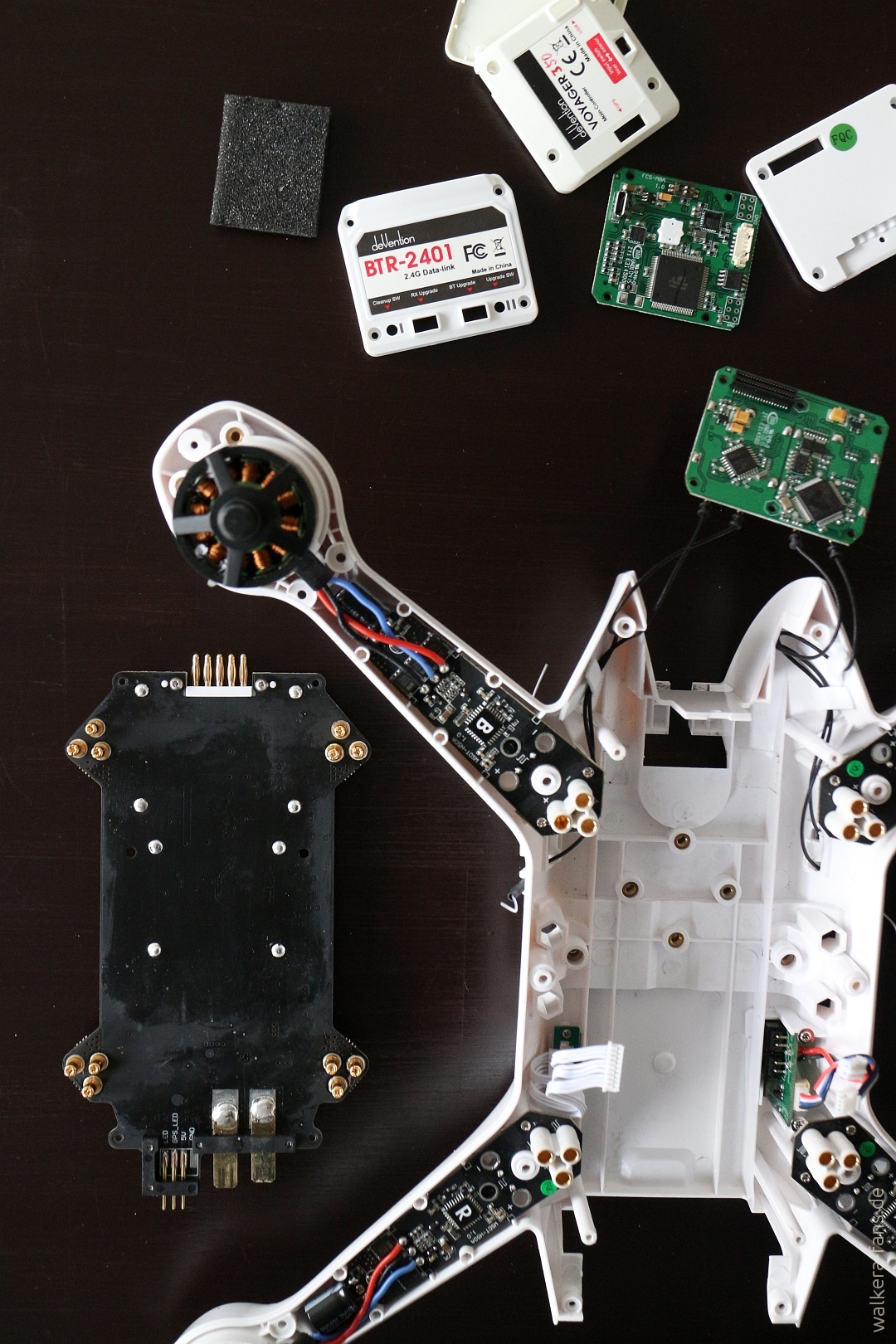
Fast keine Kabel, sehr kompakte und hochwertige Module. Einen so aufgeräumten und durchdachten RTF Kopter habe ich bislang noch nie gesehen – der Premium zeigt auch im Inneren große Klasse!
Inhalt
Überblick
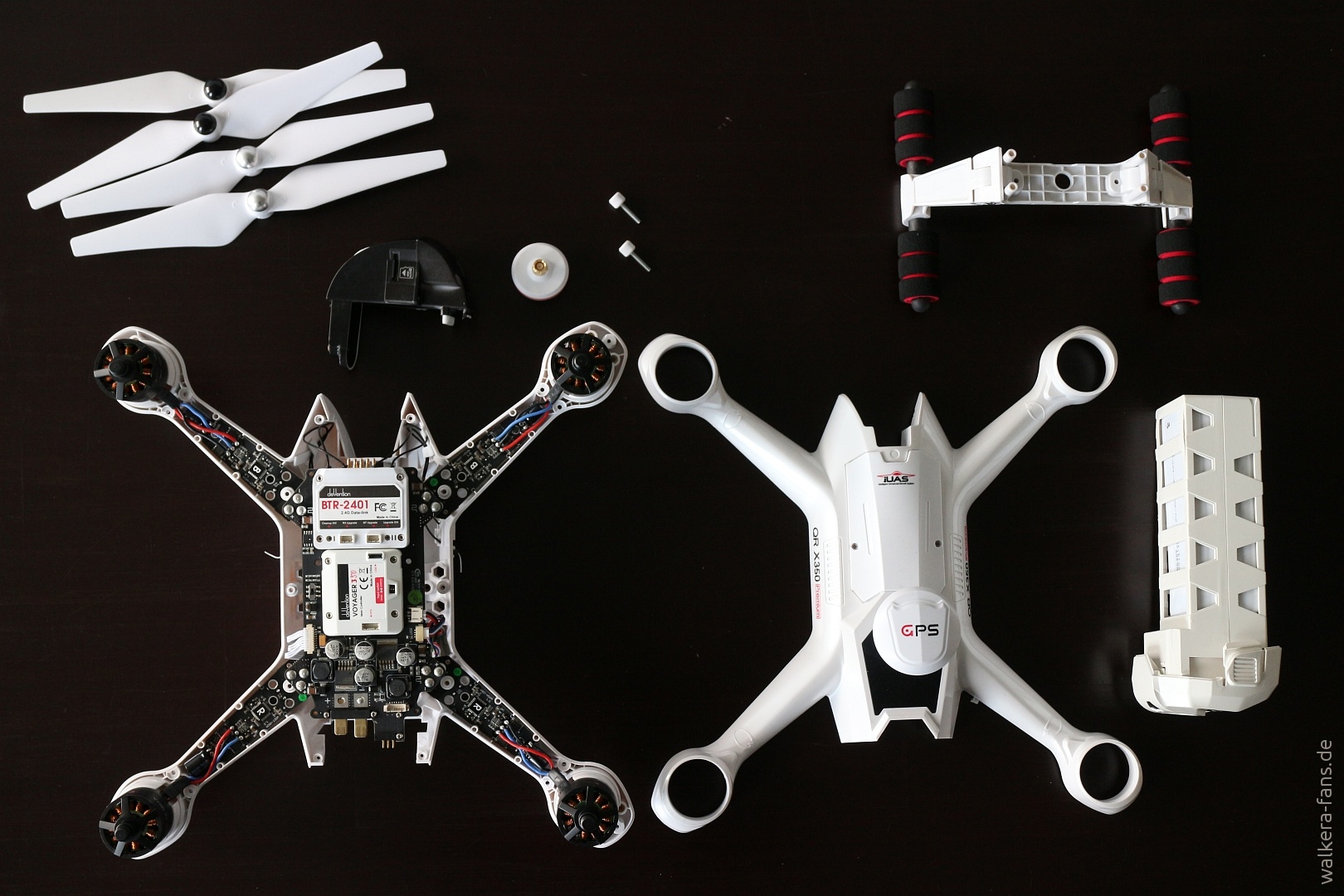
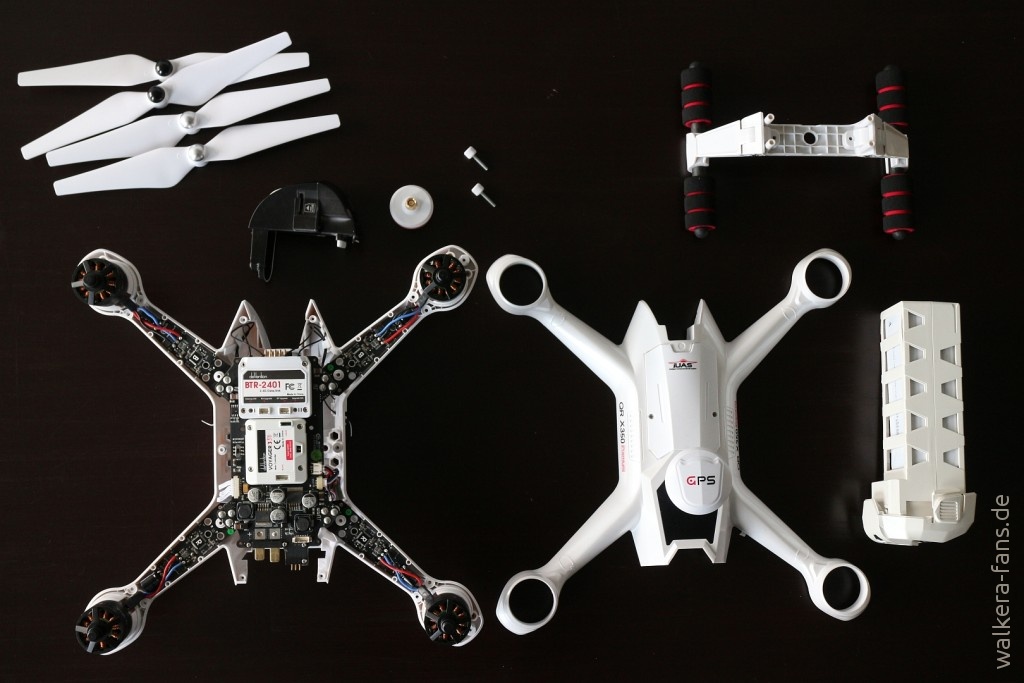
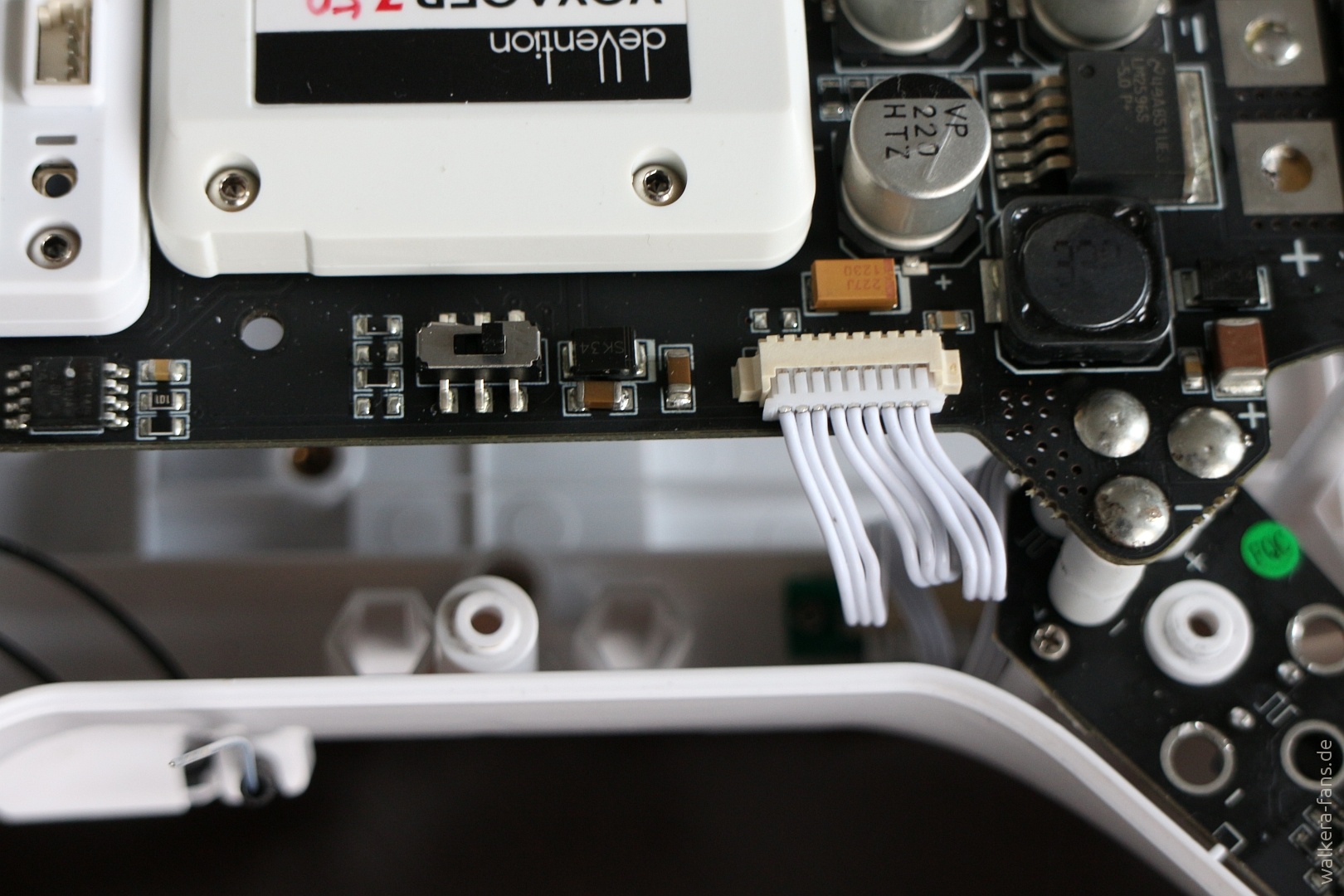
