an meinem X350 deaktivieren?
LVC steht für Low Voltage Cutoff = Abschaltung bei geringer Akkuspannung.
Diese Funktion sorgt dafür, dass der Akku nicht zu tief entladen wird und so geschont wird.
Leider ist die Software des X350 so programmiert, dass die Aktivierung des LVC das Flugverhalten ungünstig beeinflusst. Der Kopter könnte zu schnell sinken.
Das LVC kann man durch das zu Überbrücken eines Kabels der Stromversorgung der Flugsteuerung umgehen. Wie das geht, zeigen wir in dem folgenden Artikel.
X350 Pro (9)
Wozu ist der Stromanschluss, der aus meinem X350 (Pro) rauskommt und wie viel Volt trägt er?
Am X350 ist es der rote JST BEC Anschluss, am X350 Pro ein kleiner weißer Stecker.
Dieser Anschluss führt 12V, die direkt vom Akku ohne jegliche Wandlung kommen.
Er ist für ein Brushless Gimbal und / oder FPV Equipment bestimmt.
Welche Ersatzmotoren kann man für X350 Pro verwenden?
Bislang wurden Emax MT2213-935KV im Forum erprobt und für gut befunden.
Sollte man beim Walkera QR X350 Pro und anderen den Kompass vor jedem Flug in derselben Region kalibrieren?
Kurze Antwort: Nein.
Das Häufige Kalibrieren ist nicht nur nervig: Es kann sogar problematisch sein. Wenn die Kalibrierung aus irgendeinem Grund schief läuft, ist sie vielleicht schlechter als die Vorherige. Die Genauigkait von Kalibrierungsdaten kann sehr verschieden sein.
Auch der Hersteller empfiehlt, nur dann zu kalibrieren, wenn man seine Position um mehrere Hundert Kilometer ändert. Die magnetische Deklination ist für diese Empfehlung verantwortlich.
Wenn man bauliche Veränderungen vorgenommen hat oder der Kopter im GPS Modus komisch fliegt, sollte man eine Kompasskalibrierung wagen. Ansonsten ist es eher kontraproduktiv und nervig.
Ich kalibriere meine Walkeras (und auch DJIs, MultiWiis, etc.) einmal ordentlich und dann nie wieder. Vielleicht nach Software Updates oder wenn ich in einem weit entfernten Gebiet fliege (über 300 km weit weg von der letzten Stelle).
Dieser Ratschlag gilt für alle Kopter mit GPS.
Die neueren Walkera Kopter (ab 2014) arbeiten mit der Arducopter Firmware. Diese kalibriert den Kompass während des GPS Fluges auf Basis der GPS Daten. Diese Feinkalibrierung zerstört man, wenn man manuell kalibriert.
Die automatische Korrektur greift recht schnell. Vor allem wenn man den Kopter nicht bloß auf der Stelle schweben lässt, sondern etwas im GPS Modus in verschiedene Richtungen geradeaus fliegt.
Man merkt eigentlich recht schnell, wenn der Kompass völlig falsch kalibriert ist oder eine sonstige grobe Fehlfunktion zeigt. Der Kopter fängt an im GPS Modus abzuhauen. Entweder fängt er sich aufgrund der automatischen Kalibrierung wieder, oder man schaltet wieder in den manuellen Modus und muss am Boden kalibrieren.
Kann ich 9 Zoll Karbonpropeller von DJI Phantom 1 für X350 Pro mit FPV und G‑2D verwenden?
Die Originalpropeller des X350 Pro haben einen Durchmesser von 9 Zoll.
Die Verwendung der 9,4 Zoll Karbonpropellern, die als Tuning für das DJI Phantom 1 verkauft werden, ist am X350 Pro nicht empfohlen.
Die großen Karbonpropeller, die auf das Phantom 1 passen, funktionieren mit den Standard Gain Werten des X350 Pro nicht gut zusammen. Der Kopter fliegt instabil.
Genau so grenzwertig ist die Verwendung der Original Plastikpropeller des Vorgängermodells X350 (diese Haben die Größe von 8 Zoll) am voll bepacktem X350 Pro. Ein X350 Pro ohne Zuladung fliegt mit den 8 Zoll Propellern des Vorgängers allerdings stabil.
Was ist der Unterschied zwischen den RX-703 und RX-703A Empfängern für X350 Pro? Kann ich RX-703 mit Devo F7 nutzen?
RX-703 ist ein 10-Kanal Empfänger und ist z.B. für Devo 10 geeignet. Die Kanäle AUX 3, 4 und AUX 5 werden nach Außen geleitet um z.B. das G‑2D Gimbal zu steuern.
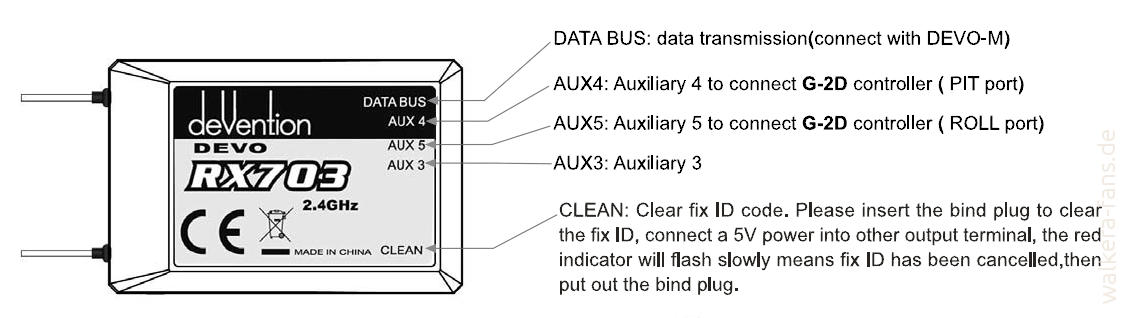

RX-703 funktioniert zwar grundsätzlich mit Devo F7 und der Kopter fliegt damit gut, es werden aber nur die ersten sieben Kanäle angesteuert. AUX 3, 4 und 5 kann man mit Devo F7 nicht ansprechen. Somit kann man G‑2D damit nicht ansteuern.
Devo 8 könnte z.B. den achten Kanal AUX 8 ansteuern und passt daher bedingt zum RX703. Für G‑2D braucht man so wie so nur einen Kanal für die Nick-Achse.
RX-703A ist ein 7‑Kanal Empfnger. Man kann AUX2 nach Außen leiten und damit z.B. die Nick-Achse des G‑2D Gimbal steuern. Der Empfänger RX-703A ist für Devo F7 geeigneter.
Siehe auch: Wie sind die Standard Kanäle bei Walkera Devo Sendern verteilt?
Kann man die Kompass Position ändern?
Grundsätzlich hat Walkera in ihrer Firmware für die Flugsteuerung (Devo M) nicht vorgesehen das die Position des Kompassmodules geändert wird.
Aufgrund der Metallanteile im Kopter und auch der elektromagnetischen Felder des Systems ist die Positionierug des Kompasses an einem Kopter nicht einfach egal und muss im Zweifelsfall durch etliche Tests erflogen werden.
Die Arducopter Software bietet aber eigentlich die Möglichkeit auch den OFFset des Kompassmodules durch Kalibration automatisch zu erkennen, bei Walkera muss man den Kopter und die Funke binden und den APM oder Mission Planner starten. Im innitial Setup kann dann unter Kompass auch eine Kalibrierung vorgenommen werden und auchder Offset wird neu erkannt und in den Parametern gespeichert.
Daher scheint es auch möglich die Kompassposition am QR X350, Scout und Tali zu verändern.
Wie heißen die Stecker, die in vielen aktuellen Walkera Modellen im Inneren und bei der iLook verwendet werden (Kompass, GPS, etc.)?
Bei den neueren Walkera Modellen (2014 und spätere) kommen Stecker mit Sicherungsklemme zum Einsatz.
Die Steckverbinder heißen JST GH, Raster 1,25mm, 4‑polig (GHR-04V‑S).
Dazu passen JST Crimpverbinder der Serie SSHL (SSHL-002T-P0.2).
Wie konfiguriere ich meinen X350 Pro und andere Walkera Modelle?
Man kann den APM Mission Planner nutzen.
Wie schließe ich den Empfänger RX703A für den Betrieb mit einem Gimbal an X350 Pro an?
Walkera hat ein Dokument veröffentlicht, in dem die Belegung des RX 703A und die Konfiguration des Senders beschrieben ist (Englisch):
Devention (Devo) Sender und Empfänger (23)
Wie sind die Standard Kanäle bei Walkera Devo Sendern verteilt?
Bei standard Heli Setup:
- Elevator (Nick)
- Aileron (Roll)
- Throttle (Gas)
- Rudder (Gier)
- Gear (Landegestell)
- Pitch
- Gyro / AUX2
- AUX3
- AUX4
- AUX5
- AUX6
- AUX7
Bei standard Flächenflugzeug Setup (wird auch für Multikopter verwendet):
- Elevator (Nick)
- Aileron (Roll)
- Throttle (Gas)
- Rudder (Gier)
- Gear (Landegestell) = Flugmodus bei Koptern
- Flap
- Gyro / AUX2 = IOC (Simple Mode) bei Koptern
- AUX3
- AUX4
- AUX5
- AUX6
- AUX7
Die Zahl im Namen des Senders, z.B. Devo 7 oder Devo 12, bedeutet die Anzahl der Kanäle, die der Sender ansteuern kann.
Oftmals führt zu Verwirrung, dass es einen Schalter „Gear” und einen Regler „Aux2” an den Devo-Sendern gibt. Diese regeln nicht zwangsläufig die gleichnamigen Kanäle, sondern nur, wenn dies im Menü „Output” so festgelegt wurde. Die Kanäle können dort auch auf andere Bedienelemente gelegt werden.
Regler anlernen mit Devo Sender (Gas Hebel nach oben schon beim Binden)
Bei den RTF Modellen von Walkera muss nichts angelernt werden. Viele nutzen die Devo Sendeanlagen aber auch für ihre Selbstbau Projekte. Diese Information richtet sich also an die Modellbauer.
Die meisten Brushless Regler (ESC = Electronic Speed Controller) müssen vor dem ersten Gebrauch an den Gasweg der jeweiligen Sendeanlage angepasst (angelernt) werden.
In aller Regel wird das Anlernen so durchgeführt:
- Starten des Systems mit dem Gashebel auf 100% (Ohne Propeller!)
- Eine Tonsequenz ertönt
- Den Gashebel in die Position Null bringen
- Strom trennen
Das Problem, das die meisten an dieser Stelle haben ist die Schutzfunktion der Devo Sender: Sie lassen sich nicht starten, wenn der Gashebel nicht in der Position Null steht.
Es ist dennoch möglich, den Regler anzulernen:
- Sender und Empfänger ganz normal binden
- Jetzt den Empfänger (das Modell) vom Strom trennen, aber nicht den Sender ausschalten
- Gas auf 100% stellen
- Modell mit Strom versorgen
Der Empfänger speichert die letzte Bindung und da der Sender noch mit der selben Bindung arbeitet, muss die Bindesequenz nicht erneut durchgeführt werden. Der Regler wird nun wie gewohnt angelernt
Wer mit der Fixed ID arbeitet, kennt das Verfahren genau so. Es ist egal, was man zuerst einschaltet. Der Empfänger findet sofort den Sender.
Wieso funktioniert meine Devo nicht mit original Phoenix Simulator Kabel?
