Nach einigen Flugtagen, die ich mit Runner PID Tuning verbracht habe, bin ich mit dem Flugverhalten zum ersten mal zufrieden. In diesem Beitrag zeige ich, was ich mit meinem Runner gemacht habe um so zu fliegen wie in den Rock & Runner Videos.
![Walkera-Runner-250-S1930003.MP4_snapshot_00.10_[2015.09.13_01.55.41]](http://walkera-fans.de/wp-content/uploads/2015/09/Walkera-Runner-250-S1930003.MP4_snapshot_00.10_2015.09.13_01.55.41.jpg)
![Walkera-Runner-250-S1930003.MP4_snapshot_00.10_[2015.09.13_01.55.41]](http://walkera-fans.de/wp-content/uploads/2015/09/Walkera-Runner-250-S1930003.MP4_snapshot_00.10_2015.09.13_01.55.41-1024x576.jpg)
Walkera hat die Werte für den PID-Regler (proportional – integral – derivative controller) des Runner 250 m.E. nicht gut genug getunt. Das führte zu einem eher wenig stabilen Flugverhalten im Acro Modus. Gerade dieser Modus ist aber für einen Racer besonders interessant und nützlich.
Inhalt
PIDs einstellen
Zum Thema PIDs einstellen und Kopter mit dem PC verbinden, lest den Artikel Runner 250 basiert auf MultiWii 2.2.
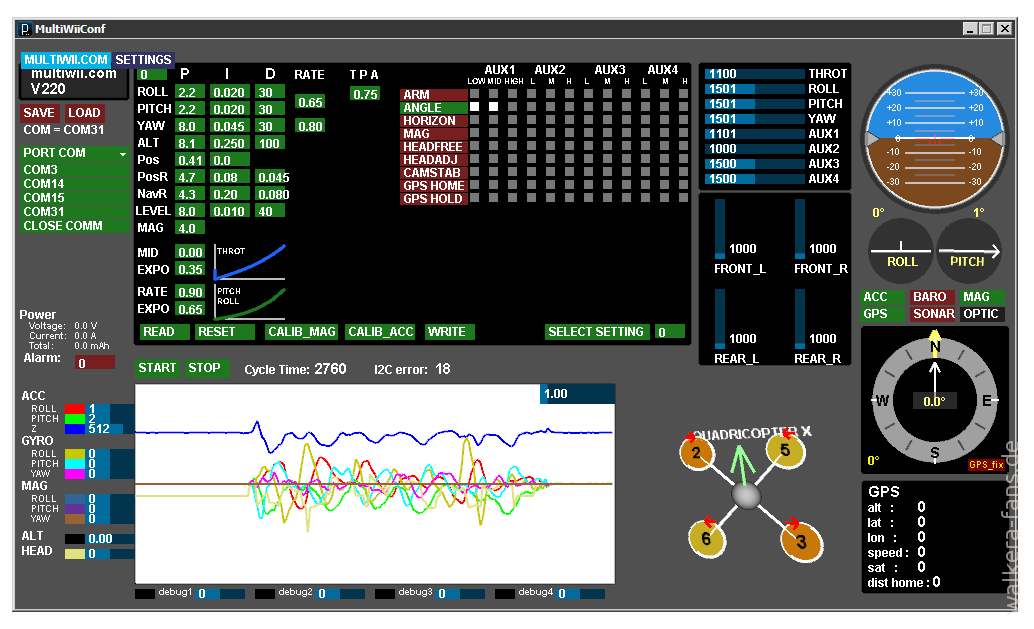