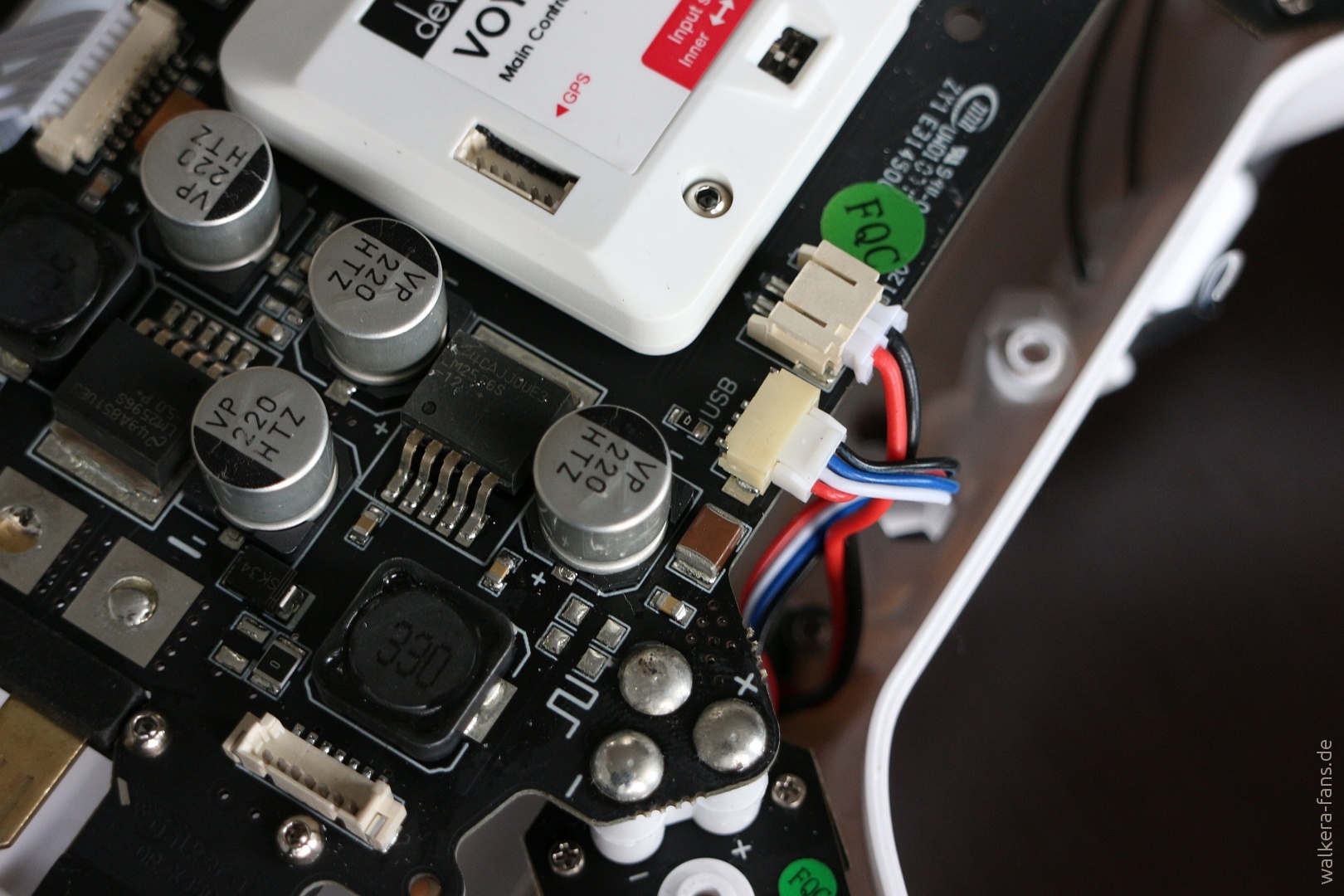
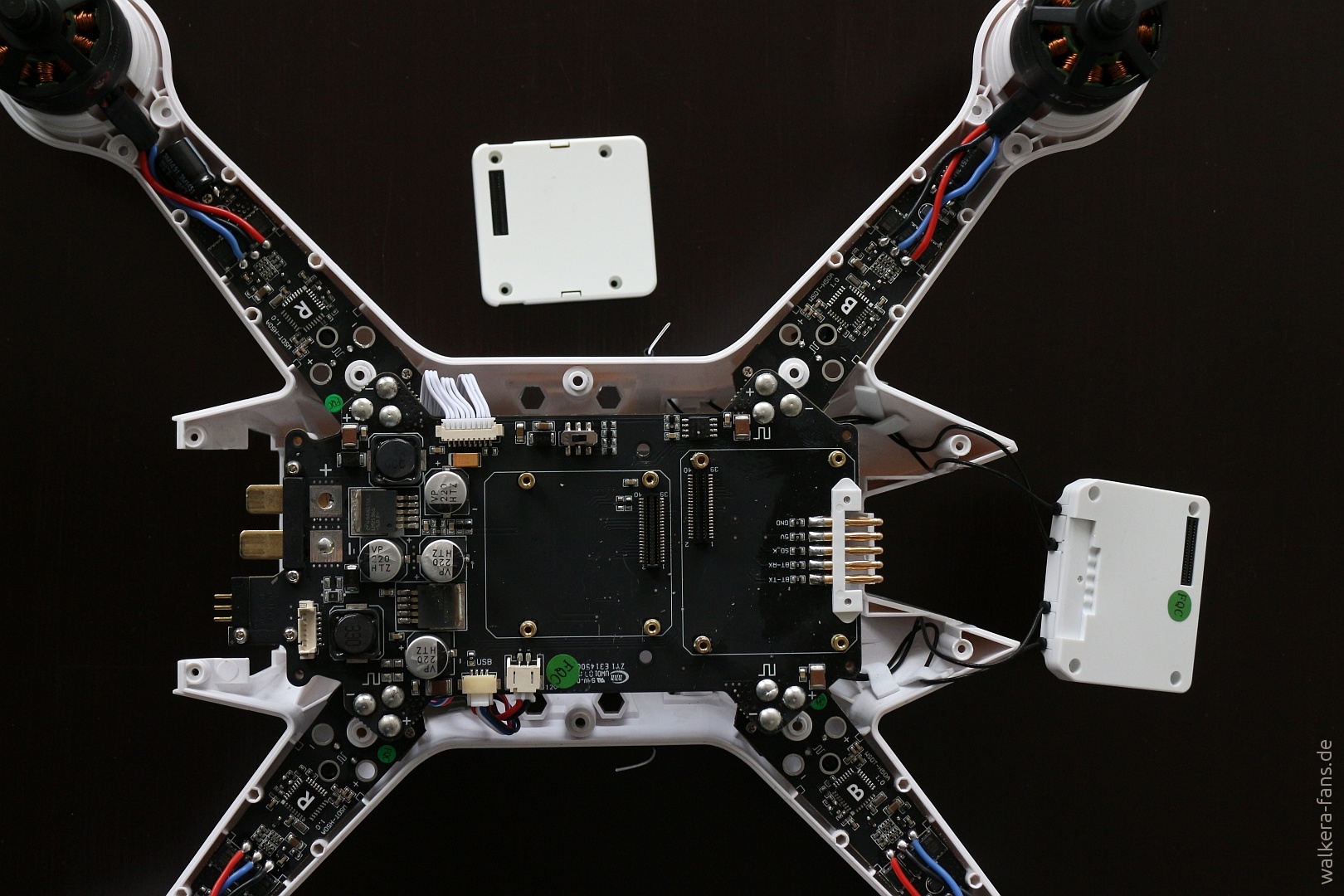
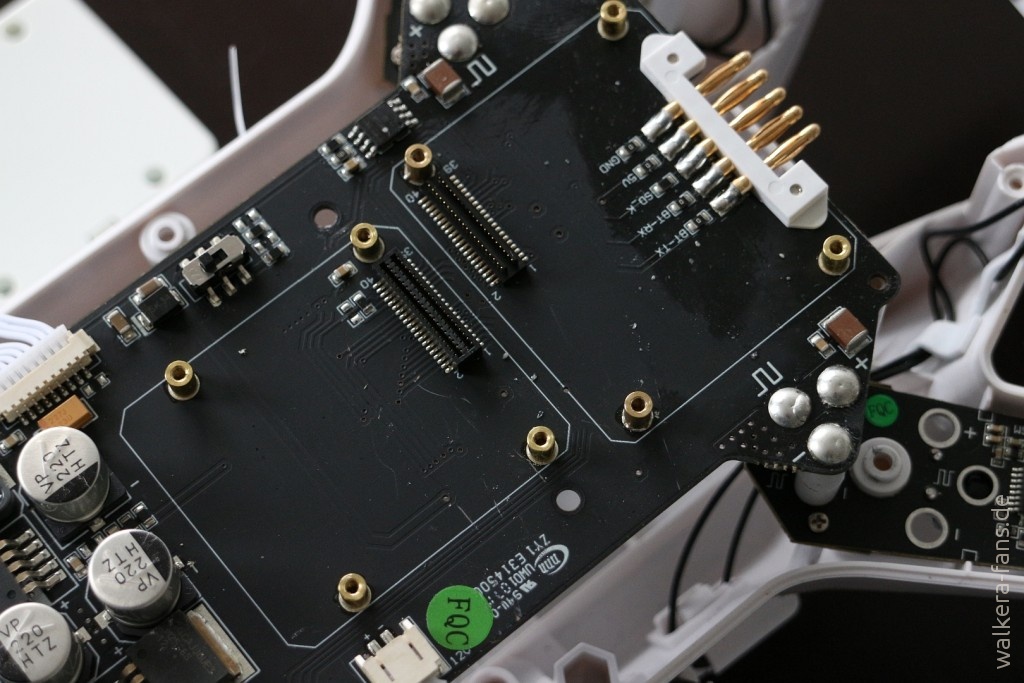
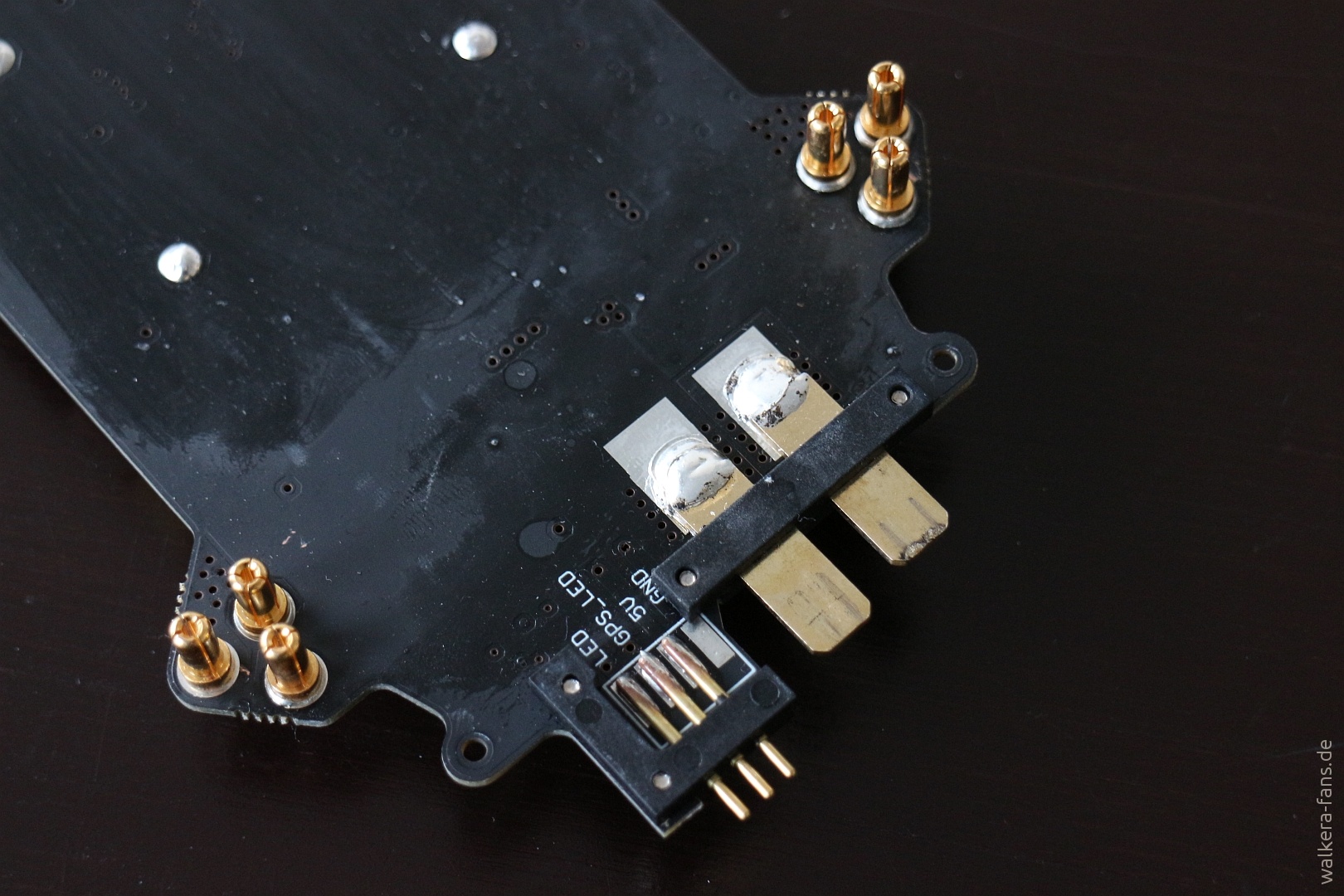
