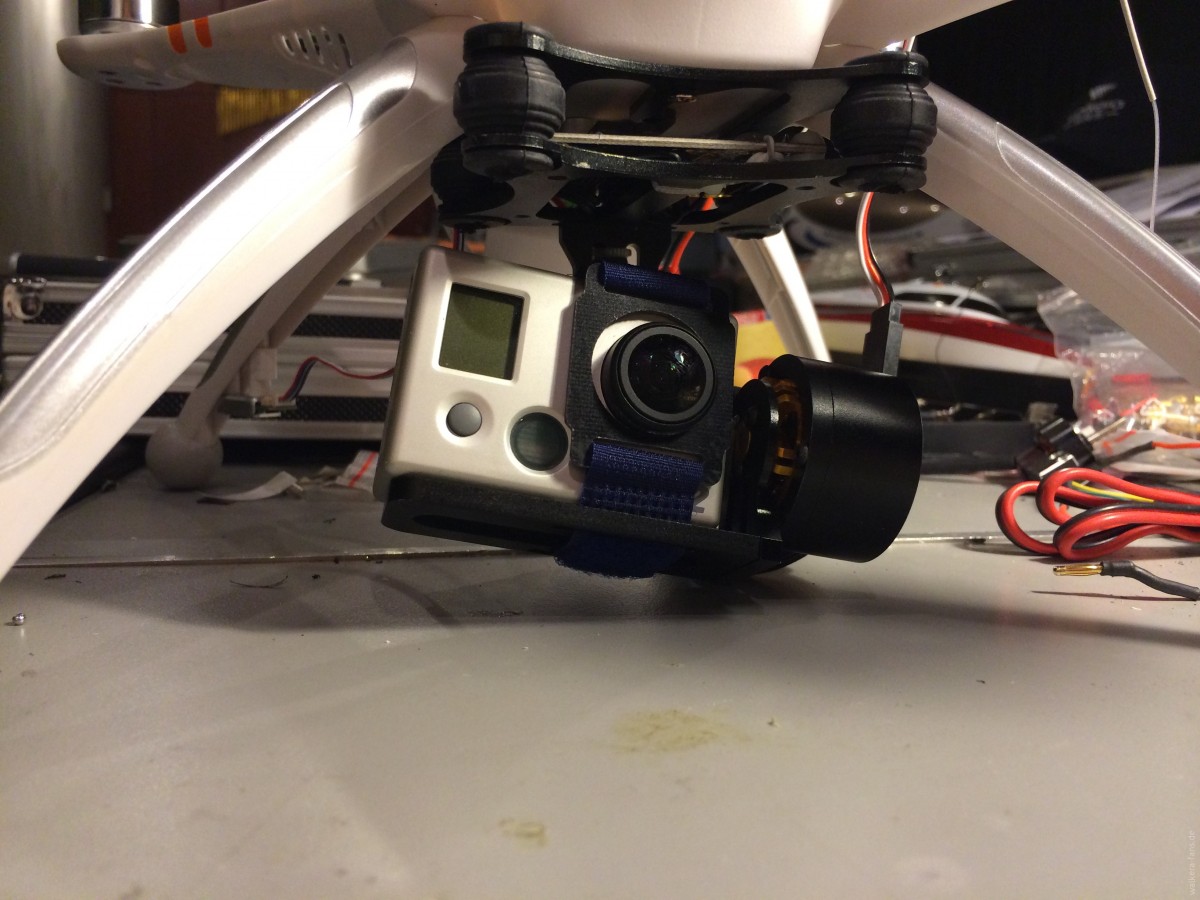
Viele beschäftigen sich auch damit, ein Brushless Gimbal am QR X350 zu montieren. Wir machten den Versuch mit einem China-Gimbal und einer GoPro Hero2.
Der QR X350 ist damit schon ordentlich beslastet, da das Gimbal gute 200g auf die Waage bringt und die Hero2 noch mal ca. 100g.


Diesen QR X350 hier habe ich für einen Freund aufgebaut. Um das Gimbal über den Poti an der Devo 7 schwenken zu können, musste wieder der Deckel runter.