Ein Devo Sender erwartet eine mono Klinke am Eingang. Wenn eine Stereo Klinke am Eingang eingesteckt wird, wechselt der Sender nicht in den Simulatormodus.
Ein simpler Mono-Klinke Adapter löst das Problem.
Was hat die Sache mit dem Mindest-Gaswert an sich und wie stelle ich das ein?
Hier ein Video dazu:
Video-Link: https://www.youtube.com/watch?v=XAWlXqYO1CI
Wenn man im manuellen Modus fliegt, reagieren die Motoren der bislang bekannten Walkera Modelle mehr oder weniger proportional zur Bewegung des Gasknüppels. Steht der Gasknüppel auf Null, stehen auch die Motoren. Und bei 100% erreichen die Motoren in Etwa* die Maximaldrehzahl.
* Ich schreibe immer „mehr oder weniger” und „in Etwa”, weil die Flugsteuerung auch in die Drehzahl der Motoren eingreift um den Kopter zu neigen und zu stabilisieren.
Es kann aber nachteilig sein, wenn der Motor bei Knüppelstellung Null ausgeschaltet wird.
Bei älteren Modellen wie dem MX400 brauchten die Regler eins-zwei Sekunden zum Anlaufen. Bleiben die Motoren im Flug stehen, dauert es meist zu lange, um sie wieder einzuschalten. Zudem gehen sie beim „MX” nicht zeitgleich an.
Bei neueren Modellen wie dem X350 Pro oder Tali H500 springen die Motoren relativ schnell an. Dennoch kann es sein, dass man aus Versehen in relativ geringer Höhe den Knüppel auf Null stellt. Wenn die Fallbewegung eingeleitet ist, braucht man viel Energie um sie zu stoppen. Das will man nicht riskieren.
Die Lösung: Minimum-Gas (oder Mindest-Gaswert, auch Standgas genannt) einstellen.
Mindestgas Einstellen gelingt am besten über die Modelleinstellungen des Devo Senders. Folgendes Verfahren passt zu allen mir bekannten Devo Modellen.
Wir definieren zum einen die Throttle Hold funktion und zum anderen stellen wir eine Gaskurve mit einem Mindestgas von 8% (6,5 reichen meistens auch) ein. Bei 8% laufen die Motoren der meisten Kopter definitiv an, aber der Kopter hebt noch nicht an.
Im Betrieb mit Mindestgas muss man beachten, dass man vor dem Start den Throttle Hold Schalter aktiviert (auf 1), dann die Motoren mit dem Stickbefehl entsperrt und dann den Throttle Hold wieder deaktiviert (auf 0). Die Motoren laufen dann mit dem voreingestellten Gaswert an.
Nach dem Landen (oder besser 1cm vor dem Touchdown) muss Throttle Hold wieder aktiviert werden.
Ihr fragt euch, ob der Kopter, der keine Funktion zur Freigabe der Motoren hat, so schon beim Start des Senders die Motoren einschaltet? Ladybird & Co. werden dies sicher tun. Die Motoren dieser Kopter gehen aber wirklich schnell an. MX400 und Hoten‑X schalten die Motoren nicht an, sondern warten auf einen einmaligen Nullsignal und erst dann werden die Motoren aktiviert. Man muss also den Throttle Hold einmal nach der Bindung ein-und-ausschalten, damit die Motoren anlaufen.
Throttle Hold (Killswitch) definieren
Siehe den FAQ Artikel zum Throttle Hold.
Möglichkeit 1: Gaskurve anpassen
Die Gaskurve bei den Devo sendern besteht aus einer Anzahl an Punkten (meistens 7), die wir verändern können. Standardmäßig sind Punkte L (low) M (middle) und H (high) als aktiv gekennzeichnet. Aktiv bedeutet, dass die Punkte einen definierten Wert aufweisen. Wenn der Punkt nicht aktiv ist, wird sein Wert nicht durch den Nutzer vorgegeben, sondern zwischen zwei benachbarten Punkten interpoliert.
Wir wollen nur die Kurve zwischen dem Punkt L und 1 verändern und somit müssen wir den Punkt 1 aktivieren, damit er den ihm zustehenden Wert von 16,5% bekommt.
Den Output am Punkt L können wir jetzt auf 8% einstellen. Fertig.
Möglichkeit 2: Gas-Trimmer verwenden
Im Gegensatz zu anderen Trimmern verändert der Gas-Trimmer nicht die Mitte, sondern den Nullpunkt des Gaskanals.
Man stellt mit dem Trimmer einfach den gewünschten Mindestwert ein.
Wie binde ich den Empfänger? Was ist Fixed ID und wozu ist das gut?
Jeder Bindevorgang im normalen Modus läuft bei Devo Funktechnik so ab:
- Der Empfänger wird eingeschaltet und geht in den Suchmodus.
- Der Sender wird eingeschaltet und sucht ebenfalls den Empfänger. Dieser Suchlauf läuft eine gewisse Zeit, meistens 12 Sekunden. Dabei ist es egal, ob man zuerst den Sender oder den Empfänger einschaltet.
- Wenn beide Geräte in diesem Suchmodus sich sehen, einigen sie sich auf eine zufällig gewählte Zahlen-ID (Shake Hands), die für diese Verbindung zwischen den beiden Geräten besteht und den Funkverkehr bestimmt. Weil es sehr viele mögliche IDs gibt, kann man auch sehr viele Devo Sender und Empfänger an einem Flugplatz verwenden.
Wird der Empfänger ausgeschaltet und wieder eingeschaltet, ist die Verbindung wieder da. Der Empfänger speichert die letzte ID und sucht zunächst den Sender mit dieser ID.
Wird hingegen der Sender ausgeschaltet, geht dieser beim Wiedereinschalten in den erneuten Suchlauf. Wenn der Empfänger am Modell aber nicht aus gewesen ist, ist der Empfänger nicht im Suchlauf inbegriffen. Der Sender kann die Verbindung zum Flugmodell nicht wieder aufnehmen.
Genau für diesen Fall und weil der Bindevorgang schneller vonstatten geht gibt es eine Möglichkeit, feste IDs zu vergeben und so den Sender an den Empfänger fest zu binden. Dabei gelten die Fixed IDs pro Modell-Speicherplatz im Sender.
Eine feste ID kann man einfach aus dem entsprechenden Menü (Model Menu – Fixed ID) vergeben. Dabei wird eine zufällige Zahl als ID vorgegeben oder man kann selber eine Zahl definieren.
Mit der festen ID sind Sender und Empfänger immer gebunden und es ist egal, was wie oft und wann ein- und ausgeschaltet wird. Sobald die zwei gebundenen Geräte eingeschaltet sind, besteht sofort und ohne Verzögerung eine Verbindung.
Der Nachteil einer festen ID könnte die geringere Flexibilität sein. Schließlich kann man seinen Kopter nicht so schnell jemandem geben. Der Ausleiher müsste erst die richtige ID einstellen.
Fixed ID entfernen kann man entweder aus dem Menü der an den jeweiligen Empfänger gebundenen Sender (einfach Fixed ID ausschalten) oder mit dem Bind Plug. Einige Empfänger haben einen „Clear” Taster. Dieser fungiert als ein Bind Plug Ersatz und muss zum Entfernen der Fixed ID beim Einschalten des Empfängers gedrückt gehalten werden.
Wie kann ich bei der Devo 7 die Trimmung deaktivieren?
Trimmer sind die kleinen schwarzen Schalter an den Seiten der Knüppel. Sie verschieben den Bereich, den ein Kanal ansteuert und dienen z.B. dazu, bei Servogesteuerten Flugzeugen die richtige Position für die Servomitte einzustellen.
Bei einem Kopter ist die Trimmfunktion unnötig.
Beispiel: Zum Entsperren der Motoren (Arm) erwartet der Kopter einen ganz bestimmten Wert. Dieser Wert liegt z.B. an dem Gier-Kanal ganz links und beträgt ohne Trimmung 1000.
Wenn man mit dem Trimmer die Werte des Kanals nach rechts verschiebt, liegt der Wert links nicht mehr bei 1000. Der Kopter bekommt den erwarteten Wert nicht und armt somit auch nicht.
Auch bei anderen Kanälen ist die Trimmung unnötig.
Um bei der Devo 7 die Trimmung zu deaktivieren, geht man in das MODEL > STEP und stellt bei allen Kanälen statt des eingestellten Wertes Null ein, z.B. ELEV: 0⁄20 etc.
Step regelt, um wie viele Schritte ein Trimmer einen Kanal verschiebt. Null heißt also, dass der Trimmer gesperrt ist.
Wie legt man bei X350 und anderen GPS Modellen die Return to Home Funktion auf den Gear Schalter?
Wie kann ich die Knüppel meiner Devo Sendeanlage kalibrieren?
Die Knüppel einer Funkfernsteuerung arbeiten mit Potis. Ein Potentiometer ist ein mechanisches Bauteil, welches Verschleiß unterliegt. Deshalb kann es manchmal notwendig werden, die Knüppel der Devo Anlage zu kalibrieren.
Kalibrieren bedeutet hier, dem A/D Wandler mitzuteilen, welche Werte der Poti jeweils annehmen kann. Besonders wichtig sind dabei die Werte für Maximum und Minimum. Diese ermittelt man, indem man die Knüppel in alle Positionen an den Anschlag bewegt.
Jede Devo hat im Menü System den Menüpunkt Calibration. Vor Beginn der Kalibrierung sollte man die Knüppel und Potis in die Mittelstellung stellen.
Wichtig: Auch Gasknüppel muss auf 50%!
Dann mit ENT die Kalibrierung starten und alle Knüppel und Potis bis zum Anschlag langsam in jede Richtung bewegen und anschließend wieder in die Mittelstellung bringen.
Erneut ENT drücken.
Wenn alles richtig gelaufen ist, erscheint Success auf dem Monitor des Senders.
Wieso piepst meine Devo F7?
Die Töne werden bei einer Devo F7 im Menü „System Menu” eingestellt.
- ENT drücken und dann auf „Buzzer” gehen
- Unter der Funktion „Status” kann man die Töne generell ausschalten
- Bei „Throttle Stick” kann man einstellen, ob die Mittelstellung des Gasknüppels einen Tonsignal gibt. Das ist sinnvoll für das Schweben eines Kopters im GPS Modus. Bei 50% bleibt die Höhe konstant und durch den Tonsignal kann man die richtige Knüppelstellung genau einstellen
- Unter „Knob Midpoint” kann eingestellt werden, ob die Mittelstellung des Potis einen Tonsignal gibt
- Unter „Tone” kann die Tonhöhe verändert werden
- Was zudem noch piepsen kann sind die Telemetriealarme. Diese sind unter Menü „Model” und unten „Sensor Setting” einzurichten
Kann ich meinen Devo Sender mit einem LiPo Akku betreiben?
Kurze Antwort: Es gibt zwei Möglichkeiten, einen Devo Sender mit Strom zu versorgen. Doppelte Stromversorgung (etwas sicherer) oder nur über LiPo.
Intern werden standardmäßig normale AA Alkali Batterien (1,5 V) oder NiMh Akkus (1,2 V) verwendet. Es gibt Konfigurationen mit vier (6 V, z.B. Devo 8) oder acht (12 V, z.B. Devo 10) Batterien.
Diese internen Batterien sollte man – meiner Meinung nach – nicht durch LiPo Akkus ersetzen.