Es sind fast keine Kabel zu sehen:
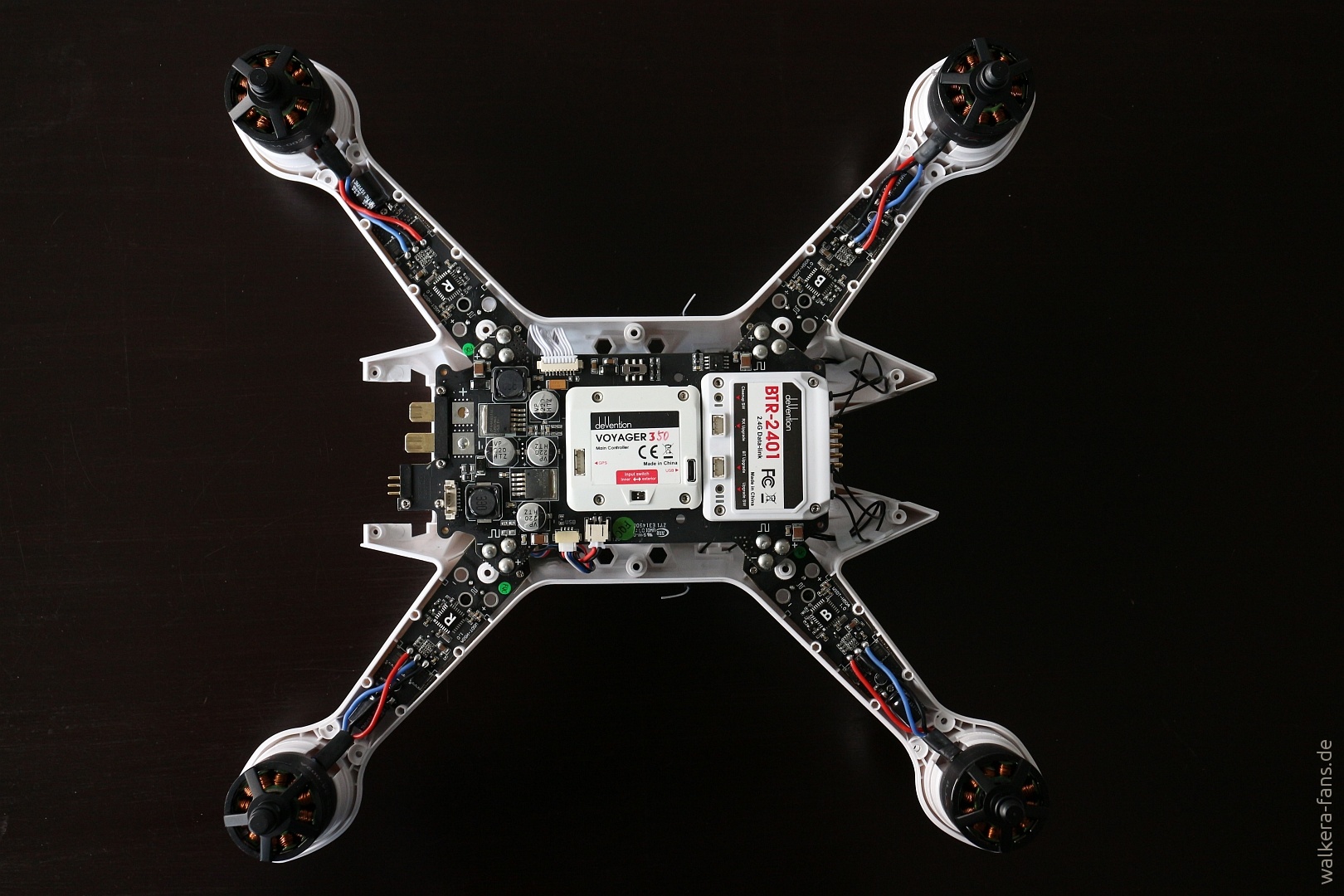
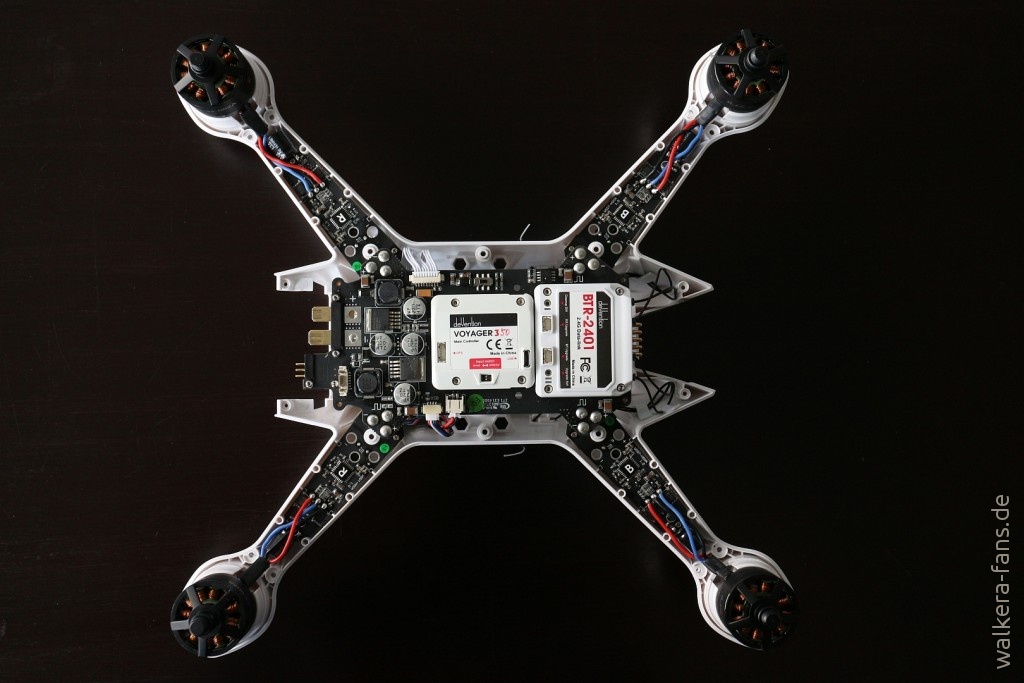
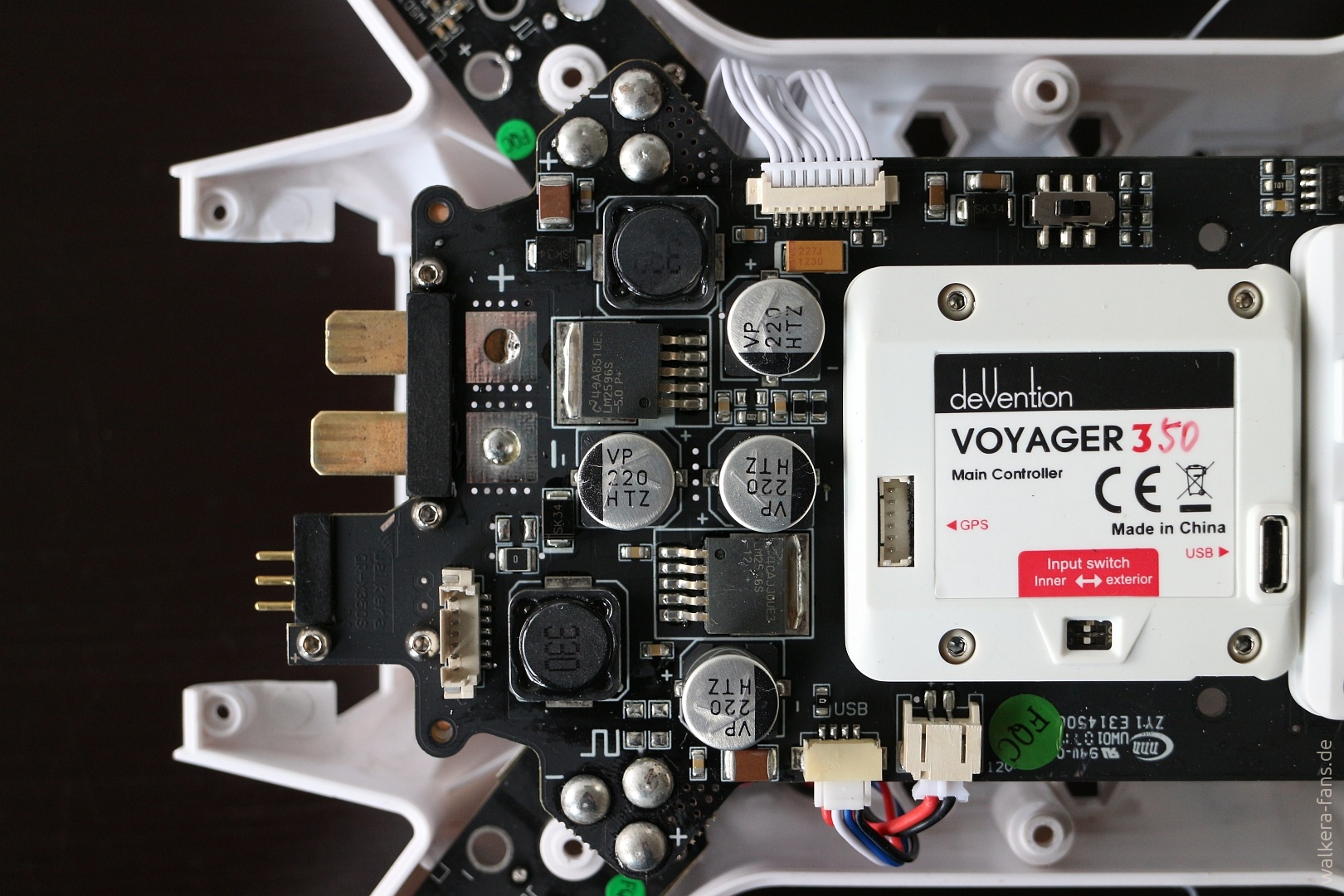

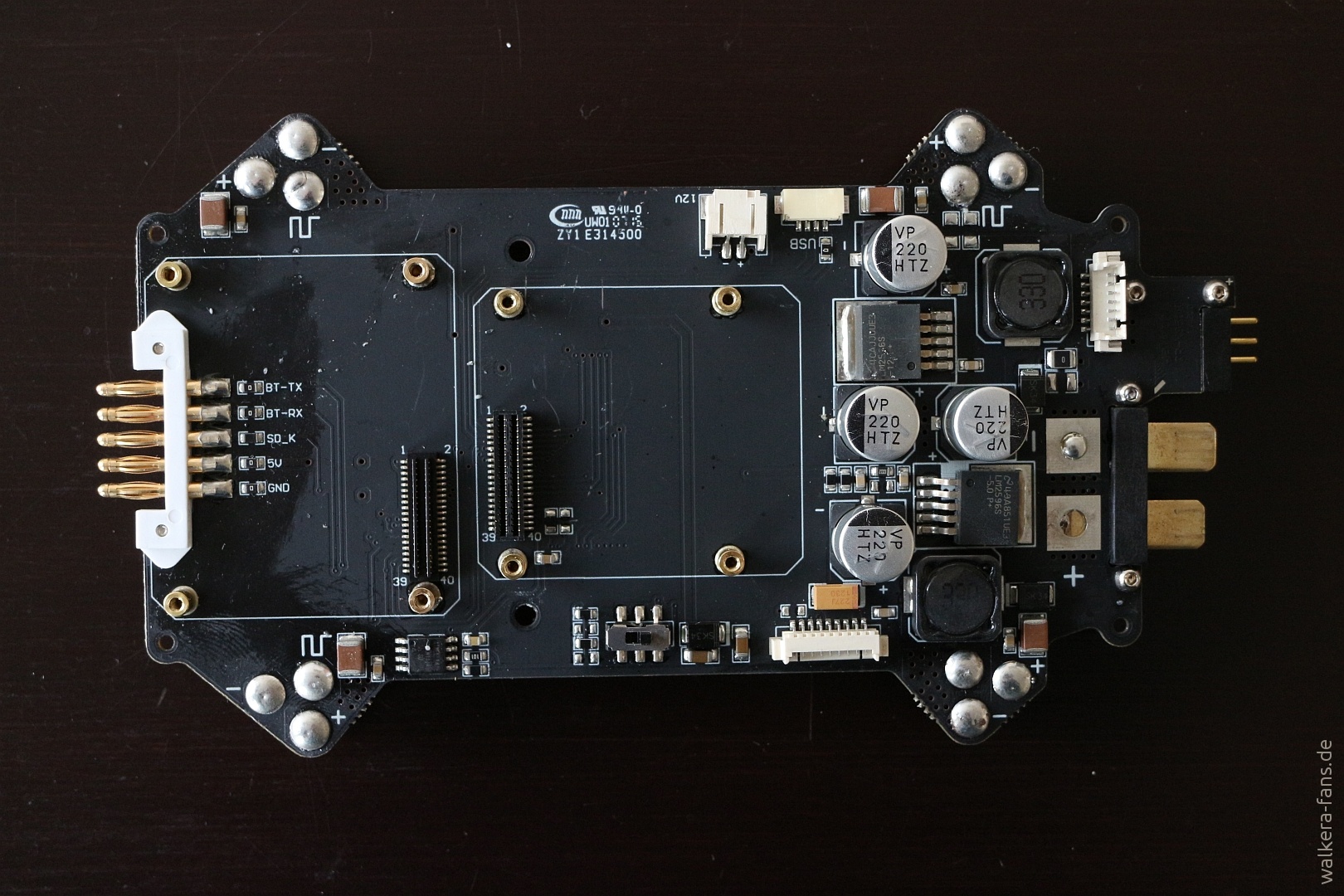