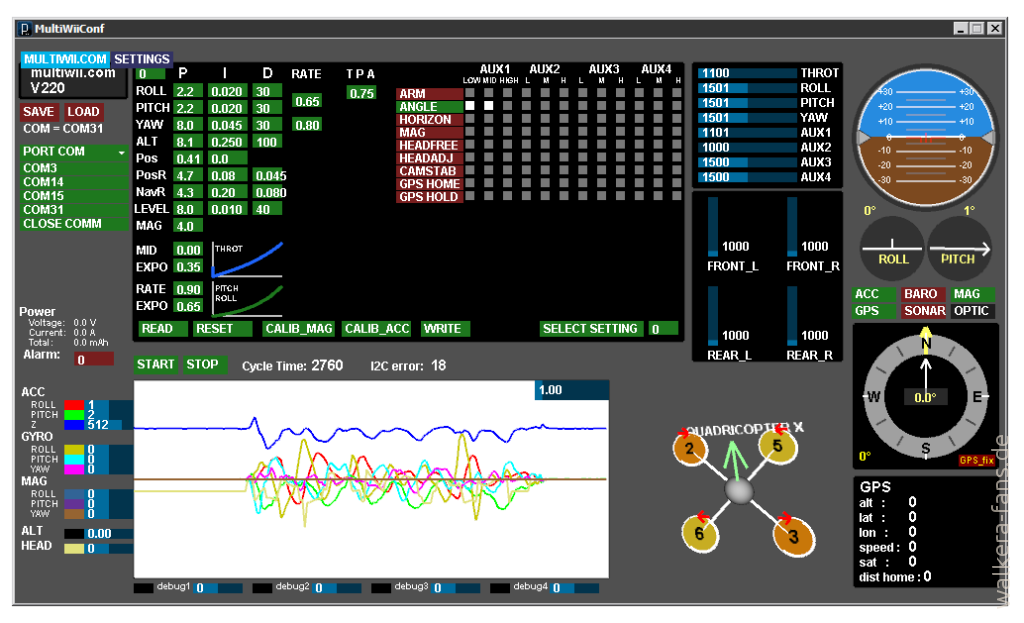
Original
Die Original Walkera Runner PIDs sehen bekanntlich so aus:

Walkera-Runner250-MultiWii-Default-Settings-2015 – 06.mwi
Gektor PIDs 1.0
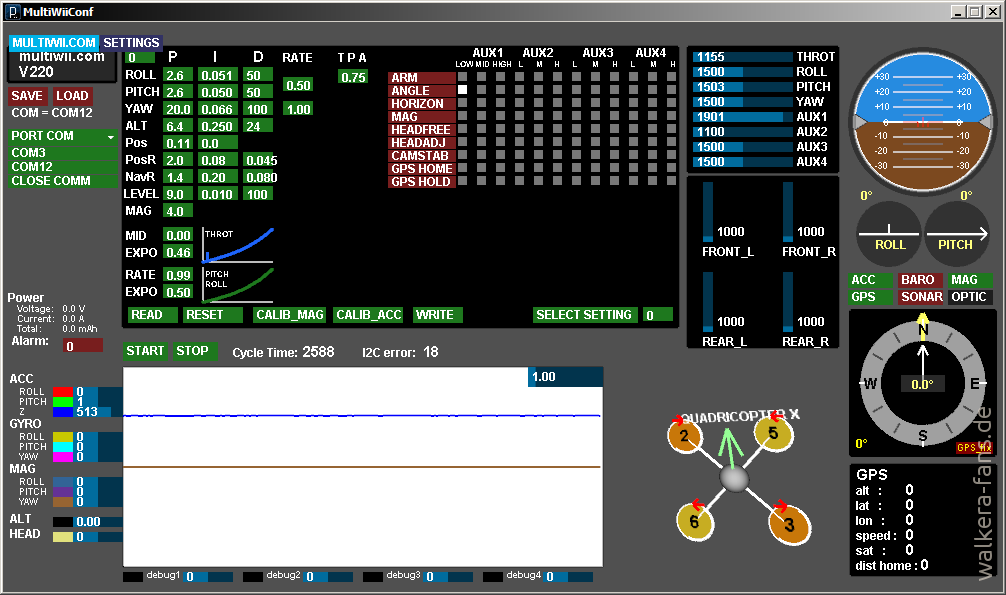
Meine PIDs sehen dagegen so aus:
Walkera-Runner250-MultiWii-Gektor‑1.0‑Settings-2015 – 09-13.mwi
Diese Einstellungen machen den Runner stabiler und kontrollierbarer, vor allem in Extremsituationen wie bei den Exits aus den Flips oder bei harten Turns.
Neben den PID Einstellungen für Roll, Pitch und Yaw, habe ich die Gaskurve (Throt unten) angepasst. Expo liegt jetzt bei 46%. Das Expo für Pitch und Roll habe ich auf 50% verringert.
Die Yaw PIDs sind ganz schön extrem geworden, aber es scheint so ganz gut zu funktionieren.
Gier-Achse ist so bei meinen Einstellungen etwas träge. Da ich die Turns aber über Nick und Roll fliege, ist das schon Ok so. Im Video fliege ich auf diese Weise.
Wer möchte, kann die PIDs für Yaw von 20⁄0,066 / 100 auf 15⁄0,066 / 50 reduzieren. Dann giert der Kopter schneller. Mittlerweile fliege ich selbst auch mit den reduzierten Werten.
