Ich habe angefangen, den Rodeo 110 zu tunen. Dies ist der Zwischenstand.
Inhalt
Disclaimer
Mit „Zwischenstand” meine ich, dass diese Einstellung zwar schon ganz gut fliegt, ich aber noch überhaupt nicht getestet habe, ob es beim harten Fliegen doch noch Probleme gibt wie z.B. Oszillationen, die die ESCs überlasten.
Betaflight 3.1.0
Auch der Rodeo 110 lässt sich auf Betaflight flashen. Ich verwende natürlich die aktuelle Version 3.1.0.
Gleiche Einstellungen zum Flashen wie beim F210:
- Manual Baud Rate 256000
- SPRF3 Target
Menü „Configuration”
Die Einstellungen sind die gleichen wie bei meinen F210 Tunings.
Die ESCs werden mit OneShot125 angesprochen.
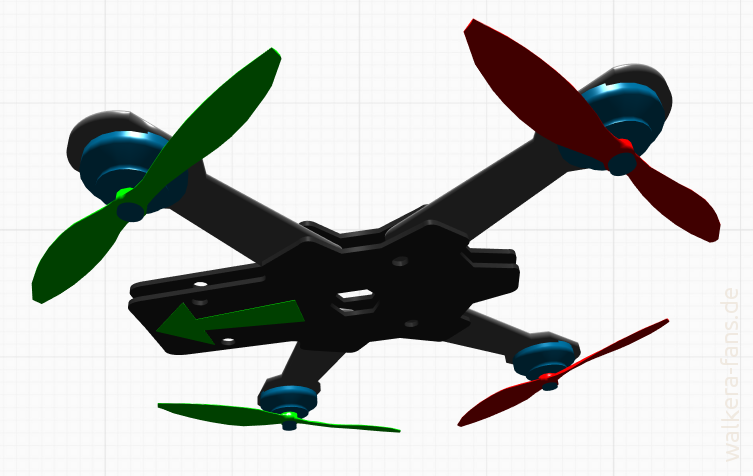
Die Ausrichtung der Flugsteuerung ist Yaw 180°.
Als Gyro Update Frequency und PID loop frequency wählen wir jeweils 2,67kHz (entspricht Looptime 375µs).
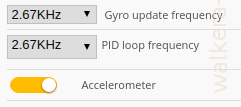
Accelerometer darf aktiviert bleiben.
Ich empfehle Airmode dauerhaft zu aktivieren.
PID Werte
Die mit 0 beginnende Versionsnummer deutet an, dass ich diesmal keine ausgiebigen Testflüge durchführen konnte. Ich gehe davon aus, dass das Optimierungspotenzial etwas größer ist als sonst. Keine Sorge, das Flugverhalten ist trotzdem weit besser als mit Standardwerten.
| Roll | 58 | 40 | 22 |
| Pitch | 63 | 50 | 24 |
| Yaw | 70 | 45 | 0 |
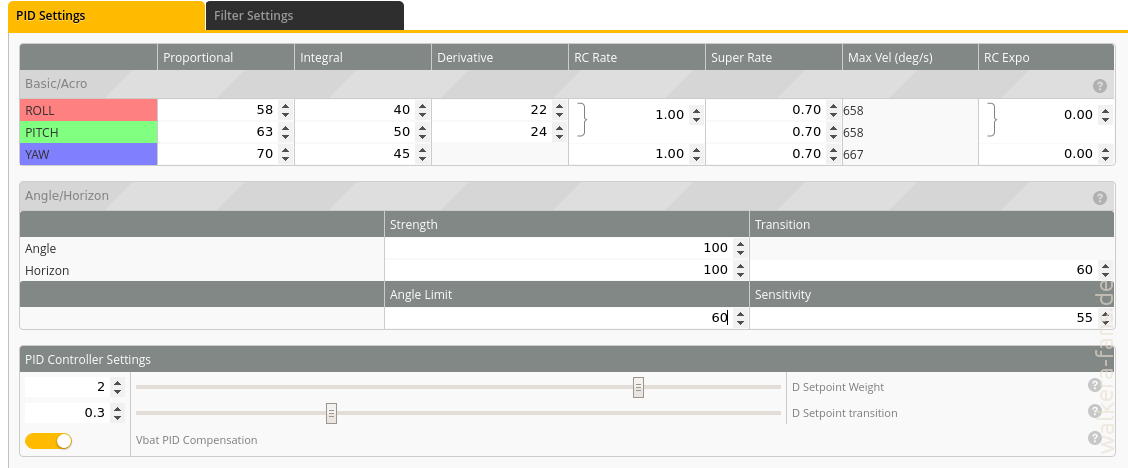
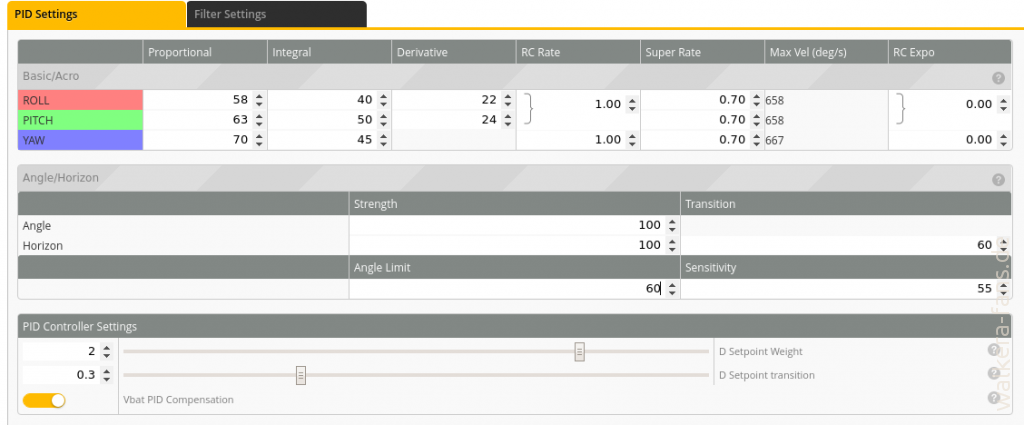
TPA habe ich bei den Standardwerten belassen. Angle und Horizon sind mit Strength 100, wie bei mir üblich, auf besonders direktes Ansprechverhalten eingestellt. Das perfekte Angle Limit muss noch gefunden werden. 60° ist nach Gefühl geraten.
