Walkera Telemetrie funktioniert nur mit Devo Sendern? Von wegen! User Bobness aus unserem Forum zeigt, wie man die Walkera Telemetriedaten in FrSky Format übersetzt. Sehr praktisch für alle, die Walkera Kopter mit dem Taranis System nutzen.
Achtung: Diese Modifikation richtet sich an erfahrene Nutzer. Fragen und Anregungen zu dem Projekt könnt ihr am besten in dem Entsprechenden Thema unseres Forums hinterlassen.
– gektor
Inhalt
Einleitung
Ich habe einen Taranis X9D Plus Sender mit einem D4R-II Empfänger gekauft um damit u.A. den X350 Pro zu fliegen. Dabei wollte ich gerne Telemetrie auf meinem Sender haben.
Erst wollte ich die Devo‑M über MavLink anzapfen. Dies ist allerdings mit sehr filigraner Löterei am Flightcontroller verbunden, da die Devo‑M keinen „Data Port” besitzt.
Daher verwende ich nun direkt das weiße Telemetriekabel, welches normalerweise in den Empfänger RX705 gesteckt wird, bzw. zum GPS-Modul führt. Somit entfällt das Löten, der Arduino muss quasi nur eingesteckt werden. Geringfügige Lötarbeiten sind am FrSky-Telemetrie-Kabel und am Kabel zum GPS-Modul notwendig.