Grundsätzlich ist es möglich, z.B. eine Devo 8 mit einem 2S LiPo oder eine Devo 10 mit einem 3S LiPo intern zu betreiben. Allerdings wird die Nennspannung von 6 bzw. 12 Volt in dem Fall überschritten, was z.B. bei Devo 8 (2S = 8,4 V statt 6 V) dazu führen kann, dass der Sender sich nicht ausschalten lässt. Manche nutzen bei Devo 8 einen Widerstand um die Spannung zu senken, was ineffizient ist.
Extern können alle mir bekannten Devo Sender über eine Koaxialbuchse (Hohlstecker, Øinnen = 2,1mm Øaußen =5,5 mm, Schaft: 9 mm) mit einem DC Strom von 12 V versorgt werden (einige Sender wie Devo 8: 8 – 12 V).
Zusätzlich zur Stromversorgung werden die im Sender ggf. befindlichen Akkus mit geringer Stromstärke von 50 mA aufgeladen (je nach Sender unterschiedlich).
Die Akkuanzeige steigt bei externer Stromversorgung auf 100% und bei Sendern mit Farbbildschirm wie Devo 8 steigt auch die Bildschirmhelligkeit.
Das bedeutet, dass man jede Devo problemlos extern mit einem 3S LiPo Akku und / oder einem Netzteil mit Strom versorgen kann.
Ich empfehle eine doppelte Stromversorgung: NiMh Akkus in dem Sender und 3S LiPo von Außen. So ist man doppelt abgesichert.
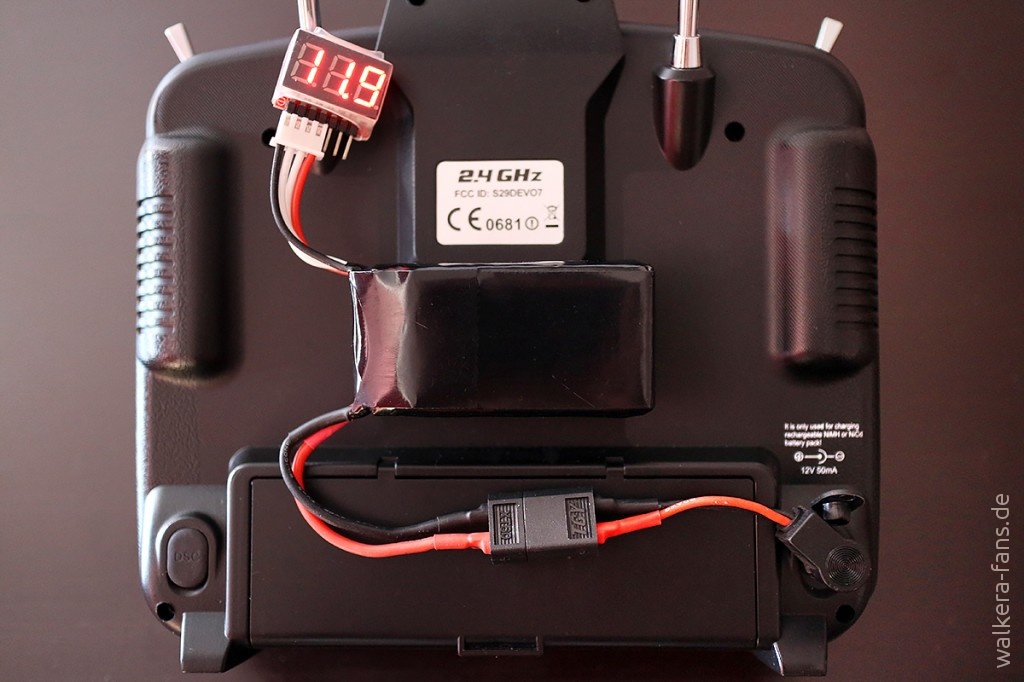
Eine externe Stromversorgung zu bauen geht recht schnell:
- Einen kleineren 3S Akku (z.B. 1200 mAh) nehmen und ihn mit Klett am Rücken des Senders befestigen.
- Einen Adapterkabel löten: auf der einen Seite kommt eine Buchse für LiPo hin, auf der anderen Seite ein Stecker für die Devo (Hohlstecker, Øinnen = 2,1 mm Øaußen = 5,5 mm, Schaft: 9 mm).
Achtung: Bitte achtet darauf, dass euer LiPo nicht zu tief (unter 3,7 V pro Zelle) entladen wird. Verwendet zur Spannungsüberwachung einen LiPo Warner.
So sieht es in der Praxis aus:

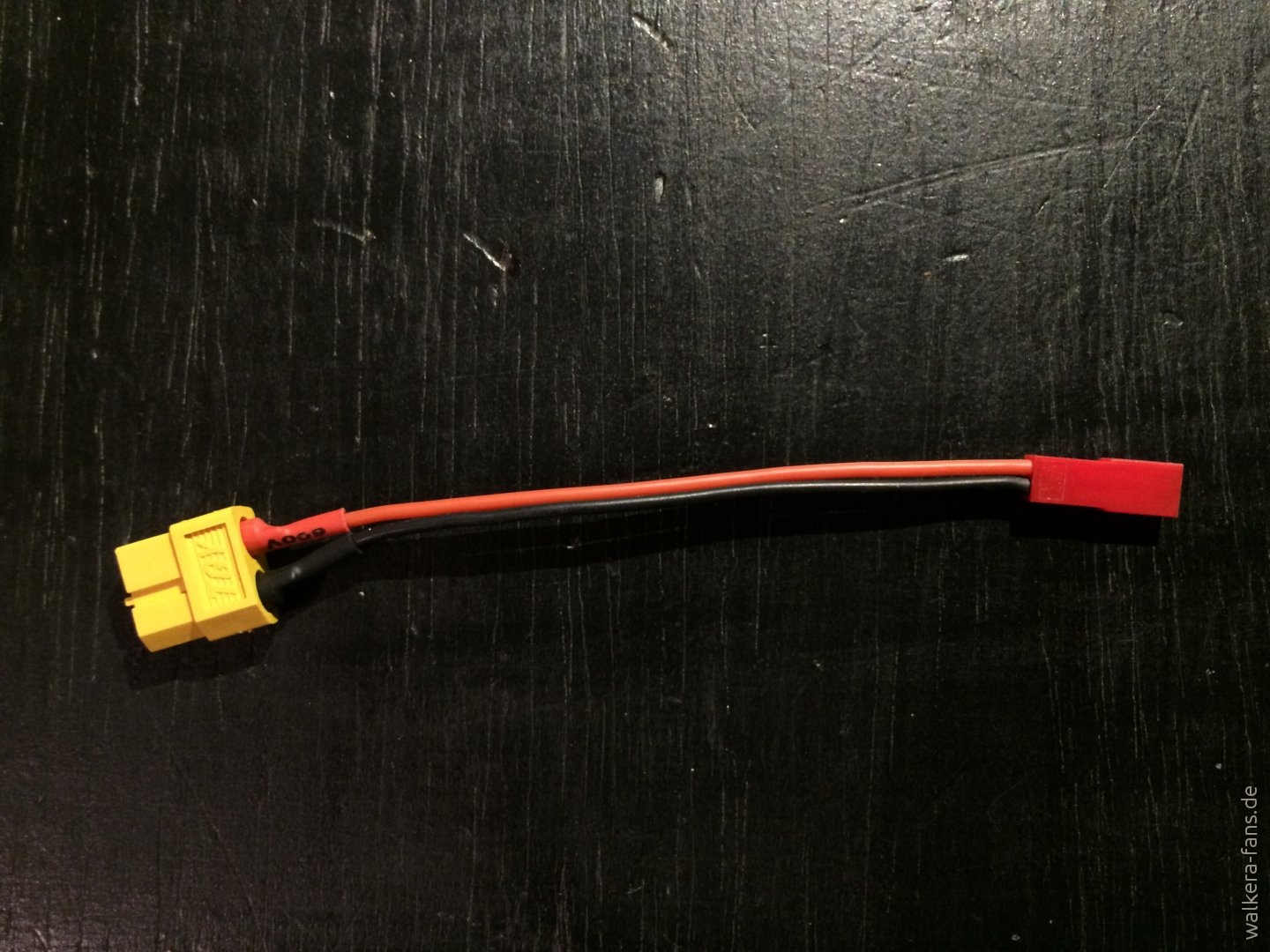
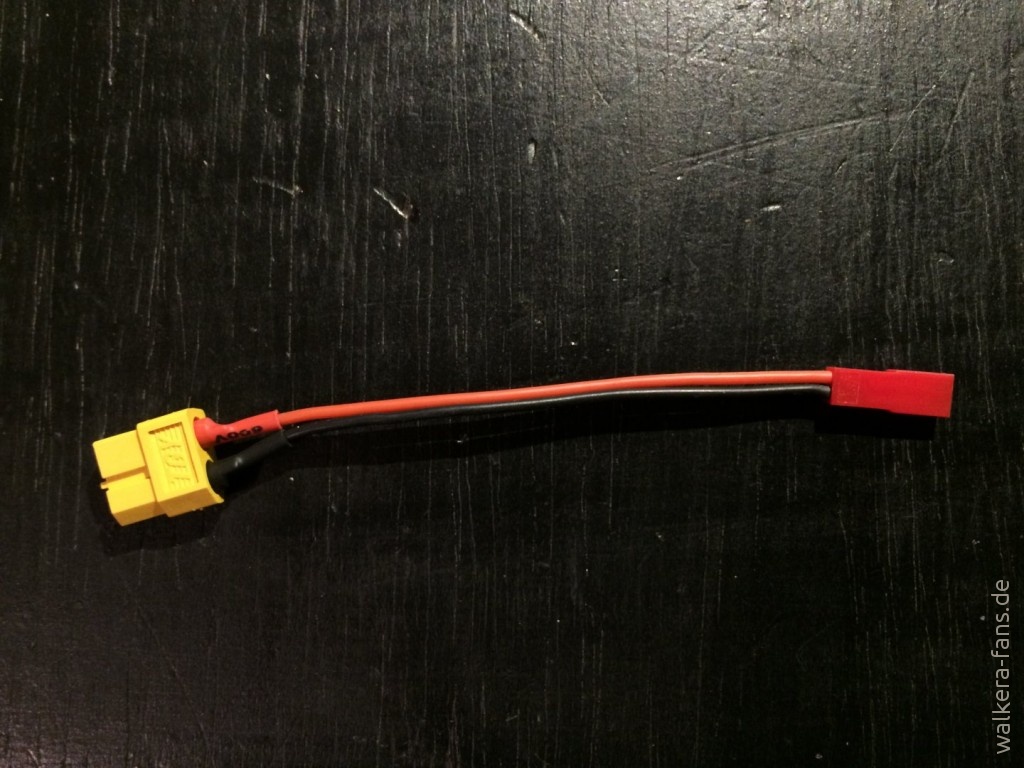
Ab und an kann man die im Sender befindlichen AA NiMh Rundzellen auch einzeln aufladen. Um Zeit zu sparen, kann man den gesamten Pack aus 8 Zellen mit einem Modellbauladegerät im NiMh Programm aufladen. Das ist zwar etwas schlechter für die Zellen, spart aber viel Zeit.