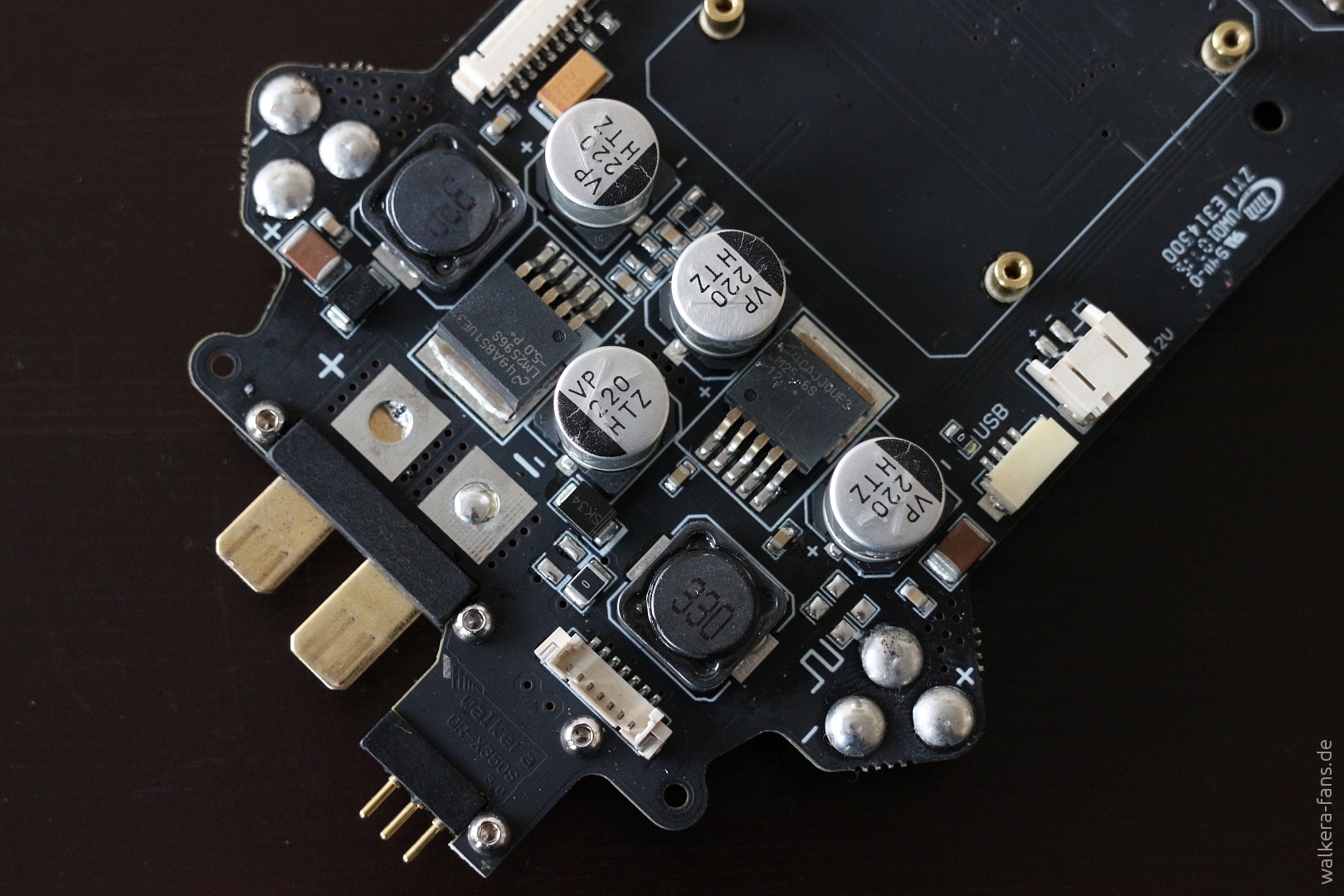
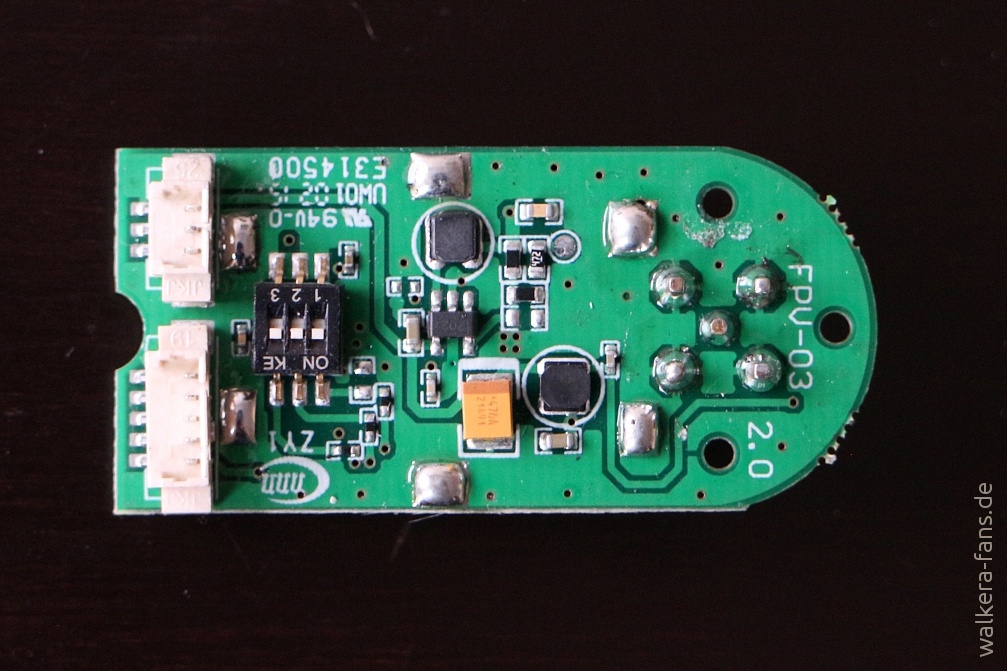
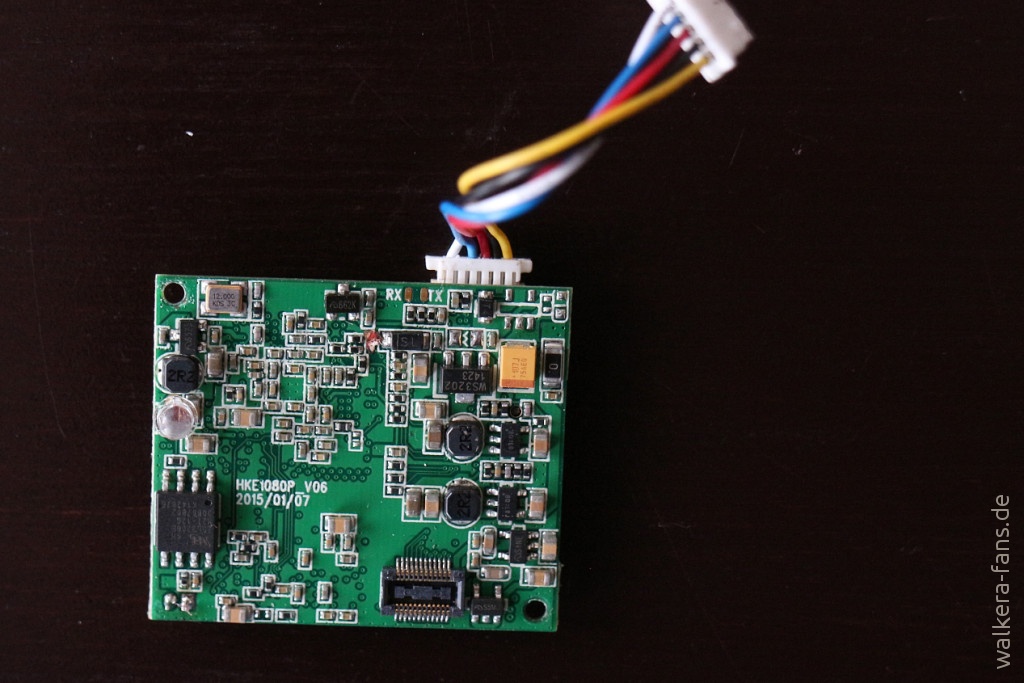
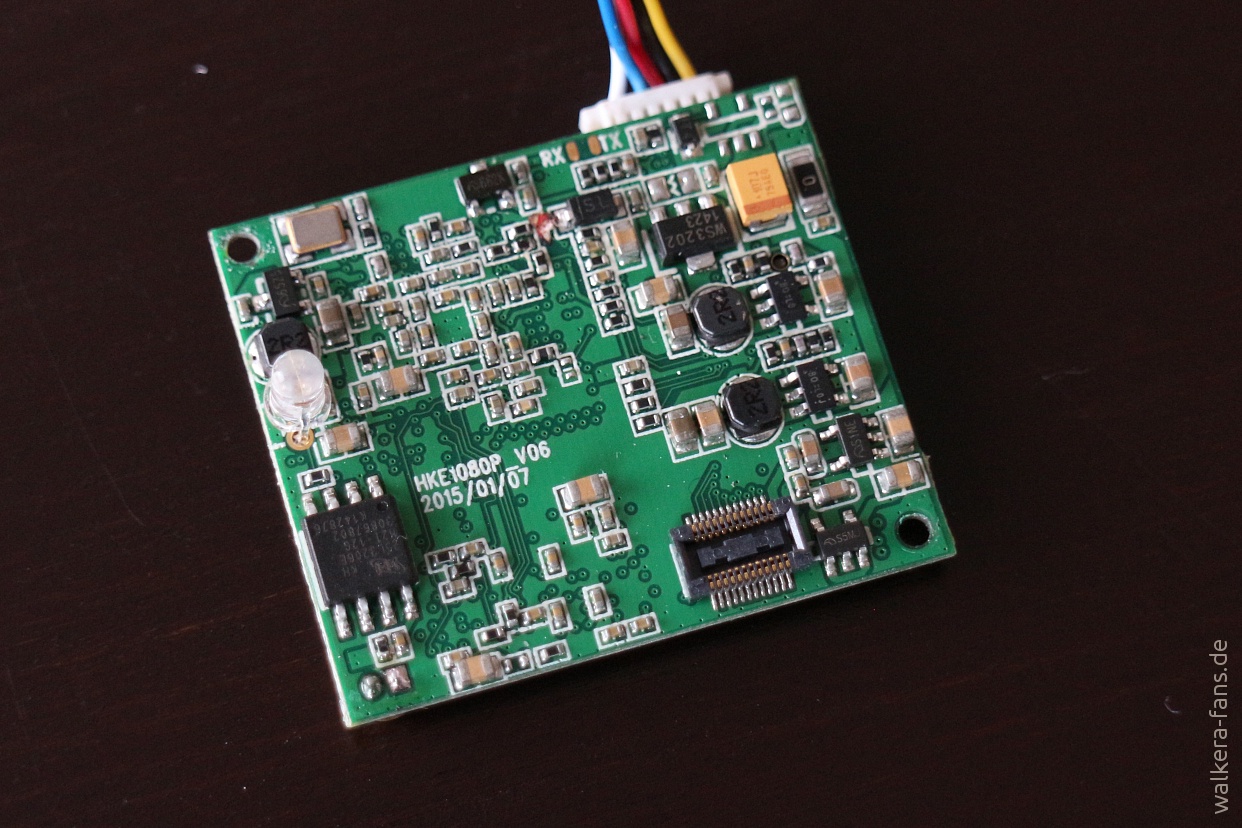
Hauptplatine