Obacht: Nicht jedes X350 Pro hat das oben genannte weiße Kabel verbaut. Die Kabel sind in diversen Ersatzteilsets enthalten.
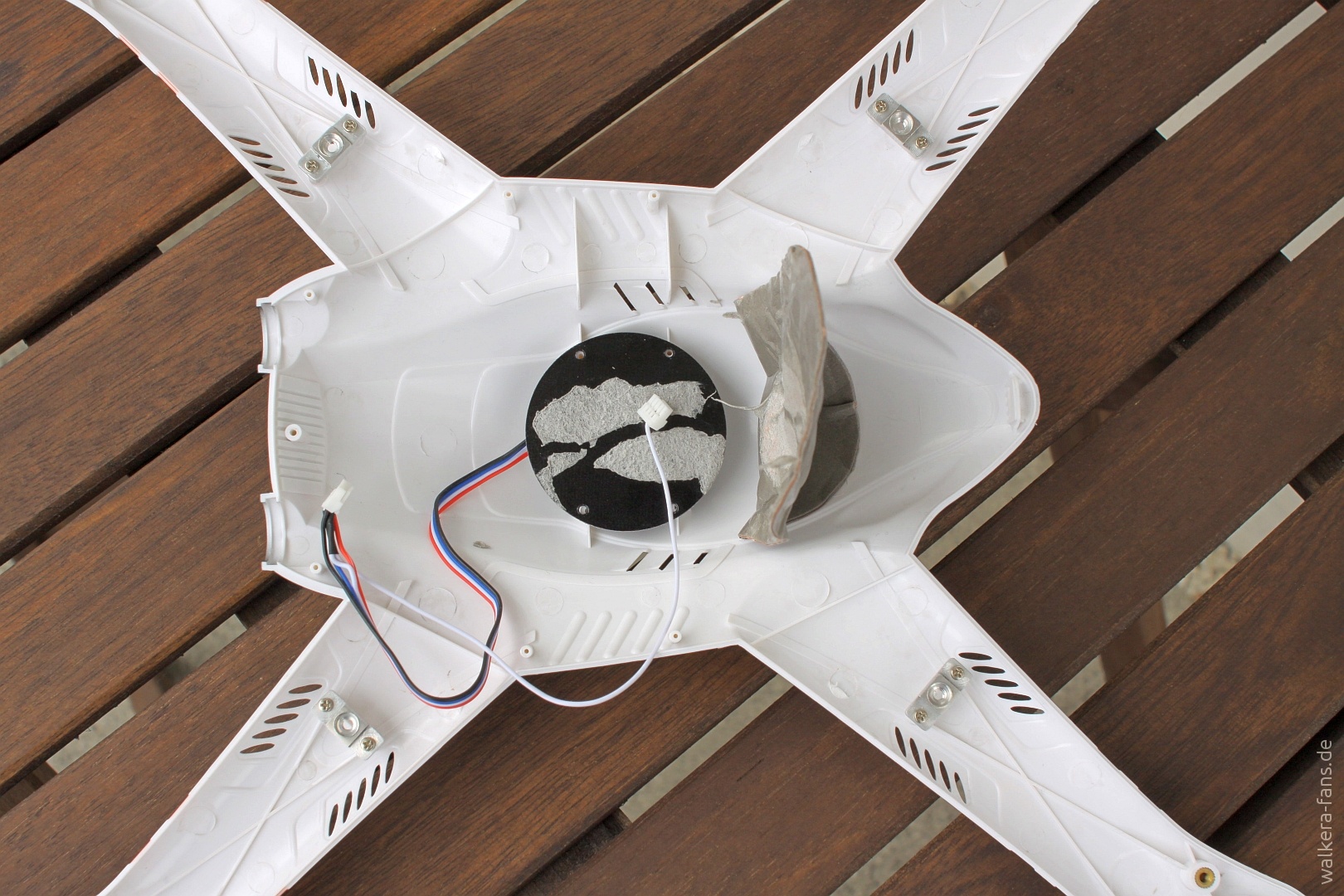
Das weiße Telemetrie Kabel
Download
30.04.2015: Version 1.0 hochgeladen, Zeitfeld ergänzt

Source und Download sind auch da zu finden: Github
Benötigte Teile
- Arduino Pro Mini (Clone) 328, 16MHz, 5V
- Ein paar Jumperkabel
- HEX-File und TTL-USB-Adapter, um es zu flashen (findet ihr im angehängten Zip-File). Hier steht wie es geht: Anleitung
Anschluss der 4 Kabel an den X350 Pro
- D4R-II/D8R-XP Empfänger:
Telemetrie Rx (Grün)
an Arduino Pin 3 - Telemetriekabel (weiß) (Tali-Set vermutlich nicht nötig)
an Arduino Pin 5 - GND und 5V (zB. von AUX3 des DEVO‑M)
an GND und VCC des Arduino (Vorsicht, nicht vertauschen!)
Am besten führt ihr die 4 Anschlusskabel für den Arduino aus dem Gehäuse raus, so könnt ihr später leichter eine neue Version mithilfe des TTL-Adapters flashen.
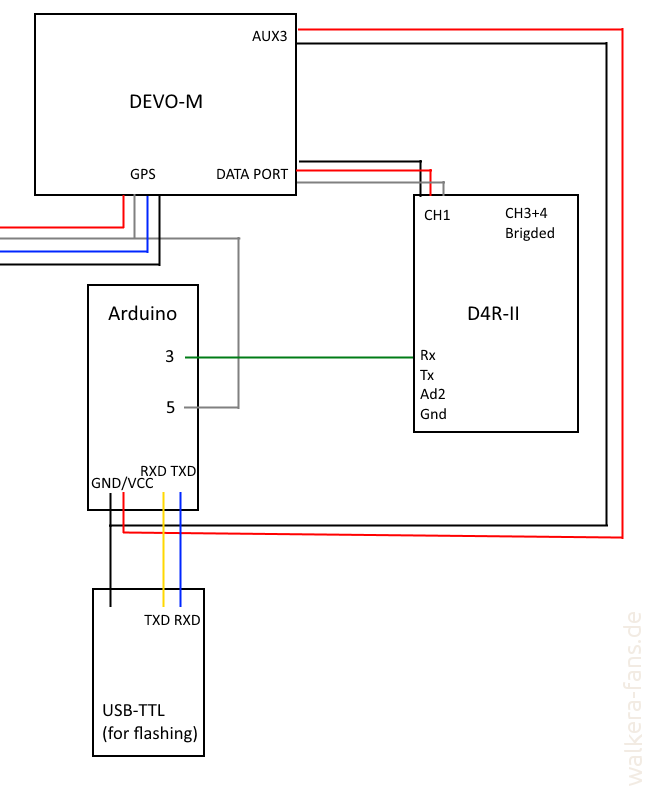
Anschlussdiagramm
Wenn der Arduino Daten empfängt, blinkt seine grüne LED.