Es wurde eine weitere Bohrung zur Befestigung des Gimbalhalters nötig und darüber musste noch ein Mutter eingeklebt werden, damit es angeschraubt werden kann.
Nachdem das Servokabel für Nick am Empfänger eingesteckt und der Kleber hart war, durfte der Deckel wieder drauf und alle 21 Schrauben wieder rein.
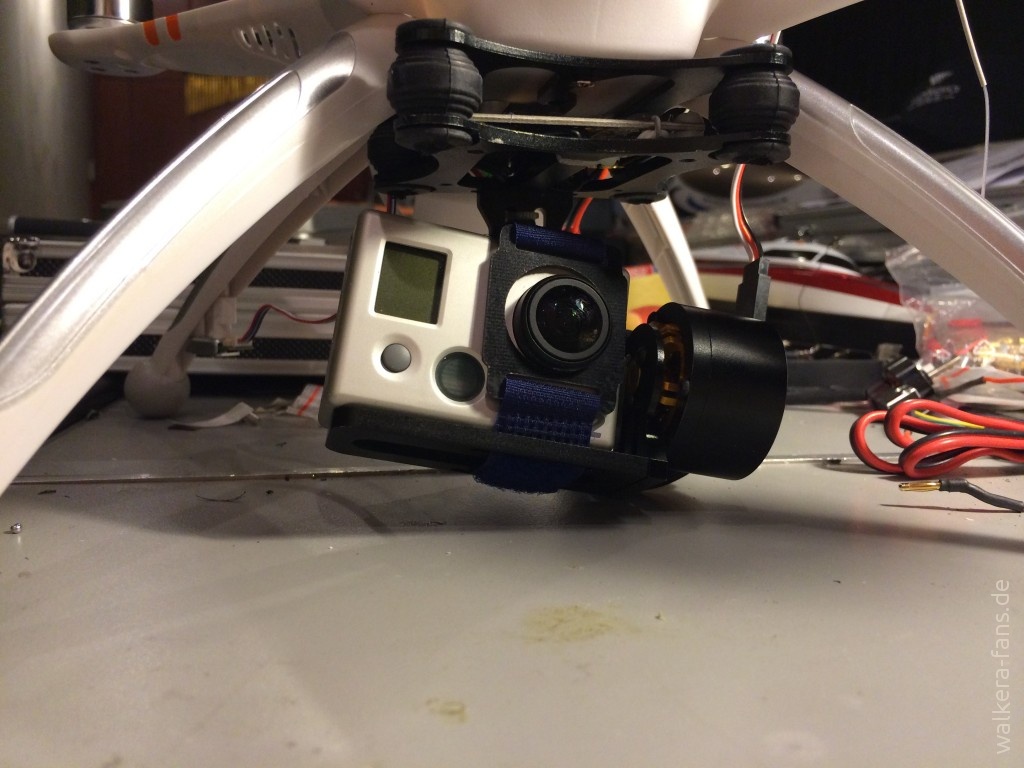
Viel Platz ist da nicht mehr, man sollte schon vorsichtig und auf ebenen Flächen Landen um nicht mit dem Gimbal aufzusetzen.
Das Gimbal wird einfach an den Versorgungsstecker des QR X350 gesteckt und dann aus dem 3S-Akku mit Strom versorgt. Vor dem Start sollte das Gimbal genauso wie der Copter (Firmware 1.3) absolut waagerecht stehen und so kalibriert werden.