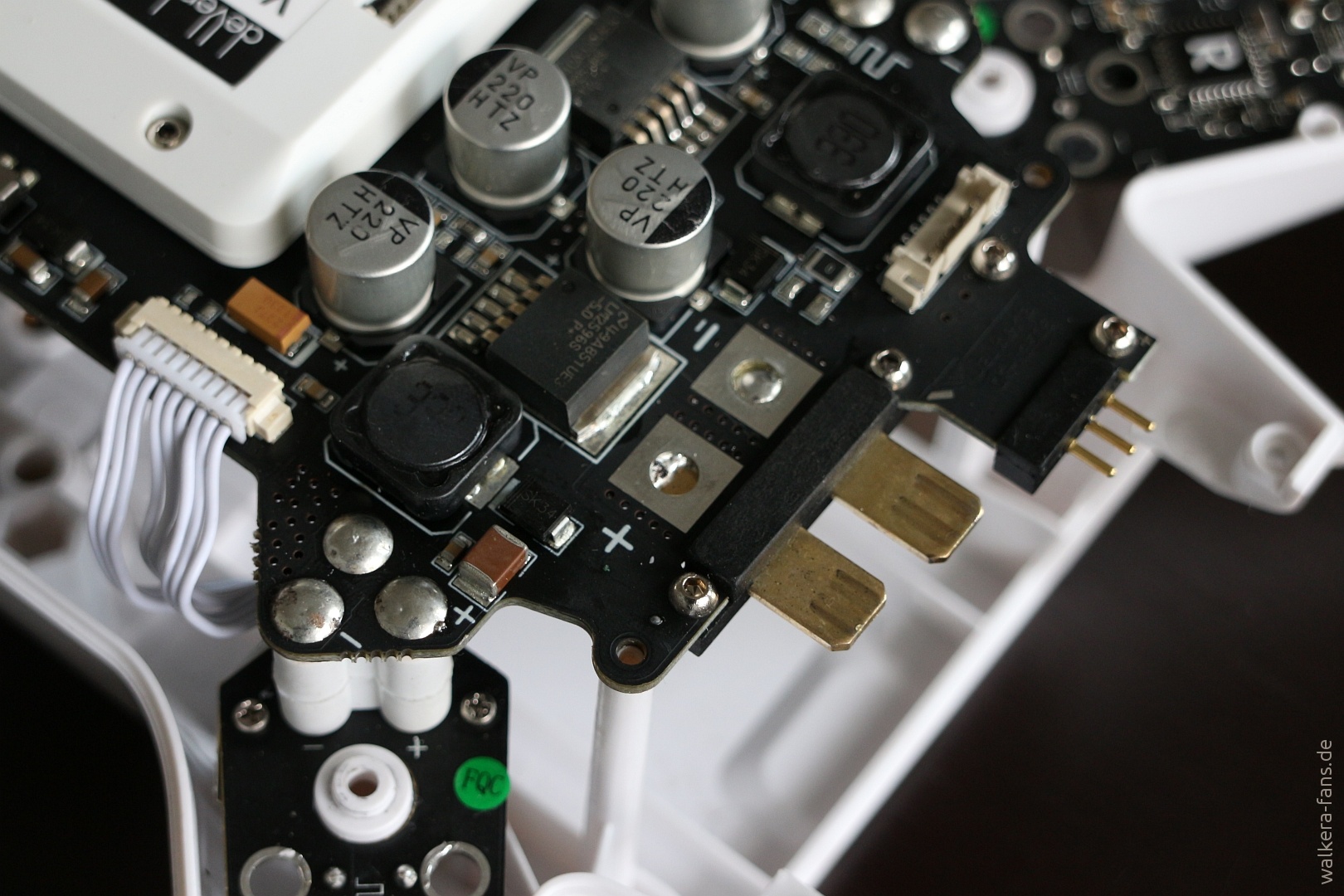
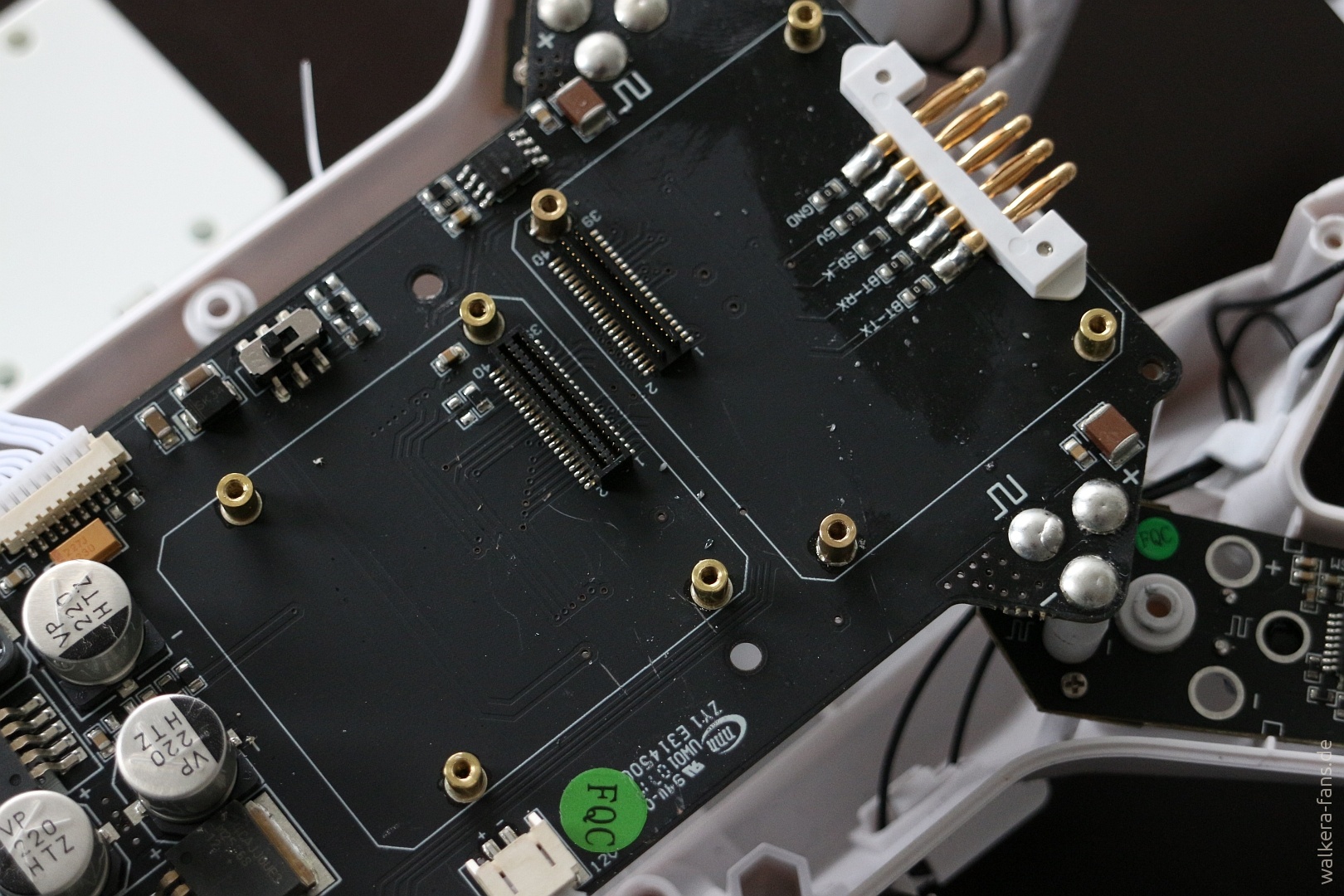
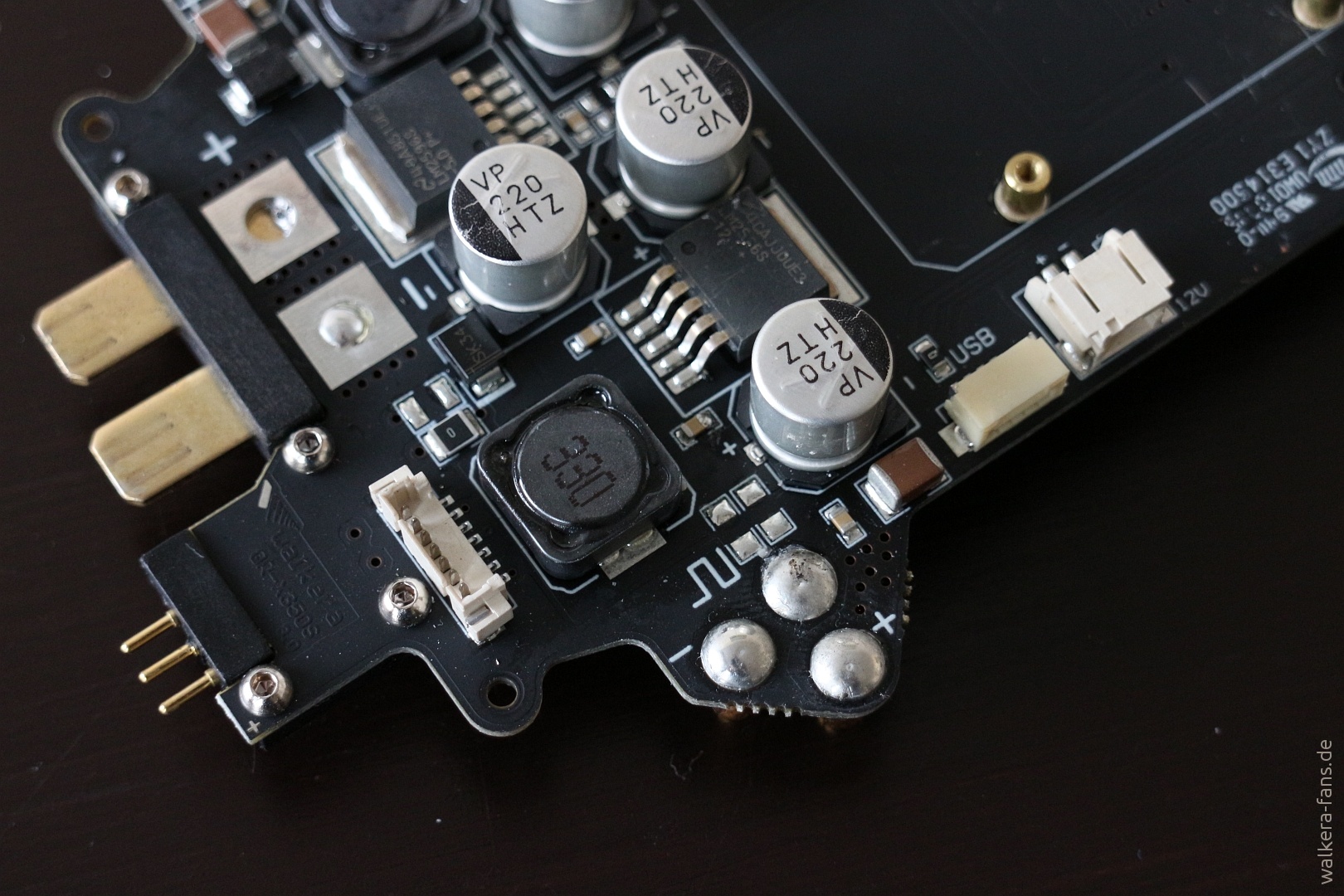
BECs für 12V und 5V:


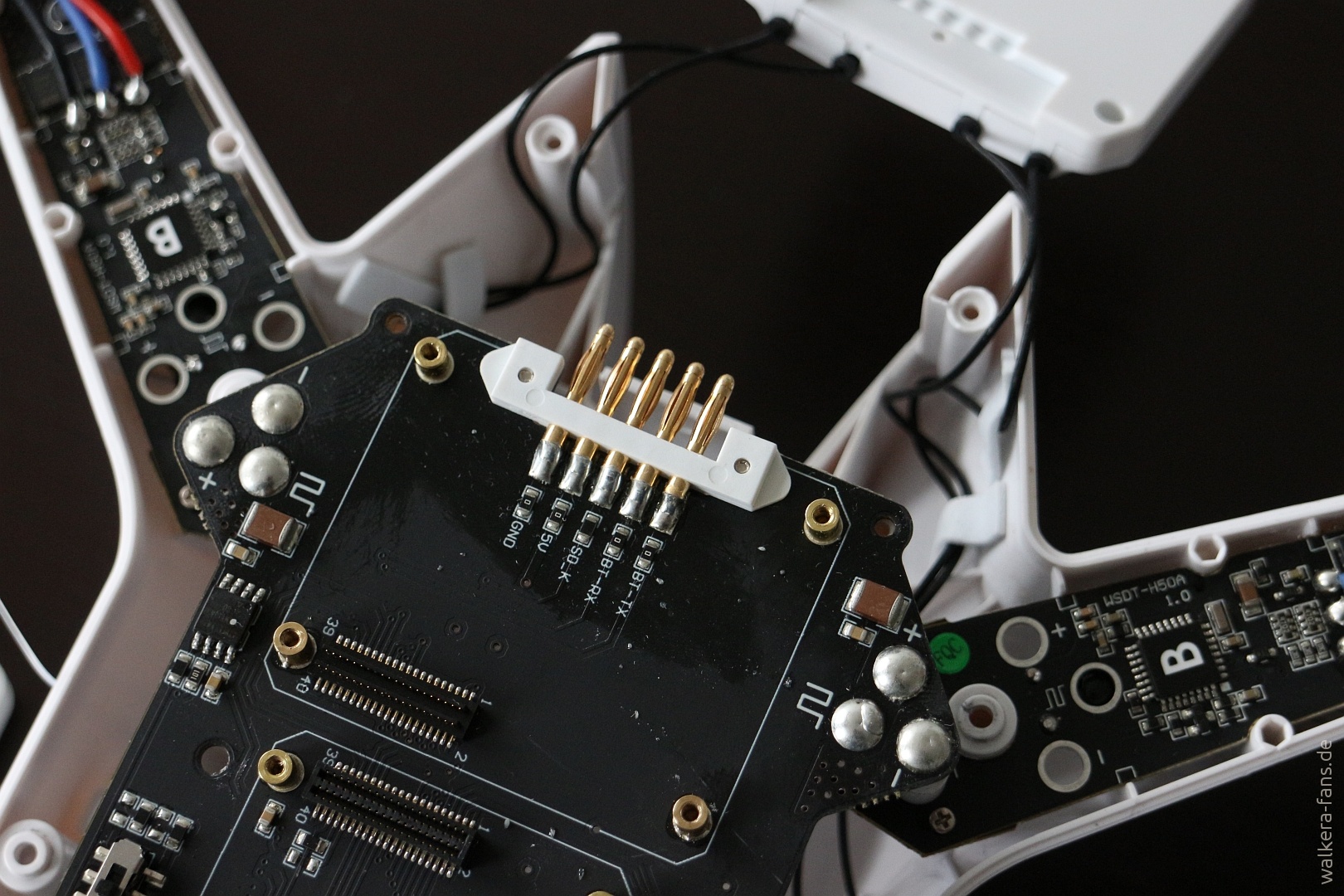