Ergebnisse
GPS-Koordinaten im NMEA-Format, funktioniert auf den Meter genau:
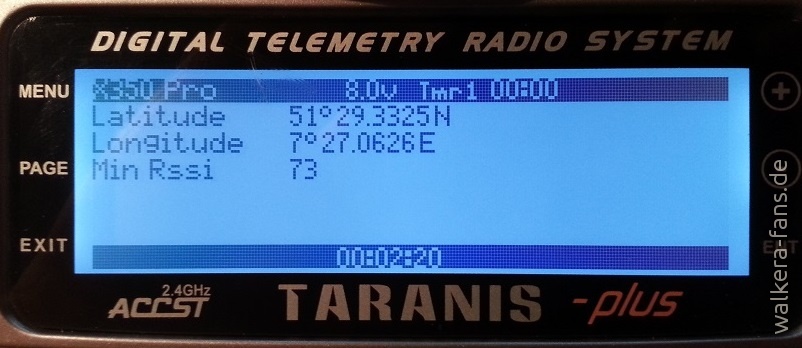
GPS-Zeit: Da die Walkera-Telemetrie leider keine Uhrzeit beinhaltet, wird stattdessen die Bootzeit des Arduinos (= Laufzeit seit Akku verbunden) in Stunden/Minuten/Sekunden unter den GPS-Koordinaten angezeigt (falls die GPS-Zeitzone geändert wurde, ist der Offset in der Zeit eingerechnet, Sommerzeit in Deutschland = +2h).
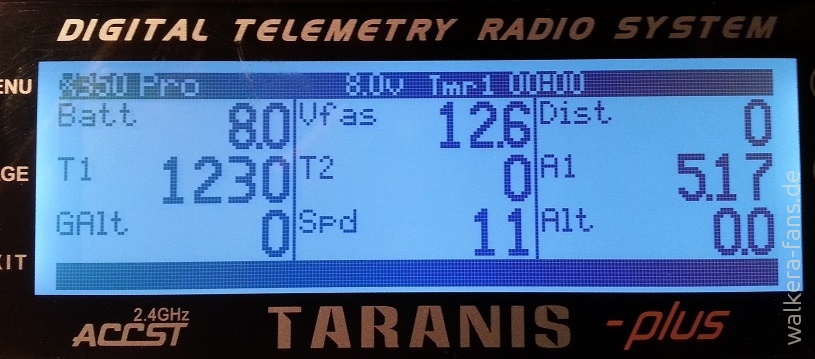
Folgende Telemetrie-Werte werden momentan ausgegeben:
- Vfas
Lipo-Spannung des X350 Pro (auf ein zehntel genau gerundet, Originalwert hat 3 Nachkommastellen) - A1
Spannung FrSky-Empfänger (immer um die 5V) - Spd
Echte Geschwindigkeit in m/s - Alt
Relative Höhe zum Start in M, genauer Wert. Vermutlich als Kombination aus GPS und Barometer vom Devo‑M berechnet. Kann auch negative Werte annehmen (Flug ins Tal z.B.) - Dist
Distanz vom Startpunkt, berechnet von der Taranis über die GPS-Koordinaten - T1
Raw-Wert aktuelle Geschwindigkeit cm/s - T2
Momentan letzter unbekannter Wert, von 0 – 255. - VSpd
Errechneter Speed aus GPS-Koordinaten - GAlt
GPS-Höhe (etwas umgerechnet von der Taranis?)
Die Telemetrie-Daten sind genauer als die Werte, die ich mit dem R705 und der Devo 10 (Deviation) bekomme. Die GPS-Koordinaten weichen bei der Devo extrem ab, dies hat auch nichts mit einer anderen Darstellung zu tun (ich habe beide Empfänger parallel an die Devo‑M angeschlossen).
Ebenfalls blitzen bei der Devo zwischendurch ungültige Volt-Werte auf, die einen Warn-Piepser wegen niedriger Spannung zufolge haben. Das macht mein Projekt schon jetzt deutlich besser.
Beste Grüße,
Bobness
Version 1.0.1 ist online.
GPS-Koordinaten werden nun im korrekten GPS-Format dd° mm.mmm’ übermittelt (vormals dd° mm’ ss.s”), wie die Taranis es gerne haben möchte.