Man benötigt hierzu einen solchen BEC Adapter. Hier mit XT60 Anschluss für das Ladegerät:
Mittlerweile (2015) ist es keine so schlechte Idee mehr, die Devo mit LiPo allein mit Strom zu versorgen. Devo 8 und ihr Überspannungsproblem ist nicht mehr aktuell und alle aktuellen Modelle wie Devo 7, Devo 10 und Devo F12E sind Lipo-Fähig. Devo F12E ist sogar vom Haus aus auf LiPo Betrieb ausgelegt und hat hierzu eine einstellbare Spannungswarngrenze.
Bei Devo 7 und Devo 10 kann man einfach einen 3S LiPo mit BEC Stecker verwenden. Allerdings ist es auch hier wichtig, auf die Spannung des LiPo zu achten, um ihn nicht zu beschädigen.
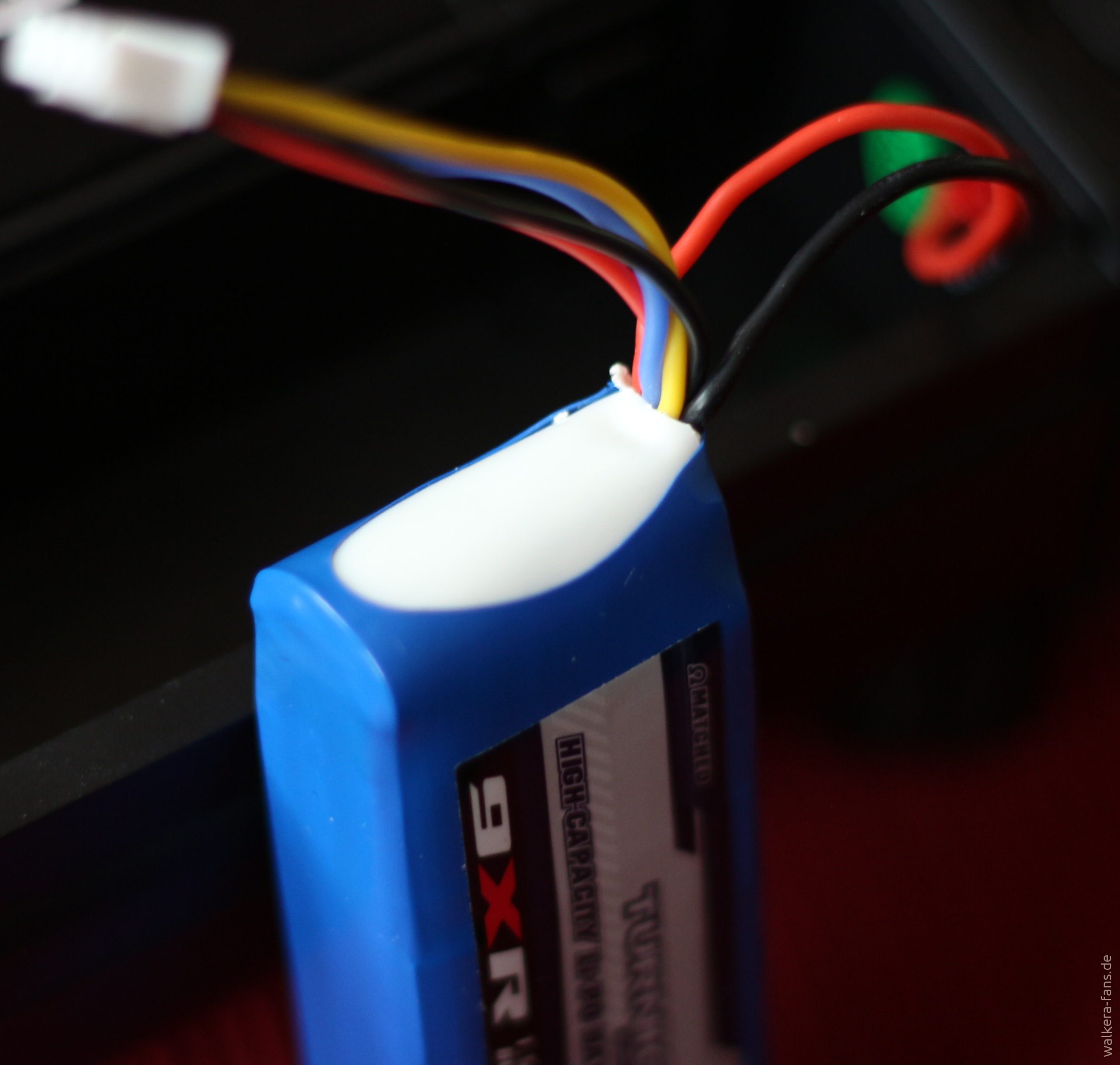
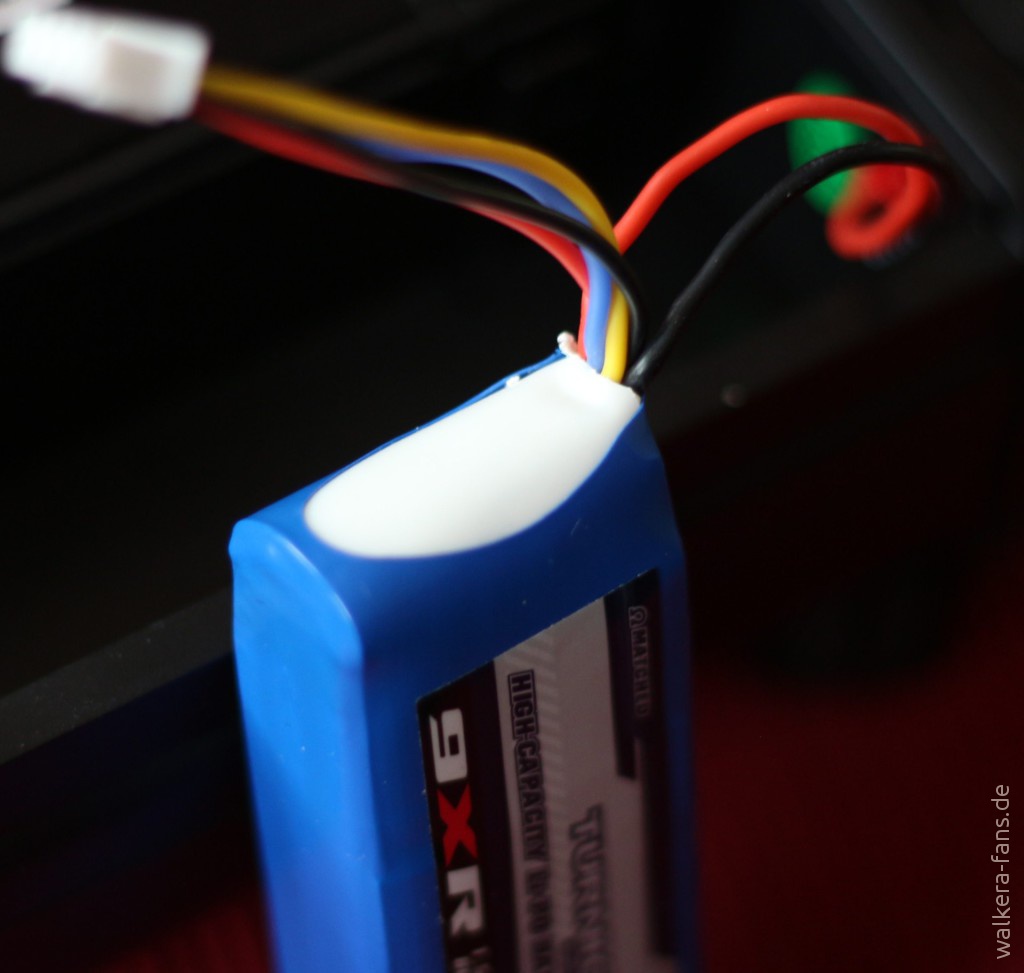
Aktuell nutze ich dieses Exemplar für Devo 7. Der LiPo hat einen Schutz gegen Tiefentladen und Überladen:



Der Akku passt gut in den Schacht von Devo 7 und Devo 10. Man sollte das weiße Material oben etwas abschneiden, damit der Akku wie oben abgebildet flach liegen kann, sonst bekommt man den Deckel etwas schwer zu:
Da die Spannungsanzeige in der Devo 7 und Devo 10 auf Alkali-Batterien ausgelegt ist und keine genaue Spannungswerte liefert, sollte man den Akku lieber etwas zu früh aufladen als zu spät.
Unser User muh2k4 hat sich die Mühe gemacht, die Spannungen bei Devo 7 bei verschiedenen Ladebalken-Anzeigen zu messen:
[====] 12.60V - 11.28V (4.20V - 3.76V Zellenspannung) [ ===] 11.27V - 10,71V (3.75V - 3.57V Zellenspannung) [ ==] < 10.71V
Da der Akku erst bei 3,0V pro Zelle abschaltet (LVC), ist der Betrieb mit dem oben genannten LiPo völlig in Ordnung. Bei der Anzeige von zwei Balken sollte der Akku dennoch bald geladen werden.
Wo finde ich eine Deutsche Bedienungsanleitung für Devo 7 oder Devo 12?
Gut übersetzte Anleitungen findet ihr auf devention.de:
- Direktlink zur PDF: Deutsche Bedienungsanleitung für Devo 7
- Direktlink zur PDF: Deutsche Bedienungsanleitung für Devo 12
Die Funktionen dieser Sender sind ähnlich wie bei Devo 6, Devo 8, Devo 10, Devo F7, Devo F4, etc. Wer einmal das Bedienkonzept verstanden hat, kann alle Devo Sender bedienen.
Ich empfehle, die Anleitung für Devo 12 zu nehmen und die Konzepte auf den eigenen Devo Sender zu übertragen.
Wie baue ich meinen Devo Sender von Mode 1 auf Mode 2 um bzw. wie kann ich meinen Gasknüppel zentrieren wie bei der DJI Phantom Fernsteuerung?
Bei allen Devos kann man jeden Knüppel entweder gefedert oder ungefedert betreiben. Der Umbau ist sehr einfach.
So sieht beispielsweise eine Devo F12E Innen aus.