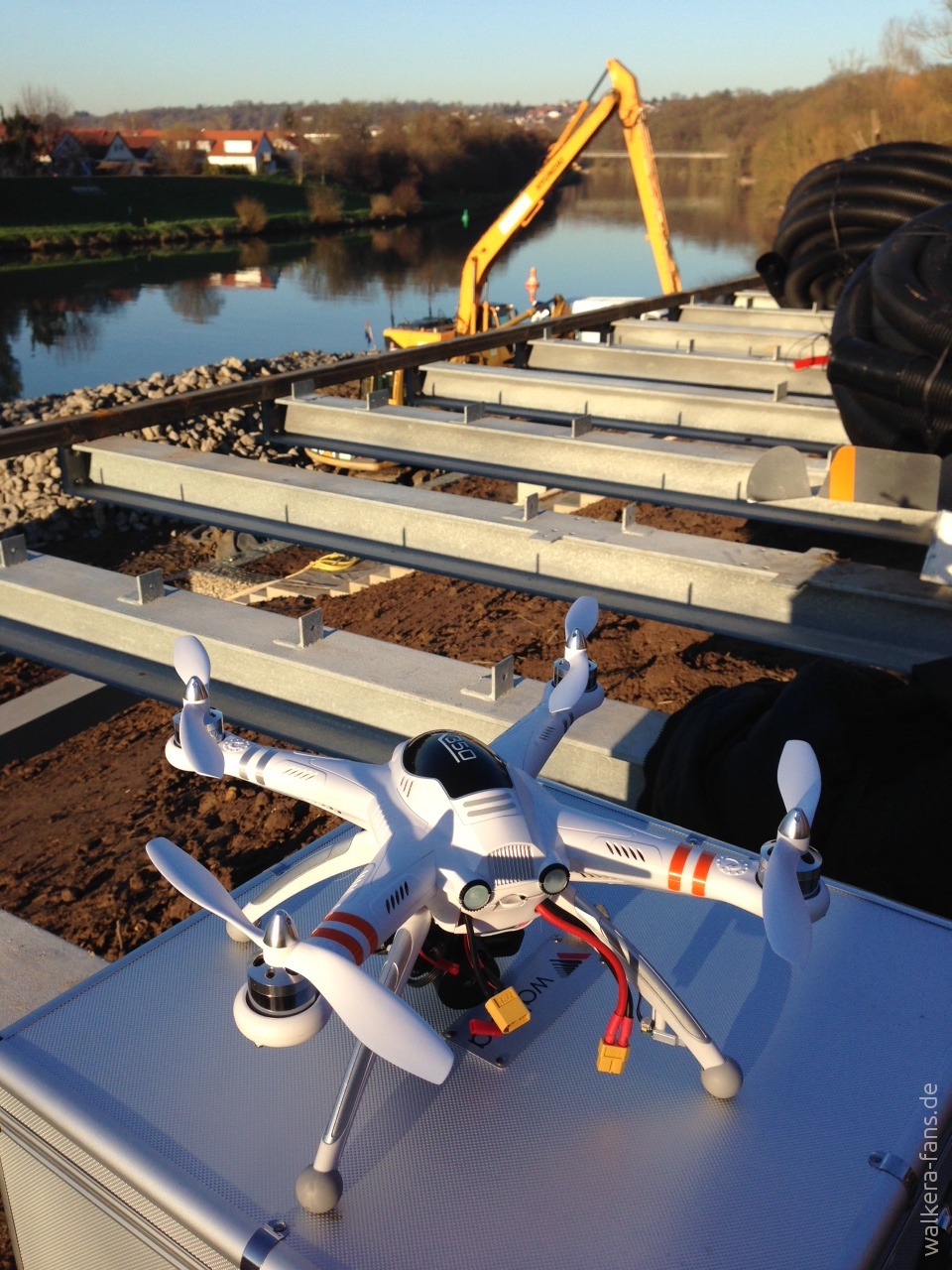

Der Koffer leistet hier gute Dienste. Übrigens passt der QR X350 komplett aufgebaut (Props auch noch dran) in den Koffer des QR X400, MX400 oder HotenX. Leider ist der Koffer, der von Walkera für den QR X350 angeboten wird, sehr flach und es müssen zum Transport das Landegestell und das Gimbal abgebaut werden.
So bewaffnet ist der QR X350 natürlich kein Agilitätswunder mehr, aber er lässt sich sehr präzise und kontrolliert fliegen. Beim Abstieg aus großen Höhen darf man nicht ganz so stark das Gas rausnehmen wie ohne diesen Ballast, sonst kann es passieren dass man unfreiwillig sehr hart aufsetzt! 🙂
Claus-Peter der diesen QR X350 fliegt benutzt Zippy Compact Akkus mit 2450mAh und 35C. Er erreicht damit Flugzeiten von knapp über 6min mit der Firmware 1.3_2. Man sollte sich also den Timer auf 5min. stellen um noch sicher nach Hause fliegen zu können.