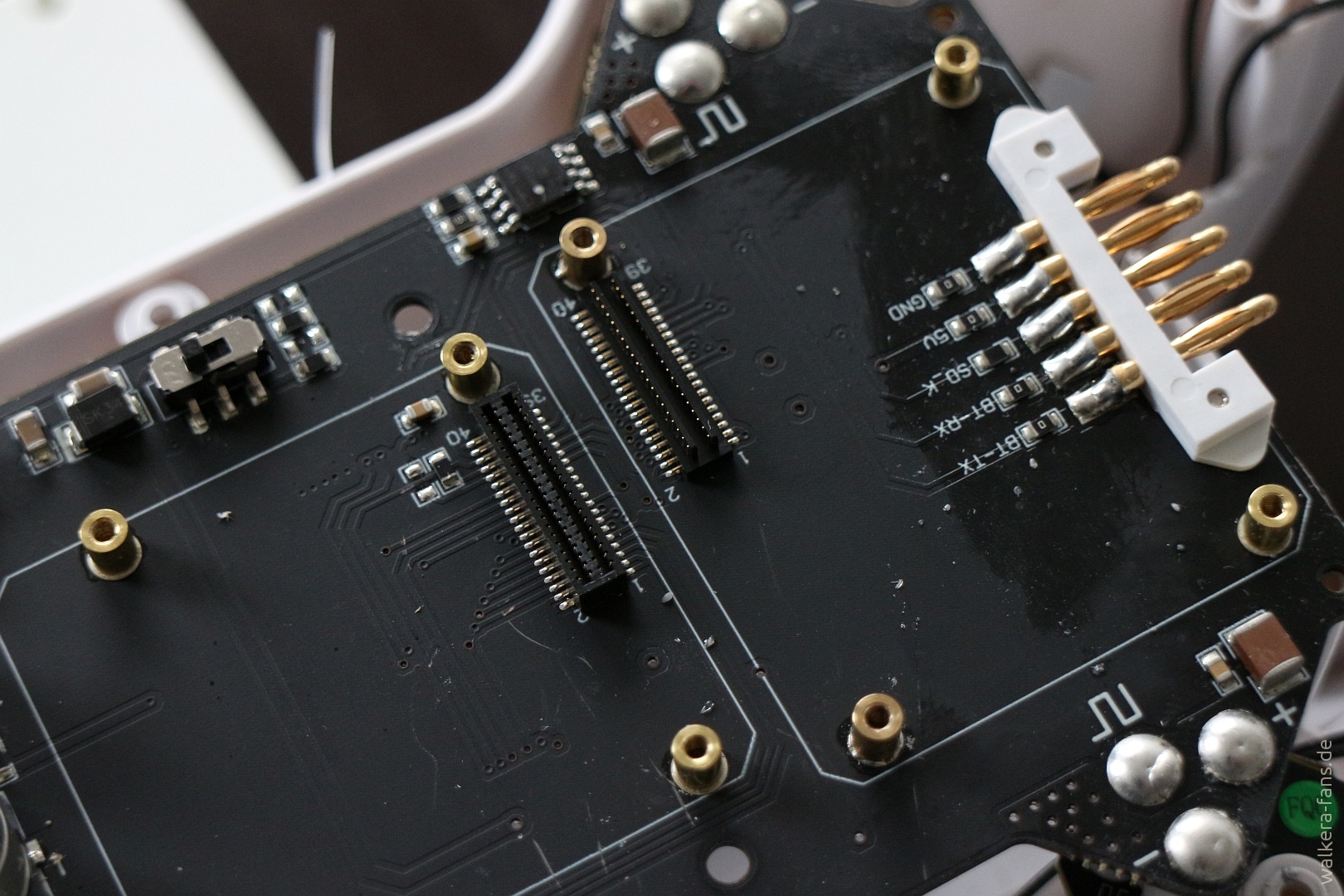
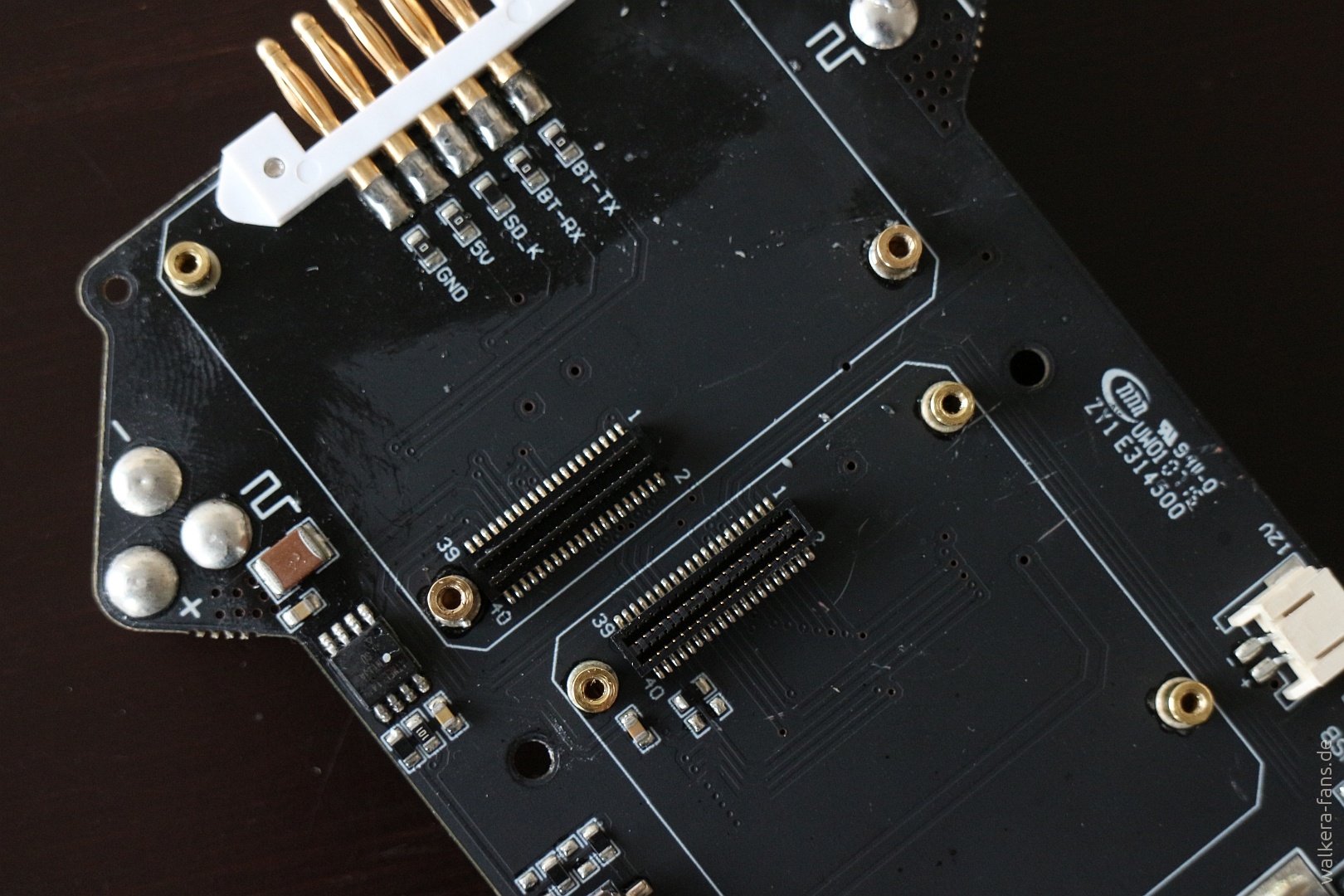
Belegung des Kamera Anschlusses:
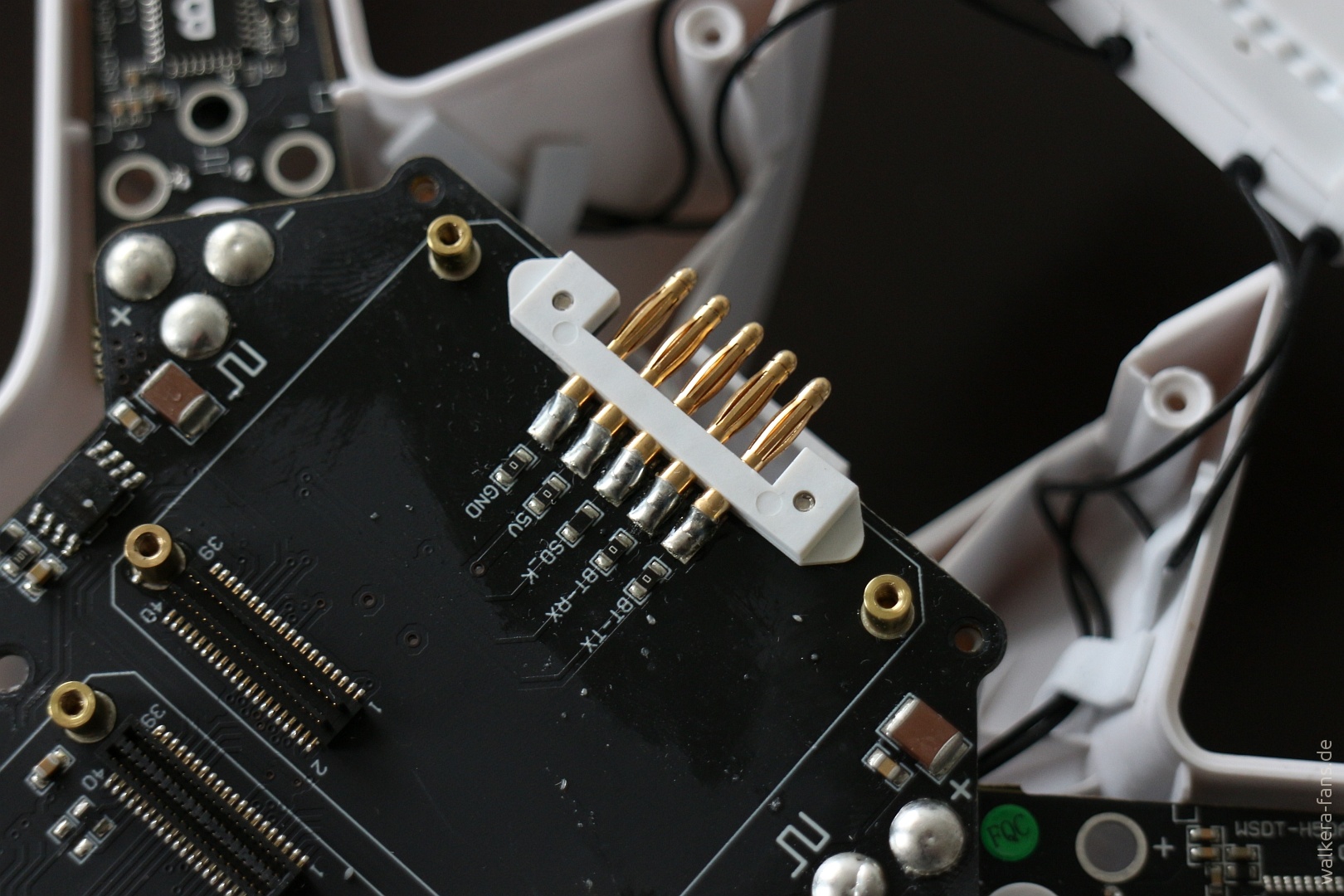
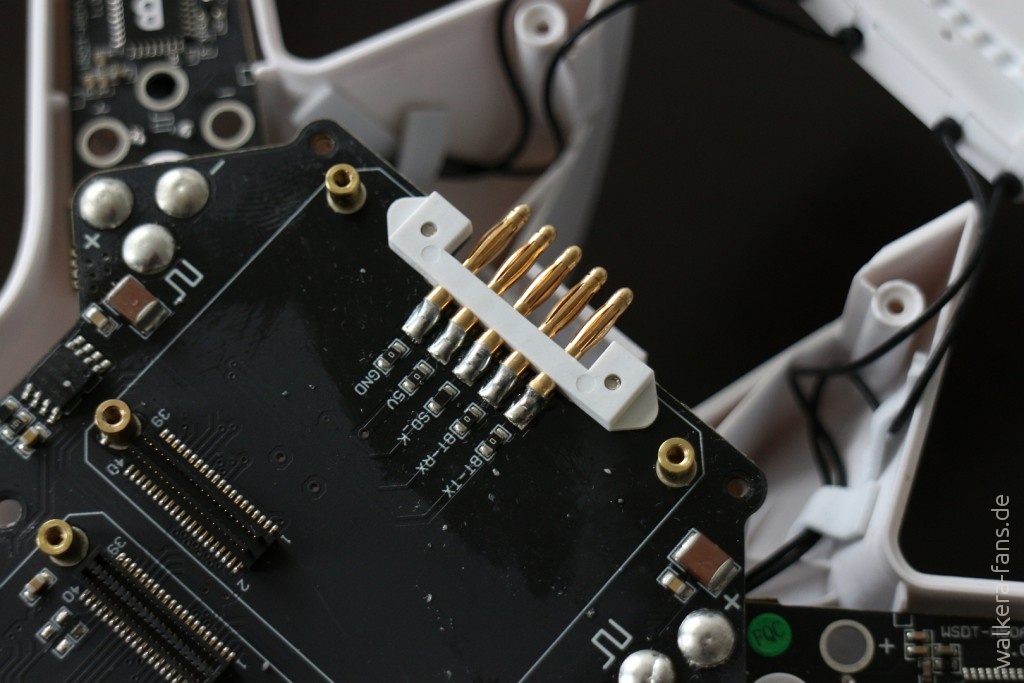