Hier ist du der Gasknüppel zu sehen:
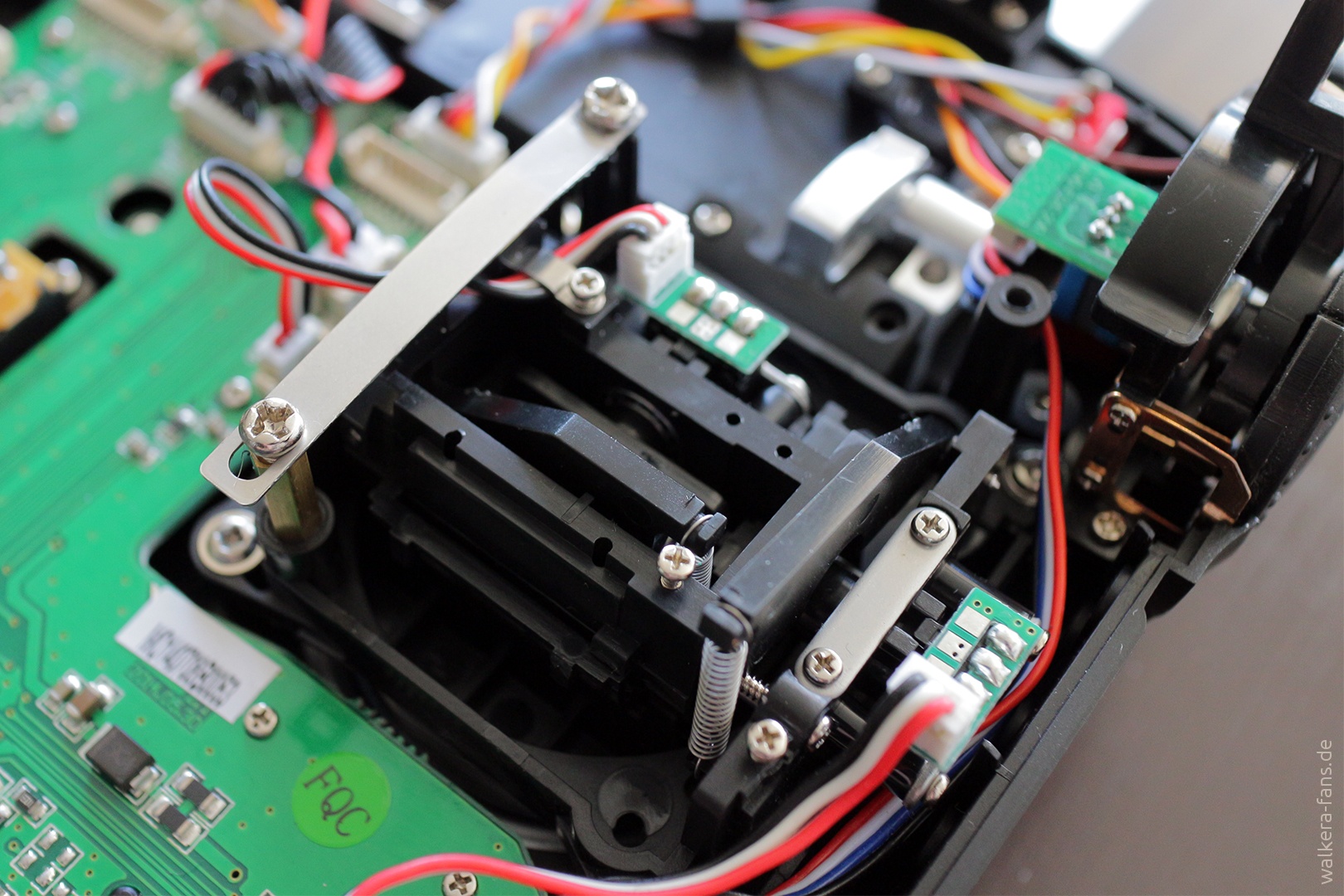

Die Feder wird durch eine seitlich angebrachte Schraube zurückgehaten. Durch das Verstellen der Schraube an dem großen Metallbügel wird die Reibung so eingestellt, dass der Knüppel nicht wackelt, sondern immer stehen bleibt.
Um den Gasknüppel gefedert zu betreiben, muss man also die Schraube lösen und das Metallteil entfernen.
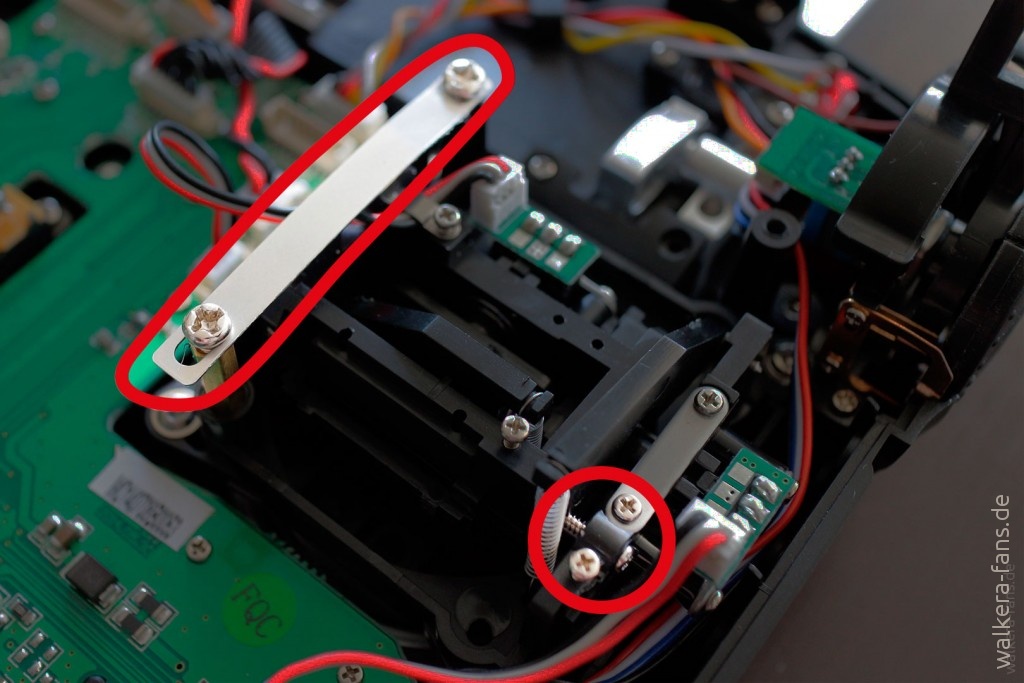
Schraube lösen und Bügel abbauen oder auf die andere Seite umbauen
Wenn man beide Knüppel wie beim der Fernsteuerung des DJI Phantom gefedert haben möchte, genügt das.
Wenn man den Sender auf Mode 1 oder Mode 2, etc. umbauen möchte, kann man den Metallbügel auf den gegenüberliegenden Knüppel montieren und dort die Feder mit der entsprechenden seitlichen Schraube blockieren.
Achtung: Beim Zusammenbau des Senders unbedingt darauf achten, das keine Litzen eingeklemmt werden! Das passiert besonders oft an der Befestigungsstelle unterhalb des GEAR-Schalters!
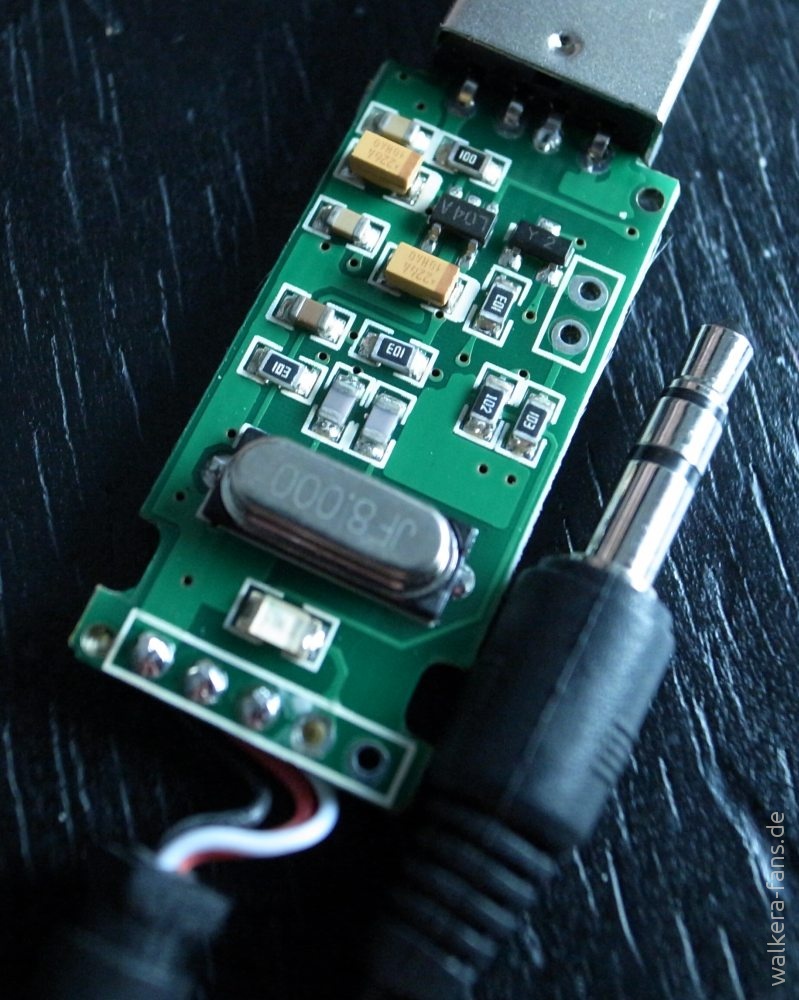
Was ist ein Bind Plug und wie verwende ich ihn?
Der Bind Plug ist ein Servostecker, bei dem äußeren Kabel miteinander verbunden sind.
Im Gegensatz zu Spektrum oder anderen Herstellern, bei denen der Bind Plug zum Binden des Empfängers an den jeweiligen Sender verwendet wird, dient er bei Walkera dem genau entgegengesetztem Zweck.
Bei Walkera Modellen wird der Bind Plug dazu verwendet, die zuvor gesetzte feste ID (also eine feste Bindung an einen bestimmten Sender) aufzuheben.
Zum Löschen der festen ID (fixed ID) steckt man den Bind Plug in den Empfänger-Steckplatz POWER und versorgt den Empfänger mit Strom.
Nach einer kurzen Blinksequenz ist die feste ID gelöscht. Der Empfänger kann nun wie gewohnt mit jedem Devo Sender verwendet werden.
Musst du eine feste ID ohne Plug resettet werden? Man kann sehr vorsichtig mit einer Pinzette oder Büroklammer die zwei äußeren Kontakte am POWER Port des Empfängers kurzschließen. Das macht der Bind Plug auch. Man muss aufpassen, den den mittleren Pol (+) nicht zu erwischen. Das führt zu einem Kurzschluss.
Bitte den Bind Plug nicht mit dem Update Port des X350 verbinden!
Bind Plug und Devo‑M (z.B. X350 Pro)
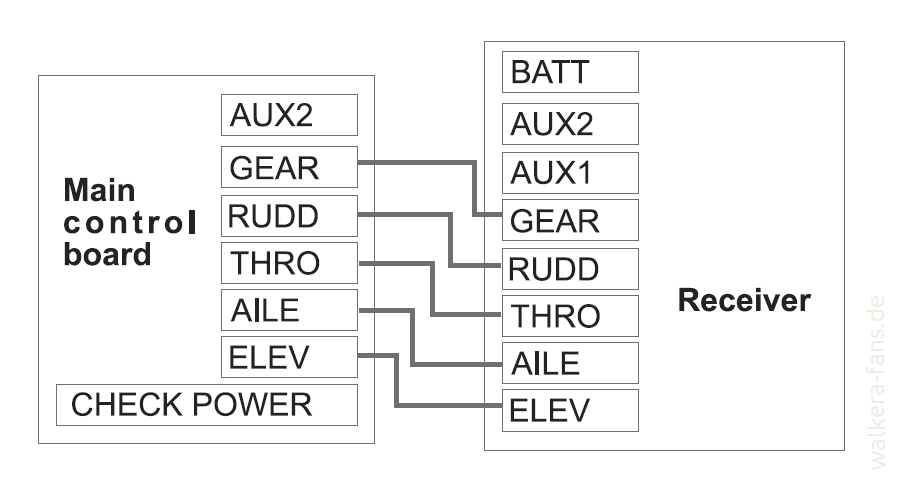
Der Bind Plug wird bei der Flugsteuerung Devo‑M in den Jump Port gesteckt, um den Controller mit einem standard Empfänger (ein Patch Kabel pro Kanal) zu verwenden.