An dieser Stelle möchte ich mich auch noch einmal bei Claus für die schönen Outdoor-Bilder von seinem Copter bedanken. 🙂


Hallo
schöner Bericht. Eine Frage sind die Chinas-Gimbal ihr Geld wert?
Es gibt ja schon ab ca. 60 Euros im Ebay.
Gruß, André
Hallo Andre,
mechanisch sind diese Gimbals genauso gut wie andere auch.
Hier kommt es eindeutig auf die Programmierung und das Board an.
Wir haben eines mit einem Martinez-Clone erwischt und die Programmierung funktionierte auch einigermaßen mit der Hero2 (eigentlich war es für eine Hero3 programmiert). Man kann da aber auch Pech haben und die Programmierung ist voll daneben, dann muss man herausfinden welche Firmware verwendet wird und welche Einstelltools dafür nötig sind.
Hat man dieses KnowHow kann man diese Gimbals auch optimal einstellen und sie funktionieren einwandfrei.
Meiner Meinung nach ist so ein Gimbal auf jeden Fall sein Geld wert.
Die Motoren kosten 20€ das Stück, das Board 10€ und für weitere 10€ bekommst du die Aluteile, was will man mehr?
Auf RCLine gibt es einen gute Diskusion zu solchen Gimbals, ungefähr ab hier: http://www.rclineforum.de/forum/board188-multikopter/fertigmodelle-und-baus-tze/walkera-qr-x350-gps-der-n-chst/Beitrag_4325710#post4325710
Peter (alias Xdingo) hat dazu sehr aufwendige Test durchgeführt und auf seine Angaben kann man sich 100% verlassen.
Schöner Bericht !
Ich hätte da mal eine Frage ?
Ich habe auch ein China-Gimbal montiert das auch funktioniert .
Ich habe mich aber nicht getraut es an den Empfänger an zu schließen .
Es ist bei org. kein Stecker mehr frei ! Was habt Ihr abgezogen um
das Gimbal an zu steuern ?
Für etwas Hilfe und ein paar Tipps wäre ich dankbar .…..
AUX2 ist bei RX702 doch frei, oder nicht? Bei uns ist dieser Kanal noch frei. Darüber wird das Gimbal gesteuert.
Hallo
mein China-Gimbal ist eingetroffen . Es hat 69.92 .- Euros gekostet .
Ist RTF und funktioniert auch soweit , aber noch nicht am QR X350
getestet . Laut Beschreibung ein BGC 3.1 Controller . Da ich die Go Pro
45 Grad nach unten schwenken möchte suche ich die passende Software
dazu . Mir ist nicht ganz klare obe es ein Alex Mos oder Martinez Clone ist .
Beide Software bekommt keine Verbindung zum Gimbal .
Weis jemand Bescheid .
Gruss André
Hat dein Gimbal kein Servoanschluss? Dann kannst du es an AUX2 deines Empfängers anschließen und den Gimbal neigen.
Ich habe heute meinen X350 PRO bekommen mit Gimbal und auch alles angebaut, dazu habe ich eine DEVO 10. jetzt habe ich folgendes Problem, die Roll Achse lässt sich wie beschrieben über AUX 5 Steuern nur leider nicht die Pitch Achse. Die lässt sich, nur solange die Motoren noch blockiert sind, über den Gashebel (linke Seite) steuern. Sobald die Motoren freigeschaltet sind lässt sich die Pitch Achse gar nicht mehr steuern. Woran könnte das liegen? Wie kann ich das Problem beheben, sodass ich wie beschrieben die Pitch Achse über AUX 4 steuern kann? Vielen Dank für jede Antwort!! Mit freundlichen Grüßen Marco
Bei mir funktioniert dieses AUX2-Neigen nicht. Ich muss doch eigentlich nur AUX2 am Gimble mit AUX2 am RX verbinden, den Output am Sender von AUX2 auf AUX2 stellen, oder ? Rührt sich leider nix …
Works – thx !
Hi, würde gern mal den elektrischen Anschluss wissen, habe den selben Gimbal, leider ohne Kabel!
Will ihn auch an auf 2 anschließen, am Gimbal selbst sind 9 Pins