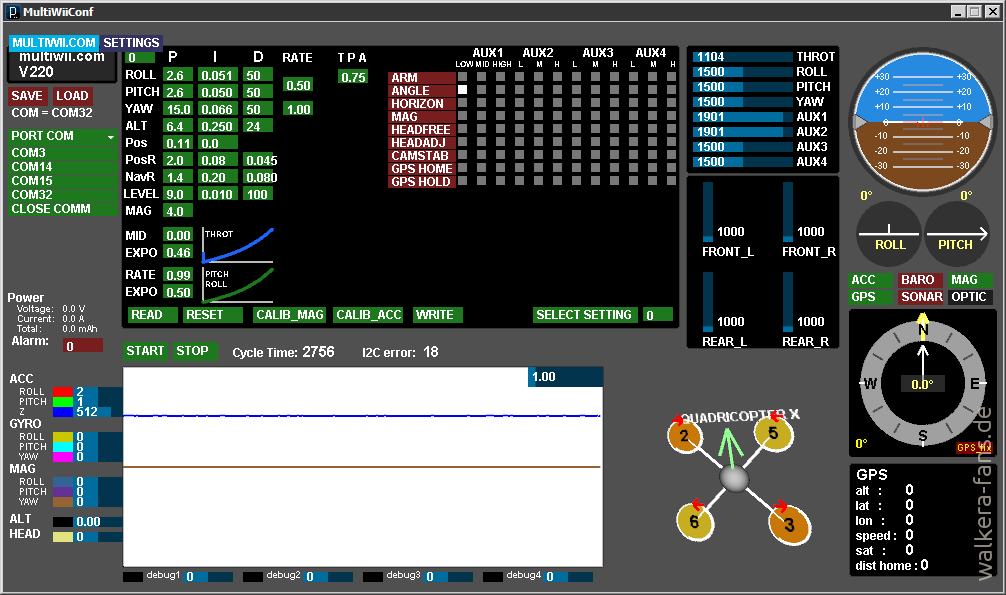
Gektor PIDs 1.1
Hier noch mal meine aktuellen Einstellungen mit den reduzierten Yaw Werten (Version 1.1 so zu sagen):
Walkera-Runner250-MultiWii-Gektor‑1.1‑Settings-2015 – 09-23.mwi
Um die Gier Rate noch weiter zu erhöhen ohne die PIDs zu verändern, kann man in dem Sender Travel Adjust für den Kanal RUDD jeweils auf 112% für Links und Rechts setzen.
Beachtet bitte, dass PID Einstellungen mehr oder weniger kopterspezifisch sind und für euren Runner eventuell nicht ganz passen. Besser als die originalen Walkera Werte sind diese PIDs allemal.
![Walkera-Runner-250-S1930009.MP4_snapshot_01.59_[2015.09.13_01.43.54]](http://walkera-fans.de/wp-content/uploads/2015/09/Walkera-Runner-250-S1930009.MP4_snapshot_01.59_2015.09.13_01.43.54.jpg)
![Walkera-Runner-250-S1930009.MP4_snapshot_01.59_[2015.09.13_01.43.54]](http://walkera-fans.de/wp-content/uploads/2015/09/Walkera-Runner-250-S1930009.MP4_snapshot_01.59_2015.09.13_01.43.54-1024x576.jpg)
Das ist mein Runner. Die PIDs habe ich mit original Walkera Propellern und dem Rahmen von Sascha gemacht.
Bonus: Firmware mit höheren Neigungswinkeln im Angle Modus und einem anderen LVC Verhalten
Hier die Firmware, mit der ich geflogen bin:
Diese hat höhere maximale Neigungswinkel im Stabilize Modus, sowie ein LVC, bei dem der Angle Modus zwar erzwungen wird, die Power aber nicht nachlässt.
Aktualisierung kann zum einen mit UP-02 Tools und dem UP-02 Dongle in Verbindung mit dem UP-02 Adapter erfolgen, siehe Walkera Update Anleitungen.
Der Anschluss für den UP-02 Adapter Kabelstrang befindet sich hinten an der Flugsteuerung. Zum Aktualisieren muss die Flugsteuerung oder der Empfänger ausgebaut werden, da der Anschluss sonst verdeckt ist.
Ebenso kann die Firmware mittels der folgenden Software aktualisiert werden:
Walkera-FlyConfig-Drones-Assistant-Installation‑1.0.zip
![Walkera-Runner-250-S1930010.MP4_snapshot_00.03_[2015.09.13_01.57.15]](http://walkera-fans.de/wp-content/uploads/2015/09/Walkera-Runner-250-S1930010.MP4_snapshot_00.03_2015.09.13_01.57.15.jpg)
![Walkera-Runner-250-S1930010.MP4_snapshot_00.03_[2015.09.13_01.57.15]](http://walkera-fans.de/wp-content/uploads/2015/09/Walkera-Runner-250-S1930010.MP4_snapshot_00.03_2015.09.13_01.57.15-576x1024.jpg)
Rock & Runner Videos mit den Runner 250 Gektor PIDs V1.0
Ich bin hier mit den oben gezeigten PIDs und mit der oben zur Verfügung stehenden Firmware geflogen.