Steckt der Bind Plug im Jump Port, werden die einzelnen Empfänger-Ports verwendet (Elev, Aile, Thro, Rudd, etc.).
Steckt im Jump Port kein Bind Plug, wird der Controller über einen Data Bus Kabel (Summensiglal) vom Empfänger gesteuert.
Mein Devo Sender bindet nicht mit dem Empfänger und geht statt dessen in Trainer Modus. Wieso?
Wenn der Devo Sender beim Einschalten nicht bindet, sondern direkt in den Trainer Modus geht (meist erkennbar an einem kleinen Icon), steckt entweder ein Klinkenstecker in der Trainer-Buchse, oder das Sendemodul ist defekt (meist es der WK-21201RF).
Wie programmiere ich Expo mit Devo 7?
Zum Verstehen und Programmieren deiner Devo 7 empfehle ich diese Software: http://walkera-fans.de/devo-7-modell-editor/
In dem Editor sind die Menüs sind genau so aufgebaut wie die selbigen in dem Sender. Da sieht man du die vollständigen Funktionsbezeichnungen und kann diese nachvollziehen.
Thorsten hat im Vorfeld der Softwareentwicklung dokumentiert, wie die Menüs bei der Devo 7 aufgebaut sind: http://wiki.mikrokopter.de/Devo7
So programmiert man Expo mit der Devo 7:
- ENT drücken
- Zwei mal DN drücken bis FUNCTION blinkt
- ENT drücken
- 3x DN drücken bis DREXP blinkt
- ENT drücken
- Hier kann man den Kanal mit R und L wählen. Du brauchst nur ELEV (Elevator) und AILE (Aileron)
- Für jeden Kanal einmal DN drücken. Da sieht man, welche „Position” du programmierst. Diese Positionen sind Speicherplätze für Expo Voreinstellungen. Bleiben wir mal bei Null.
- Jetzt 2x DN drücken. EXP blinkt. Dort stellt man z.B. +25% ein oder so. Aber nicht ‑25%. Sonst wird das Modell giftiger.
- Weiter unten kann man auswählen, in welchem Modus welche Expo „Position” aktiv ist. Standardmäßig steht alles auf „Switch” Das bedeutet, dass Expo&DR Positionen über den D/R Schalter oben rechts gewählt werden. Und da wir alles auf die Position 0 einprogrammiert haben, kann der Schalter auch dort verbleiben.
Man könnte noch viel mehr machen, z.B. für verschiedene Flugphasen (FMOD Schalter) verschiedene Expo Einstellungen machen, etc. Aber ich denke, die einfache Expo Einstellung dürfte für den Anfang reichen.
Kann man in eine Devo 7 ein Telemetrie Modul einbauen?
Nein, Devo 7 unterstützt als eins der wenigen Walkera Sender keine Telemetrie.
Wie kann ich ein Killswitch einstellen (Throttle Hold), d.h. das bei Schalterstellung 1 das Gas auf 0 steht, unabhängig vom Gashebel?
Devo 7
Menü FUNCTION > THHLD
- STATE: ACT
- POSIT: 0% oder weniger
Devo 8 und andere
Menü Funktionen > Throttle Hold
- Hold Status: Active
- Hold Position: 0% oder weniger
Unter Device Select (Devo 7: Menü Model, Input) kann man aussuchen, welcher Schalter für Throttle Hold zuständig ist. Standardmäßig ist es der RUDD D/R Schalter oben links.
Killswitch ist wichtig, um bei Gefahr die Motoren abzustellen. So entstehen bei einem Absturz weniger Schäden am Modell und der Umgebung.
Wozu?
Ein Killswitch bietet mehr Sicherheit: Man kann jederzeit die Motoren abstellen wenn Gefahr droht.
Man kann die Motoren auch sichern, während man das Modell trägt. Bei großen Koptern ist es aufgrund der eingebauter Motorsperre natürlich nicht mehr so relevant.
Auch Landungen gelingen besser, wenn man ganz kurz vor dem Aufsetzen die Motoren ausschaltet. Das kann man besser mit einem Schalter realisieren als mit einer Stickbewegung.
Einer der wichtigsten Gründe für den Killswitch ist allerdings die Möglichkeit, eine Gaskurve einzustlellen, die bei 6 – 7% Gas beginnt. So können auch im Manuellen Modus die Motoren nicht aus Versehen in der Luft ausgeschaltet werden. Das erneute Anlaufen der Motoren kann manchmal gewisse Zeit in Anspruch nehmen. Die 7% Gaskurve löst dieses Problem und der Killswitch wird zum Starten und Landen verwendet.
Wie kann ich den Countdown-Timer so einstellen, das er nur dann aktiviert wird, wenn das Gas z.B. über 5% liegt?
Devo 7
Bei Devo 7 kann der Timer nicht automatisch aktiviert werden. Bei fast allen anderen Devo Sendern geht das.
Devo 8 und andere
- Zunächst den virtuellen Schalter aktivieren:
Model Menu > Stick Position Switch- Switch: SP0SW
- Channel: Throttle
- Position: L90% für die Aktivierung ab 5% Gas
- On: High (Schalter geht an, wenn Gas nach oben geht)
- Anschließend den Timer mit dem virtuellen Schalter verbinden:
Function Menu > Timer- Timer 1: Countdown
- Switch: SP0 SW
- Set Time: z.B. 9:00
H und L Prozente im Feld Position sind relativ zur Mittelstellung des Knüppels (50%). L90% ist also in dem Fall 5% Throttle, L95% ist 2,5% und so weiter. (Danke an User Ratzfatz für den Hinweis!)
Siehe auch unseren Artikel „Timer mit dem Gasknüppel verknüpfen am Beispiel von Devo F7″.
Welche Devo Empfänger gibt es und zu welchen Sendern passen sie?
Es gibt zum einen Empfänger mit PPM Signal, die in den Multikoptern von Walkera mit Arducopter Flugsteuerung eingesetzt werden und zum anderen die klassischen PWM Modellbau Empfänger, die sich entweder für ältere Modelle eignen oder für die Eigenbauten.
PPM Empfänger
Die PPM (Puls-Pausen-Modulation) Empfänger haben immer einen Data Bus Kanal, der die ersten sechs Kanäle an die Flugsteuerung überträgt.
Hierzu zählen folgende Empfänger:
- RX703 (X350 Pro, älter)
- RX703A (X350 Pro, neu)
- RX705 (Tali H500, mit Telemetrie, CE)
- RX707 (Scout X4, mit Telemetrie, CE)
- RX709 (Scout X4, mit Telemetrie, FCC)
Die weiteren Kanäle kommen als Standard PWM heraus und können unterschiedlich belegt sein (so wie bei RX703 und RX703A, bei den neueren Empfängern sind AUX1-AUX7 rausgeführt):

PWM Empfänger
Die PWM (Pulsweitenmodulation) Empfänger haben für jeden Kanal einen Anschluss:
Hierzu zählen folgende Empfänger:
- RX-601
- RX-701
- RX-801 (kurze Antennen)
- RX-802 (lange Antennen)
- RX-1002
- RX-1201 (kurze Antennen)
- RX-1202 (lange Antennen)
Die Zahl am Anfang bedeutet die Anzahl der Kanäle.
Die Empfänger sind immer Aufwärtskompatibel. Sprich, mit der Devo 12 kann man alle Empfänger sinnvoll steuern, mit der Devo 6 nur den RX-601.
Um ein Modell mit PWM Eingängen, z.B. Auto, Boot, etc. mit einer Devo Funkfernsteuerung sinnvoll zu lenken braucht man einen passenden PWM Empfänger.
Ich komme mit dem Interface von Devo 7 nicht zurecht. Was bedeutet das alles? Kann ich den Sender einfacher einstellen?
Im Mikrokopter Wiki findet ihr eine Übersicht über die Devo 7 Menüstruktur mit Erklärungen zu einzelnen Funktionen. Insbesondere sind Kapitel zu Dual Rate und Expo sowie Throttle Curve inreressant.
Thorsten hat zudem ein Programm geschrieben, mit dessen Hilfe man alle Einstellungen der Devo 7 am PC vornehmen kann: Devo 7 Modell Editor.
Anschließend können die Einstellungen mit Hilfe des UP02 Adapters auf den Sender übertragen werden.
Was ist der Lehrer-Schüler Modus und welche Walkera Sender kann ich dafür nutzen?
Im Lehrer-Schüler Modus werden, meist zu Schulungszwecken, zwei Sender verwendet.
Der Lehrersender steuert das Modell und ist per Funk mit dem Modell verbunden. Der Schülersender ist per Kabel mit dem Lehrersender verbunden. Der Lehrer kann dem Schüler einzelne Steuerelemente wie z.B. Gas, Rudder, Nick, Roll etc. übergeben und bei Gefahr schnell wieder entziehen, um die Steuerung selbst zu übernehmen.
Man kann diesen Modus auch nutzen, um die Steuerung des Kopters zu verteilen. Eine Person pilotiert den Kopter und die andere kümmert sich um die Kamera, zum Beispiel.
Auch für den FPV Headtracker ist die Lehrer-Schüler Funktion wichtig. Der Headtracker wird zum „Schüler” und erhält – ähnlich wie im Beispiel zuvor – die Kontrolle über das Gimbal der Kamera.
Im Prinzip sollten alle Devos miteinander im Lehrer-Schüler Modus funktionieren. Die Kompatibilität zu anderen Sendern, z.B. WK-2801 wird noch geprüft.
Voraussetzungen
- Die Sender werden mit dem beiliegenden Mono-Klinkenkabel über die DSC Buchse verbunden.
- Beide Sender sollten idealerweise die gleichen Modelleinstellungen aufweisen, bei gleichen Sendern kann man die Einstellungen drahtlos kopieren. Hier teste ich noch die Kompatibilität verschiedener Devos.
- Der Lehrer-Sender muss in den Modelleinstellungen im Menüpunkt Trainer die entsprechenden Kanäle freigegeben haben (Menüpunkt Trainer, gewünschte Kanäle aktivieren). Man kann dem Schüler z.B. alle Kanäle außer Pitch überlassen.
Vorgehensweise zur Verbindung
- Der Sender, der als erstes eingeschaltet wird ist der Schüler.
Zunächst den Schülersender einschalten. - Ser Sender, der anschließend eingeschaltet wird ist der Lehrer.
Den Lehrersender einschalten. - Am Lehrersender gibt es einen Trim oder Schalter, der für die Freigabe und Wegnahme der Kontrolle auf den freigegebenen Kanälen sorgt. Bei Devo 8 ist es der obere rechte Trim (neben dem MIX-Schalter), bei der Devo 7 ist es der RUDD-DR-Schalter oben-links.
Den Schalter betätigen, um dem Schüler die Kontrolle zu übergeben oder zu entziehen.
Folgende Senderkombinationen habe ich erfolgreich ausprobiert:
Lehrer: Devo 8S
Schüler: Devo 12S, Devo 10, Devo 7
Mein Lieblingssender für den Lehrer-Schüler Betrieb ist die Devo 7, da die Übergabe der Controls über den RUDD-DR-Schalttaster sehr bequem ist.
Kann ich die Telemetrieeinstellungen im Modelldatensatz speichern?