Fazit & Ausblick
Der Rodeo 110 hat mich beim Tunen begeistert. Es ging soweit erstaunlich einfach. Das spricht für eine gelungene mechanische Konstruktion, die günstige Flugphysik hat, und keine Resonanzen auf das Gyro überträgt. Sobald sich die Gelegenheit für den letzten Feinschliff ergibt, arbeitet die Elektronik dann hoffentlich genausogut und wir haben hier einen hervorragenden Mini-Racer für kleines Geld.
Hello, I have a bind to get out of! I flashed spracingf3evo by accident instead of spracingf3! I tried to flash back to original form but when I flash boot loader fails to read now! How do I get back or get this quad into bootloader mode? I don’t see any pins on the FC? Can this be fixed? Please help! Thanks!
Maybe this video can help.
https://www.youtube.com/watch?v=hP4vCb1DiPE
Hallo nVentor,
vielen Dank für die Settings. Funzen ganz gut und sind klar besser als die OOTB.
Bin sie mit 3.1.0 geflogen, als auch mit 3.1.5 (welche nochmal minimale Updates bei den PID Algos beinhaltet).
Um das gebounce beim Landen mit dem Airmode zu vermeiden, habe ich mir im Betaflight einfach noch einen zus. Mode definiert, an der Devo10 den RDD‑D/R Schalter auf AUX‑2 gelegt (gut mit dem linken Zeigefinger zu erreichen, ohne suchen zu müssen) und so kann der AM jederzeit während des Fluges on/off geknipst werden 🙂
Danke und Grüsse !
Hey inventor
I haven’t used your settings, as I had already put bet flight on my Rodeo 150 and used the same config.
However, I will try out your PID settings when the weather gets better here in Denmark 😉
You can load BLHELI with multishot onto the ESC’s if you use an Arduino board, it really makes a difference 😉
Ich hatte heute ein wenig mit den PID- Einstellungen herum experimentiert. Da ich diese nicht einfach übernehmen wollte, habe ich erst einmal selbst ausprobiert..
Zum Schluss bin ich dann aber überwiegend bei obigen Einstellungen gelandet und habe diese übernommen- vielen Dank.
Mein Rodeo 110 fliegt nun echt gut- Daumen hoch! 😉
Hoihoi, ich habe mir auch mal deine Einstelungen übernommen. Jetzt habe ich aber beim starten/landen so ein starkes „bouncen”, erhüpft mehrmals auf und ab. Welche Einstellung ist hierfür verantwortlich? Oder habe ich evtl etwas vergessen?
Das ist der air mode
Den kannst du die auf einen Schalter legen bei Modi und dann kannst du den beim landen ausschalten
Dann wird er auch nicht mehr bouncen
Ich muss leider sagen, das diese PID-Einstellungen noch lange nicht perfekt sind 🙁 Im Grossen und Ganzen fliegt er sich damit zwar ok, bei Vollspeed aber gibt es ein starkes Wobbeln, er schaukelt sich auf. Auch bei harten Turns gibt es starke Vibrationen. Das läuft noch nicht wirklich rund.
Nutze die PIDs mit BF 3.1.6 und relativ hohen, agilen Rates.
Hallo wir haben auch das betaflight benutzt und nun funktioniert leider nichts mehr, hat jemand ein Tipp und kann uns helfen wie wir das wieder rückgängig machen können?
Habe das gleiche Problem
Beim armen piepst er nur noch
Und aus heiterem Himmel fängt er an nur 2 Motoren zu drehen
Ohne das ich etwas mache.. lässt sich dann nur abschalten wenn er keinen lipo mehr dran hat
Bitte um Hilfe
genau das selbe Problem habe ich auch.…
leider gibt es hier wohl keinen mehr , der mitliest..sehr sehr schade