Video-Link: https://www.youtube.com/watch?v=02rsW7BhO‑k
Video-Link: https://www.youtube.com/watch?v=5HAvo54xu2M
Video-Link: https://www.youtube.com/watch?v=5d0qMEgfK9U
Video-Link: https://www.youtube.com/watch?v=GhNPj_UaaI8
Hallo, ich habe mal ne Frage. Beim Start driftet mein Runner immer extrem nach rechts weg. Habe das gute Stück neu gekauft, ausgepackt, das Failsafe geändert – auf Motoren aus bei Signalverlust und wollte jetzt eigentlich mal einen Testflug machen.… aber leider kaum möglich weil das gute Stück gleich nach rechts abhaut. Ich muss nuch dazu sagen, dass ich bisher nur mit DJI Naza V2 geflogen bin. Da war alles etwas einfacher 🙁
Es grüßt Andreas
Steht der Kopter beim Binden der Fernsteuerung gerade? Der Runner kalibriert bei jedem Systemstart den Accelerometer und setzt das Horizont so auf den neuen Wert. Steht er schief, driftet er weg.
Zitat: Aktualisierung erfolgt mit UP-02 Tools und dem UP-02 Dongle in Verbindung mit dem UP-02 Adapter, siehe Walkera Update Anleitungen.
Ist es richtig, dass nur die DEVO 7 mit dem UP-02 Tool aktualisiert wird?
Hier werden die Modelleinstellungen gespeichert?
Der Runner hat den USB Anschluss.
Firmware-Upgrade betrifft, hier, den Kopter, nicht den Sender??
Gruß Harald und Dank für die Antwort
Um die Firmware von Runner 250 zu akzualisieren muss man den UP-02 Adapter mit dem Kabelset verwenden, weil der UP-02 Bootloader verwendet wird. Über den USB Anschluss kann man die Firmware nicht aktualisieren, nur die PID- und andere Einstellungen ändern.
Hallo Gektor,
inzwischen geht das mit der Firmwareaktualisierung über USB doch. Sieh doch mal unter folgendem Link nach:
http://www.iuasinc.com/firmware
Das Update erfolgt mit dem Walkera-Programm FlyConfig V1.0, das eigentlich für die APM basierten Copter von Walkera gedacht ist. Zum Download-Paket der obigen Seite gehört auch eine Anleitung an die man sich genau halten muss (nicht den Connect Button betätigen!), dann klappts prima. Die Echtzeit-Statusübertragung funktioniert damit aber nicht, da dazu der Copter MAVLink „sprechen” müsste, was der Runner aber leider nicht tut. Zum obigen Download-Paket gehört auch eine neue Firmware von Walkera mit Standgas (Minthrottle), woduch das Stallen des Copters beim Gaswegnehmen verhindert werden soll (Standgas funktioniert, wie sich das fliegt habe ich aber noch nicht getestet).
Zu den Protokollen des Runner auf den verschiedenen COM-Ports hätte ich noch einige Infos anzubieten, die viele der Verhaltensweisen im Unterschied zum Advance erklären. Leider scheint mir aber die Adresse eine Einbahnstraße geworden zu sein (auf meine letzten paar E‑Mails habe ich nie wieder etwas gehört). Gibt es eine bessere Adresse?
Liebe Grüße
ControllerGuru
… was ist denn mit Euch los? Ein von mir zur Info hier eingestellter Beitrag der zunächst frei geschaltet war, wurde sang- und klanglos wieder entfernt ohne einen Kommentar oder eine Begründung. Ich bin schockiert! Ich dachte immer das sei hier eine offene Plattform und kein Zensurverein.
ControllerGuru
Vielen Dank an gektor, für die schnelle und präzise Antwort.
Schon kommt meine nächste Frage:
Wo wird die Firmware aktualisiert? Im Empfänger RX 710, dort gibt es eine 4polige Buchse – wie der Stecker am UP 02 Adapter.
In der Flugsteuerung MAIN CONTROLLER – FCS; dort ist neben dem USB Anschluss eine 6polige Buchse – dafür gibt es am UP02 Adapter keinen Stecker.
An meinem BFN Selbstbau-Kit kann ich, hinten, am FCS noch eine Buchse
sehen. 4polig?