Ich habe bei meiner Devo 8S am hinteren Deckel einen Aufkleber mit meinen Telemetrie-Alarm Begrenzungen angebracht. Folgende Grenzen stehen drauf. Diese muss ich immer per Hand nachstellen, je nach Modell:
- 1S: 3,4V
- 2S: 6,8V
- 3S: 10,2V
Diese Spannungen ergeben sich natürlich unter Last. So tief sollte man den im Ruhezustand befindlichen Akku natürlich nie entladen.
Upgrade Tools (1)
Die Firmwareversion meines Senders / meines Modells wird in UP02 Tools falsch angezeigt. Wieso?
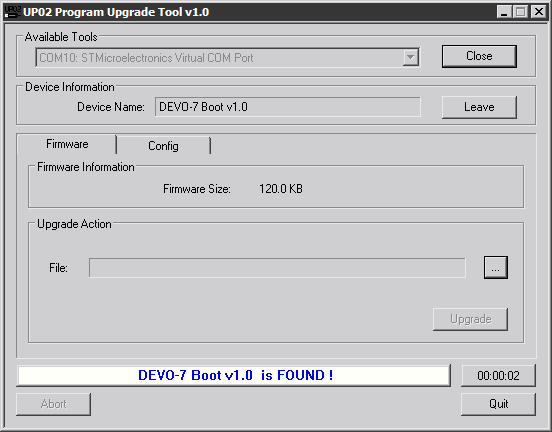
Die unten angezeigte Version ist nicht die Firmware Version, sondern die Version des so genannten Bootloaders. Diese bleibt immer gleich.
Auf dem Screenshot oben seht ihr den mit dem PC verbundenen Sender Devo 7. Auf dem Sender ist die Firmwareversion 0.5 installiert. Unten wird die Bootloader-Version 1.0 angezeigt. Diese bleibt unabhängig von der installierten Firmware gleich.
E‑Eyes GPS Flugzeug (1)
Motor beim E‑Eyes GPS Flugzeug aktivieren
Entgegen des Quickstart-Guides wird der Motor nicht durch das Kommando „Throttle nach links Unten” wie beim QR X350 aktiviert.
Stattdessen müssen beide Sticks nach Unten Innen geführt werden und zum deaktivieren beide nach Unten Außen.
iLook+ (4)
Kann ich das Datum und die Uhrzeit bei der iLook+ einstellen?
Alle iLook+ Videodateien und Fotos haben ein Zeitstempel von 1999 oder Ähnliches.
Das Datum und die Uhrzeit können leider nicht eingestellt werden.
Eigentlich ist es auch logisch, denn die Kamera hat keine interne Stromversorgung, die man für eine Uhr bräuchte.
Wie kann ich die Micro SD Karte in meiner iLook Kamera formatieren?
Wenn die Aufnahme nicht funktioniert, kann es sein, dass die Karte nicht kompatibel formatiert ist und in der Kamera formatiert werden muss.
Dazu muss die Kamera im Video Modus eingeschaltet sein und die SD karte eingelegt sein.
Jetzt den Auslöser für ca. 5 Sekunden gedrückt halten.
Die Formatierung beginnt. Abwarten.
Anschließend die Kamera kurz abklemmen und dann sollte es mit der Aufnahme auch wieder klappen.
Da man mit längerem Halten des Auslöseknopfes die SD Karte formatiert (und hiermit die vorhandenen Daten löscht), sollte man beim Auslösen nicht zu lange drauf drücken.
Wieso habe ich schlechte Reichweite mit iLook+ FCC und dem Empfänger meiner FatShark Brille?
Die ilook+ FCC (USA Version, Betrieb nur in Ausland!) kennt acht Kanäle mit den folgenden Frequenzen:
- Kanal 1: 5866 MHz
- Kanal 2: 5847 MHz
- Kanal 3: 5828 MHz
- Kanal 4: 5809 MHz
- Kanal 5: 5790 MHz
- Kanal 6: 5771 MHz
- Kanal 7: 5752 MHz
- Kanal 8: 5733 MHz
Nachfolgend die richtigen Einstellungen für ein 32-Kanal Empfangsgerät (auch hier 1 bis 8 passend zu iLook+):
- B8 B7 B6 B5 B4 B3 B2 B1
Fatshark 8‑Kanal Empfänger sind meines Wissens nicht ordentlich mit der iLook+ verwendbar weil einfach keine Frequenz passt. (Ungetestet, nur angelesen).
Wenn obiges nicht genau beachtet wird und ihr euch auf den automatischen Suchlauf verlasst, kann es passieren, dass ihr z. B. eure iLook+ auf Kanal 6 stellt und auf dem Empfänger A6 erkannt wird.
Kanal 6 = 5771 MHz und A6 = 5765 MHz. Klappt super, aber die Reichweite kann halbiert sein. B3 wäre korrekt.
Das beste unter den schlechten Ergebnissen zwischen iLook+ und Fatshark erzielt man auf iLook+ Kanal 1 (5866 MHz) und Fatshark Kanal 7 (5860 MHz).
Des weiteren: Die normalerweise mitgelieferten Empfängerantennen (Stab) sind für die Ilook+ Sendeantenne völlig ungeeignet.
Was ihr dafür braucht ist eine left hand Cloverleaf rx antenne.
Beitrag von User Ratzfatz
Wie heißen die Stecker, die in vielen aktuellen Walkera Modellen im Inneren und bei der iLook verwendet werden (Kompass, GPS, etc.)?
Bei den neueren Walkera Modellen (2014 und spätere) kommen Stecker mit Sicherungsklemme zum Einsatz.
Die Steckverbinder heißen JST GH, Raster 1,25mm, 4‑polig (GHR-04V‑S).
Dazu passen JST Crimpverbinder der Serie SSHL (SSHL-002T-P0.2).
Hubschrauber (1)
Was ist der Einstellmodus bei einem Heli und wofür brauche ich ihn?
Bei einem Flybarless Heli arbeitet die Stabi-Einheit immer mit und bewegt manchmnal auch auf der Werkbank die Taumelscheibe in eine schiefe Lage, um den Heli wieder „auf Kurs zu bringen”. Das möchte man nicht haben, wenn man z.B. nach dem Servowechsel die Servoarme wieder anschraubt. Was man wissen muss, ist die genaue Servomitte. Sonst schraubt man die Anlenkung völlig verkehrt an und die Taumelscheibe steht schief.
Hier schafft der Einstellmodus Abhilfe. Die Gyros werden vollständig abgeschaltet und die Taumelscheibe kann mit der Fernsteuerung proportional gesteuert werden.
Die Taumelscheibe sollte in diesem Modus waagerecht stehen.
Einstellen kann man das durch das abklemmen von den Anlenkungen und das drehen der selbigen. Sie haben innen ein Gewinde und können so in ihrer Länge verstellt werden.
In aller Regel sind die Helis von Walkera ab Werk gut eingestellt.
Meist wird der Einstellmodus über einen bestimmten Wert des Gyro Kanals aufgerufen. Meistens ist das ‑100 oder jeder Wert unter 0.
APM:Copter (2)
Sollte man beim Walkera QR X350 Pro und anderen den Kompass vor jedem Flug in derselben Region kalibrieren?
Kurze Antwort: Nein.
Das Häufige Kalibrieren ist nicht nur nervig: Es kann sogar problematisch sein. Wenn die Kalibrierung aus irgendeinem Grund schief läuft, ist sie vielleicht schlechter als die Vorherige. Die Genauigkait von Kalibrierungsdaten kann sehr verschieden sein.
Auch der Hersteller empfiehlt, nur dann zu kalibrieren, wenn man seine Position um mehrere Hundert Kilometer ändert. Die magnetische Deklination ist für diese Empfehlung verantwortlich.
Wenn man bauliche Veränderungen vorgenommen hat oder der Kopter im GPS Modus komisch fliegt, sollte man eine Kompasskalibrierung wagen. Ansonsten ist es eher kontraproduktiv und nervig.
Ich kalibriere meine Walkeras (und auch DJIs, MultiWiis, etc.) einmal ordentlich und dann nie wieder. Vielleicht nach Software Updates oder wenn ich in einem weit entfernten Gebiet fliege (über 300 km weit weg von der letzten Stelle).
Dieser Ratschlag gilt für alle Kopter mit GPS.
Die neueren Walkera Kopter (ab 2014) arbeiten mit der Arducopter Firmware. Diese kalibriert den Kompass während des GPS Fluges auf Basis der GPS Daten. Diese Feinkalibrierung zerstört man, wenn man manuell kalibriert.
Die automatische Korrektur greift recht schnell. Vor allem wenn man den Kopter nicht bloß auf der Stelle schweben lässt, sondern etwas im GPS Modus in verschiedene Richtungen geradeaus fliegt.
Man merkt eigentlich recht schnell, wenn der Kompass völlig falsch kalibriert ist oder eine sonstige grobe Fehlfunktion zeigt. Der Kopter fängt an im GPS Modus abzuhauen. Entweder fängt er sich aufgrund der automatischen Kalibrierung wieder, oder man schaltet wieder in den manuellen Modus und muss am Boden kalibrieren.
Wie konfiguriere ich meinen X350 Pro und andere Walkera Modelle?
Man kann den APM Mission Planner nutzen.
Tali H500 (1)
Wie heißen die Stecker, die in vielen aktuellen Walkera Modellen im Inneren und bei der iLook verwendet werden (Kompass, GPS, etc.)?
Bei den neueren Walkera Modellen (2014 und spätere) kommen Stecker mit Sicherungsklemme zum Einsatz.
Die Steckverbinder heißen JST GH, Raster 1,25mm, 4‑polig (GHR-04V‑S).
Dazu passen JST Crimpverbinder der Serie SSHL (SSHL-002T-P0.2).
Scout X4 (1)
Wie heißen die Stecker, die in vielen aktuellen Walkera Modellen im Inneren und bei der iLook verwendet werden (Kompass, GPS, etc.)?
Bei den neueren Walkera Modellen (2014 und spätere) kommen Stecker mit Sicherungsklemme zum Einsatz.
Die Steckverbinder heißen JST GH, Raster 1,25mm, 4‑polig (GHR-04V‑S).
Dazu passen JST Crimpverbinder der Serie SSHL (SSHL-002T-P0.2).
FPV (1)
Die Kamera hat eine Auflösung von 800TVL. Was bedeutet das?
TVL steht für Television lines. Das ist ein Begriff aus dem analogen Zeitalter. Ohne Pixel ist es wirklich schwer, Auflösung zu definieren. Bei TVL definiert man die Menge der noch klar unterscheidbaren schwarzen und weißen Linien auf einer definierten Bildfläche.
800 TVL ist eine gute Auflösung für eine FPV Kamera, aber die Signalübertragung ist ja analog und je nach dem hat man so wie so entweder PAL (625 Linien) oder NTSC (525 Linien).
Wenn man das Ganze sehr wohlwollend in das digitale Zeitalter und die Pixel umrechnet, kommt eine 800 TVL der HD Auflösung von 1280×720 nicht unbedingt nahe (immer die Zahl der horizontalen Linien schauen, also 800 vs. 1280). Full HD (1920×1080) bleibt erst recht in weiter Ferne. Und die analoge Signalübertragung ist natürlich auch nicht perfekt, was sein Übriges tut.
Wie auch immer: Über ein Bild, das ein Bisschen wie im Omas Fernsehgerät aussieht sollte man sich beim aktuell üblichen (2015) analogen FPV Equipment nicht wundern. Das ist der Preis, den man für eine quasi sofortige Bildübertragung zahlt. Beim FPV Flug ist jede Verzögerung Gift und die digitalen Systeme sind noch nicht so schnell.
G‑2D Gimbal (2)
Was ist der Unterschied zwischen den RX-703 und RX-703A Empfängern für X350 Pro? Kann ich RX-703 mit Devo F7 nutzen?
RX-703 ist ein 10-Kanal Empfänger und ist z.B. für Devo 10 geeignet. Die Kanäle AUX 3, 4 und AUX 5 werden nach Außen geleitet um z.B. das G‑2D Gimbal zu steuern.
RX-703 funktioniert zwar grundsätzlich mit Devo F7 und der Kopter fliegt damit gut, es werden aber nur die ersten sieben Kanäle angesteuert. AUX 3, 4 und 5 kann man mit Devo F7 nicht ansprechen. Somit kann man G‑2D damit nicht ansteuern.
Devo 8 könnte z.B. den achten Kanal AUX 8 ansteuern und passt daher bedingt zum RX703. Für G‑2D braucht man so wie so nur einen Kanal für die Nick-Achse.
RX-703A ist ein 7‑Kanal Empfnger. Man kann AUX2 nach Außen leiten und damit z.B. die Nick-Achse des G‑2D Gimbal steuern. Der Empfänger RX-703A ist für Devo F7 geeigneter.
Siehe auch: Wie sind die Standard Kanäle bei Walkera Devo Sendern verteilt?
Was macht beim G‑2D der Schalter SW? Was sind Position Mode und Stick Rate Mode?
Position Mode (Position 1) ist Standard. Achse des Gimbals nimmt die absolute Position des Kanals an.
Wenn man das Nick Poti z.B. auf 25% nach rechts dreht, neigt sich die Kamera 25% nach unten.

G‑2D ist im Position Mode (Standard)
Stick Rate Mode (Position 0) ist für die Steuerung über die Knüppel eines zweiten Senders konzipiert und ist relativ-proportional.
Man kann z.B. den Nick Kanal auf einen normalen Knüppel wie z.B. den Nick Stick legen. Durch das Betätigen des Knüppels nach vorne neigt sich die Kamera ein Wenig nach unten. Solange man den Knüppel weiter betätigt, neigt sich die Kamera immer mehr, proportional zu dem Ausschlag des Knüppels. Lässt man los, behält die Kamera die Position bei.
Keine Antwort gefunden? Frage Walkerafans!
Bitte beachte, dass wir (WF1 und WF2) leider nicht immer Zeit haben, deine Anfragen persönlich zu beantworten. Stelle deine Frage deshalb am besten in unserem Forum. Dort sind viele Walkerafans unterwegs, die dir bestimmt gerne weiterhelfen.
Und teile uns auch auch mal deine Lösungen mit. Dann veröffentlichen wir sie hier.
Gibt es schon gute und neue Einstellungen für den X350pro mit Devo 8 (8S)?
Noch nicht. Wir fliegen den X350 Pro derzeit mit der mitgelieferten weißen Devo 10. Ich habe nur ein Wenig Expo auf der Gierachse eingestellt, damit die Videos sanftere Schwenks haben.
Auf http://www.deviationtx.com/ gibt es eine alternative Firmware, bei der das ohne Probleme geht. ich finde die Einstellungen auch deutlicher gegliedert als bei der Originalfirmware. Ich setzte die Firmware seit mehr als einem Jahr ein. Auch DSMx und Walkere geht zusätzlich zu devention vom Protokoll her. Meine 2801 ist bereits verkauft.
Guter Punkt! Die Firmware kennen wir, ein Artikel darüber ist in Vorbereitung. Dennoch möchte ich eine Warnung aussprechen: Gegebenenfalls könnte es in bestimmten Fällen durch diese tiefgreifende Veränderung der Software der Sendeanlage Probleme mit der Modellhaftpflichtversicherung geben. DMFV hat das betont.
Ok, das war mir nicht bekannt. Die Alternativfirmware ist allerdings so gut, dass Walkera sich ne Scheibe davon abschneiden sollte, mindestens was die Menüführung angeht, ebenso bei den modellspezifischen Einstellungen. Ich finde die Einstellmöglichkeiten erheblich transparenter als bei der original-Firmware. Leider gibt’s noch keine für die F7.… Ebenso sollten sie ihr eigenes altes Protokoll unterstützen und mehr Speicherplätze anbieten.
Ich bin gespannt auf den Artikel!
Danke!
KALIBRIERUNG – wann ausführen? beim QR X350
hallo, es gibt unterschiedliche meinungen zur kompasskalibrierung (360-grad drehungen),
die einen meinen, nur einmal, außer man fliegt viele kilometer weg an anderen plätzen, andere vor jedem flugtag auch wenn das fluggelände gleich bleibt.
ich selber kalibriere jedes mal neu.
vg. alf
Hallo liebe Walkera Fans,
Walkera infizierter bräuchte bitte dringend Infos bezüglich folgender Walkera Sender : WK2603 und Devo 7
Da ich nun auf Flugzeuge umgestiegen bin … Asche über mein Haupt …
möchte ich mir gerne eine neue Fernsteuerung kaufen.
Die mitgelieferten RTF Funken gefallen mir einfach nicht 😉
Ich liebe meinen WK 2402 Sender vom CB180Z und CB100 doch leider ist dieser mit 10mW zu schwach und Empfänger für Flugzeuge gibts dafür meines Wissens auch nicht 🙁
Bitte nicht auslachen … aber optisch am besten würde mir dann der WK2603 gefallen …
Ich weiß auch das die WK2603 Sender am aussterben bzw. beinahe ausgestorben sind aber optisch, rein vom Design, finde ich diese immer noch am schönsten.
Ausgenommen die neue „Predator Waffe” DEVO 12s – was für ein geniales Teil 🙂
Bin aber ein reiner „Sonntagsflieger” und möchte es so einfach wie möglich.
Kein Kunstflug, keine Telemetrie und kein FPV etc. – nur mit 4 Kanäle max. 6 ganz gemütlich durch die Lüfte cruisen. (Waco II REELY vom großen „C” oder meiner ART TECH J3 Piper Cub)
Da ich einige negative Berichte bezügl. Reichweite vom WK2603 aber auch über die Devo7 gelesen habe, wäre mir speziell Eure Meinung darüber sehr, sehr wichtig.
Eure Meinung ist sozusagen, welche für mich entscheidend sein wird.
Nun aber zu meinen Fragen:
Wäre es möglich mit einem WK2603 Sender in Verbidung mit z.B. einem RX-2608 Empfänger ein 1m Elektro Flugzeug bezüglich Reichweite sicher zu steuern ?
Wie weit wäre etwa die Reichweite ?
WK2603 sendet angeblich mit 100mW
RX-2608 Empfänger hätte ich dann gleich mehrere sozusagen auf Vorrat bestellt, bevor sie gänzlich vom Markt verschwunden sind 😉
*Anmerkung*
Bei meiner REELY WACO II RTF vom großen „C” wurde ein „REELY Sender” -
Modelcraft 2,4 G‑01T-VI Hand-Fernsteuerung 2.4 GHz Anzahl Kanäle: 4
mitgeliefert, welcher laut Beschreibung eine Reichweite von 450m haben soll.
Habe es jedoch noch nicht geprüft. *Anmerkung Ende*
Die Devo 7 wäre sozusagen mein Plan B
Wie groß wäre bei der Devo 7 die Reichweite ?
Habe mächtig Angst vor Kontrollverlust bezüglich Reichweite.
Vielen herzlichen Dank und auf Antwort hoffend …
Sonnige Grüße
Manfred
Hallo Liebe Gemeinde von Walkera… ( H I L F E )
bin leider neu, was die Branche Modellbau und Quadrocopoter angeht..
Habe mir den qr x350 PRo +Devo f7 mit g2 Gimbal zugelegt..
Wie es für meine Eigenschaft üblich ist, habe ich sofort nach dem auspacken erstmals an der FB rumgespielt. Mit dem Resultat, das ich wahrscheinlich einiges verstellt haben könnte.
Habe mit auf den Qr x350Pro mal die Firmwarre 1.7
http://walkera-fans.de/aktuelle-firmware-versionen-von-walkera-stand-03 – 2015/
und auf der Devo f7 die 0.6b Version drauf getan.
http://walkera-fans.de/devo-f7-firmware‑0 – 6b/
Da ich auf der FB so einiges verstellt haben könnte, dachte ich, ich lade mal die Datei, von hier, für den qr x 350 pro auf meine Devo..
„x350 Pro Devo F7.bin“
http://walkera-fans.de/downloads/
Beim Erstflug ging das Ding von ganz alleine hoch, schwebte dann über mir (so ungefähr ‚mit starkem Wind) und kam langsam wieder in meine Richtung nach unten. Zum Glück konnte ich Ihn in der Luft am Fuß packen und die Motoren abstellen. Nach einem nochmaligem Versuch bekam ich Ihn zwar hoch und er lies sich auch rechts links vorne hinten steuern, aber das Gas reagierte nicht Direkt und genau..
Bekam in aber heil runter.
Nun probiere ich Ihn dauernd am Boden zu testen. Dabei halte ich Ihn fest und teste das Gas geben um dann zu schauen, wie schnell er darauf reagiert. Habe festgestellt, dass er erst bei ca 40% Leistung anfängt zu reagieren. bei 56% steuern die Motoren kurz sehr hoch aber dann wieder etwas weniger. Mein Eindruck ist, das der Gashebel nicht Synchron mit der Reaktion vom QuadroCopter übereinstimmt. Hoffe habe mein Problem nicht zu blöd erklärt-
Meine Frage.
Was könnte ich verstellt haben?
Passt vielleicht die Firmware nicht …. ?
Gibt es nicht eine Möglichkeit die „devof7“ wieder kompl. In Werkseinstellung zu setzten.?
Bin echt am verzweifeln..
Hier ein kleines Video wie es sich verhält..
https://www.youtube.com/watch?v=MlIrl7Lh2TA
Vielleicht weiss ja jemand wa ich falsch mache…
Im Vorfeld , 100 Dank
Gruss Ralph (kuenax847)
Inforalph@web.de
H I L F E Walkera Devo 8S geht nicht fuer unbinding und binding nicht.
nicht genug mit Walkera CP Master das selbe Problem. Mit dem Devo 8s
fliege ich ohne Probleme V120 D02 und Mini CP. Ich verstehe ueberhaupt
nichts mehr. Der Devvo 8s hat alle Daten vom Cp Master und V450 D03
eingestellt.. CP Master RX 2703H‑D V450 R2703H‑D Es waee sehr nett
wenn mir jemand weiter helfen koennte. Wohne in Spanien . VLG Frank Engel
Hallo
Mir ist bei dem Binden von Devo7 und Empfänger RX701 ein Problem aufgetreten. Die Bindung hat funktioniert aber der Motor teuft bei meinem Flugzeug nur auf volle Leistung ‚wenn ich den GEAR Schalter betätige der Trottel Stick hat keine Funktion.
Ich habe einen weiteren Emfänger gebunden den RX1002 da habe ich das selbe Problem.
Muss ich das Umprogrammieren aber wie ?
Kann mir einer von den Pro´s kurz und knapp den Unterschied zwischen 250 Runner Pro und 250 Runner Advanced erklären ???
Grüße,
Sierra Lima
P.S.: Witzig, „per aspera ad astra” ist mein Whatsapp-Profil-Status 😀