Am RTF – Kit sind RX und FCS so dicht zusammen, dass diese Buchse nicht zu sehen ist. Ein Stecker liesse nur nach Ausbau, der FCS, einführen.
LG Harald
Hallo Harald,
schau doch mal im Artikel „Runner 250 MultiWii Flugsteuerung von innen” nach, da sind Bilder. Die vierpolige Programmierbuchse, passend für den Programmer-Stecker, befindet sich auf der dem Receiver zugewandten Seite des Flugcontrollers. Um da dran zu kommen musst Du den Controller vorsichtig von der Verklebung lösen. Das ist aber kein Problem, da der Kleber recht gut klebt und nach dem Programmieren einfach wieder angedrückt werden kann.
Beim neuen Runner soll das dann noch komfortabler sein, da man laut Anleitung den „Neuen” über die USB-Buchse programmieren könen soll (ohne Programmieradapter). Das wird dann vielleicht auch mit dem alten Runner funktionieren, da über beide Stecker auf den USART 0 des Mikrocontrollers zugegriffen wird, der für die Programmübertragung zuständig ist. Derzeit kann man aber über die PC-Software zum UP-02 noch nicht die USB-Schnittstelle für die Programmierung auswählen. Ich erwarte in kürze von Walkera daher eine neue GUI-Version für den UP-02. Das kann sicher nicht mehr lange dauern, da die ersten Runner Advance bereits ausgeliefert werden.
LG
ControllerGuru
Hallo ControllerGuru,
vielen Dank für deine schnelle und präzise Information.
Ich bin kein schlechter Bastler als Modellflieger, aber in der Informationstechnik ( Computer ) bin ich absoluter Dummuser.
Mit guter Anleitung und logischem Denken schaffe ich Vieles.
LG
Harald
Hi Gektor der Linkoben Runner 250 basiert auf MultiWii 2.2. funktioniert leider nicht… sg
Danke Totti, habe ich direkt korrigiert! 🙂
Ich hab mal ein bisschen was zu den PID’s gefunden. Ich denke das könnte jeden interessieren der einen Kopter zum Fliegen ermutigen möchte… Und wenn man sich sauber an die Anleitung hält hat man einen Kopter der das macht was er soll… nämlich absolut toll fliegen.
Hier der Link dazu…
http://www.google.de/url?sa=t&source=web&cd=1&ved=0CB4QFjAAahUKEwj27v_r4rfIAhWKXRoKHVTnB7s&url=http%3A%2F%2Fdl.btc.pl%2Fkamami_wa%2Fhk_26588_20.pdf&usg=AFQjCNF6f9DGs30jpsbQtfSScSQaaoQ8mw
Und nun viel Spaß beim Einstellen und erfliegen der PID’s . ?
About Gektor firmware: is it possible updating using walkera update Tool available @ iuasinc? Do you know which is flight control board type so I can connect and update with Arduino?
Guten Morgen, sagt mal macht es Sinn das Update der Firmware und die Einstellungen in MultiWii vor dem ersten Start als Anfänger zu machen ?
Gruß André
Hallo Andre,
bin auch Anfänger. Mache es doch so wie ich und fliege im Angel Modus um ein Gefühl für das Flugverhalten zu bekommen, dann ACRO.
Danach mal mit den unterschiedlichen PID – Einstellungen, s.o. testen. So bemerkst Du sofort die Unterschiede zu den Originaleinstellungen.
Generell lässt sich aber Deine Frage m.E. nicht beantworten. Ich habe zunächst Gektors PID V1.0 getestet und war erstaunt. wie träge gegenüber zuvor der Runner reagiert. Habe jetzt / heute Gektors PID V1.1 übernommen, kann aber wegen des schlechten Wetters nur im (90qm) Wohnzimmer damit rumdüsen.
Schönen Abend
Wolfgang
Hallo,
ich habe da mal eine Frage. Ich habe bei meiner Devo 7 Steuerung um ehrlich zu sein etwas zuviel rumgespielt und einen Reset ausgeführt. Seitdem geht bei mir der Roll Modus bzw flips nicht mehr. Wie kann ich das wieder einstellen das dies wieder geht?
Vielen dank
Gruß
Sascha
Ist da nicht ein Widerspruch im Text?
__
Die Yaw PIDs sind ganz schön extrem geworden, aber es scheint so ganz gut zu funktionieren.
Wer möchte, kann die PIDs für Yaw von 20⁄0,066 / 100 auf 15⁄0,066 / 50 reduzieren. Dann giert der Kopter schneller. <– Wenn man reduziert, giert er schneller. Und es wurde doch gesagt, sie könnten für manche zu extrem sein?
__