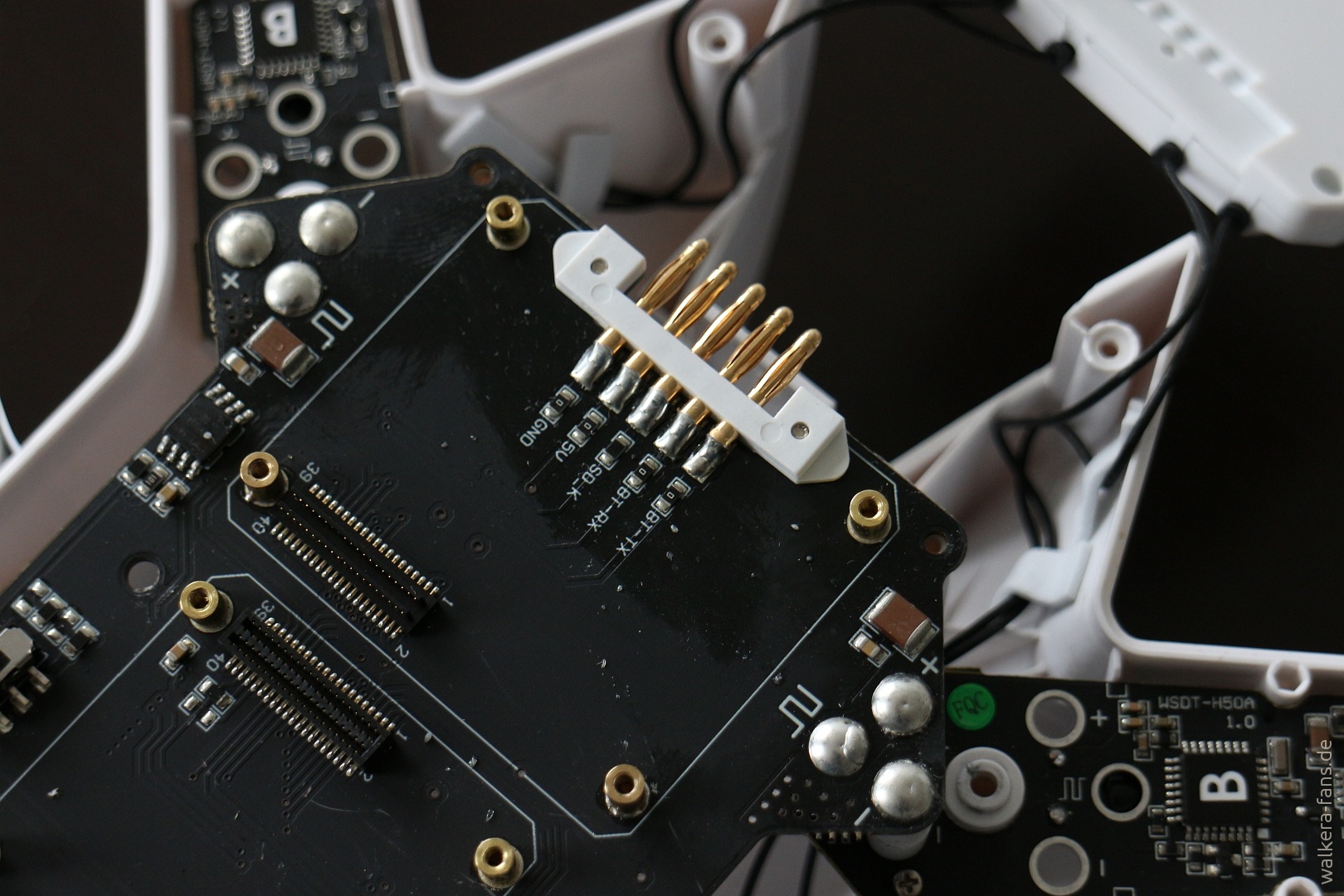
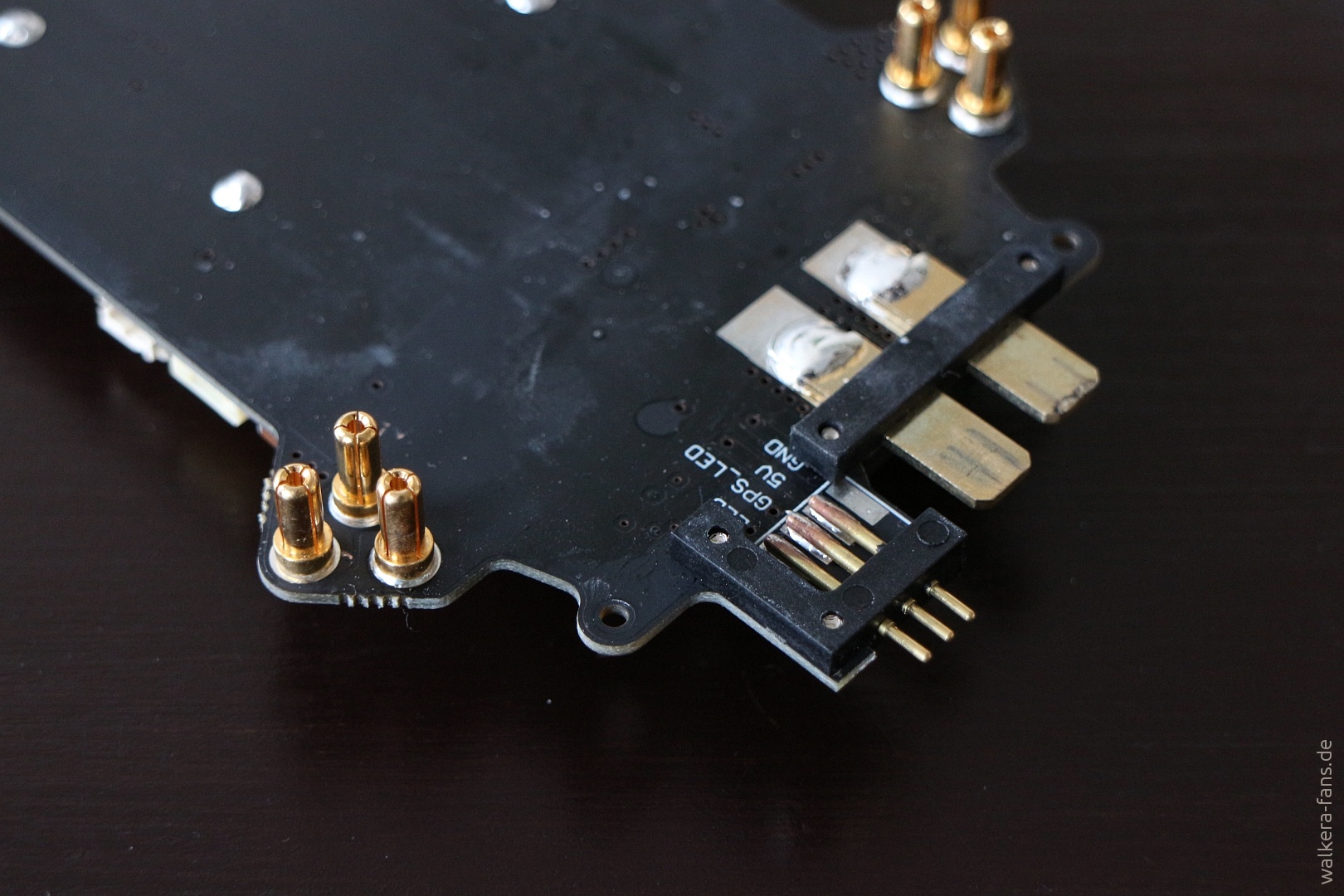
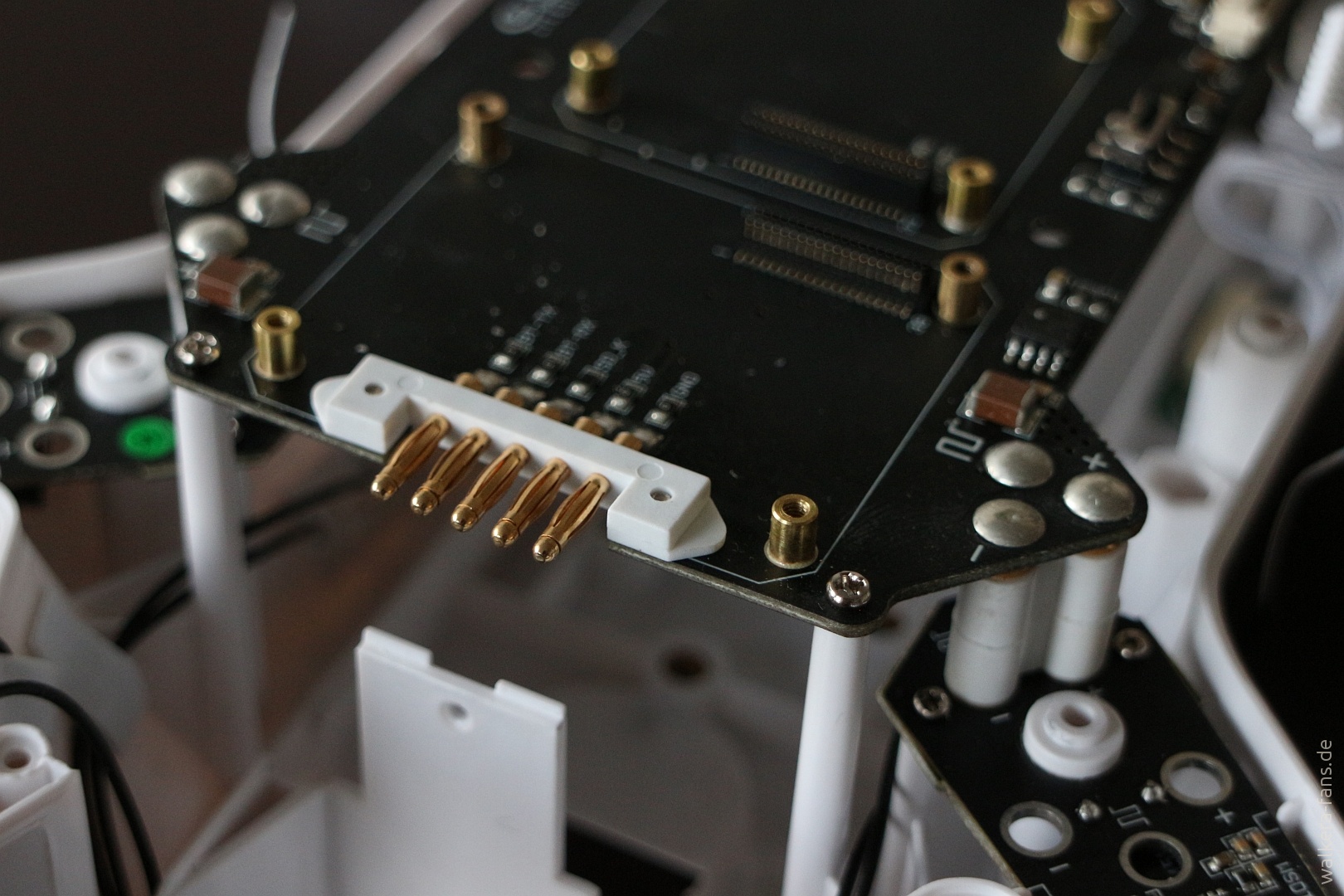
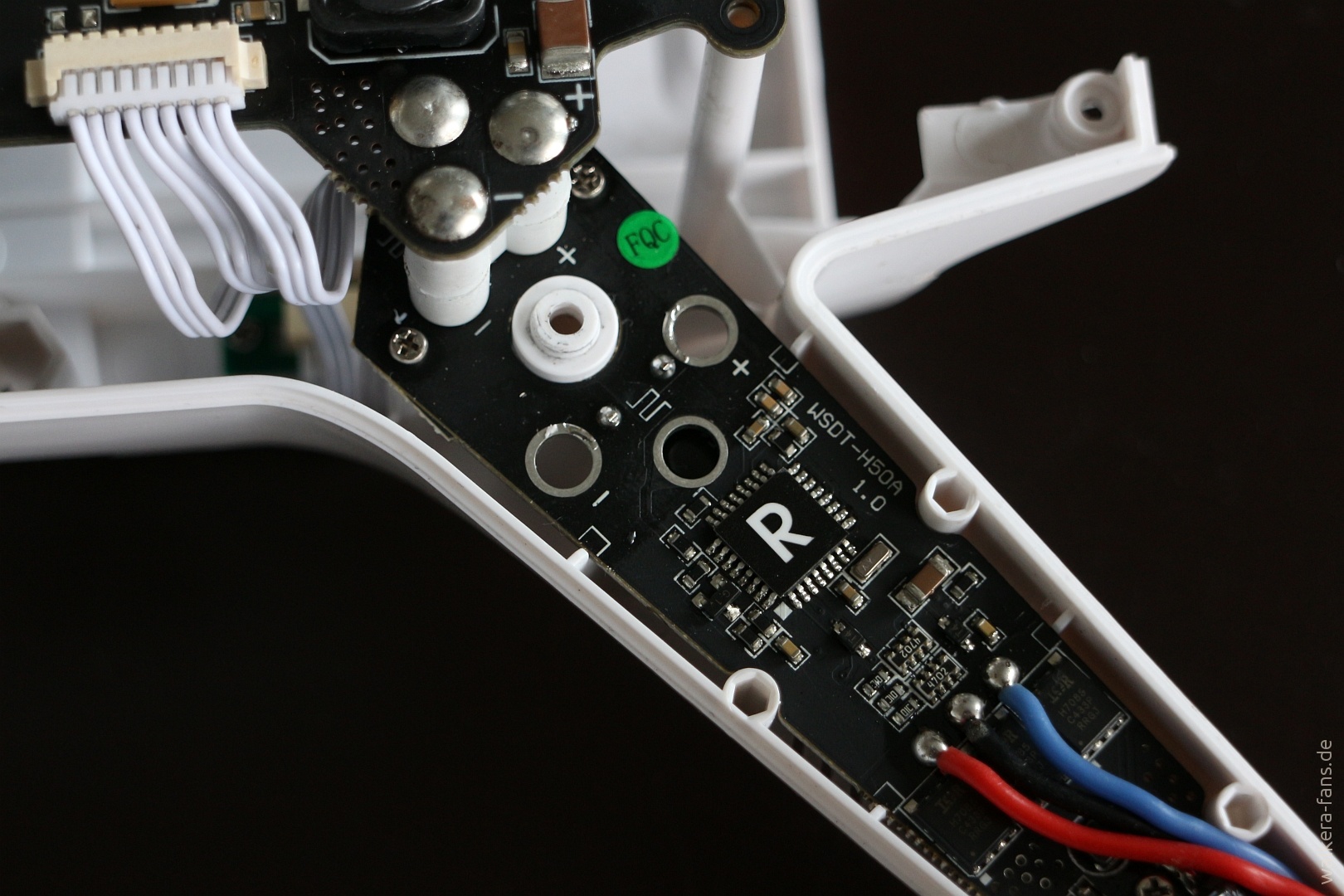
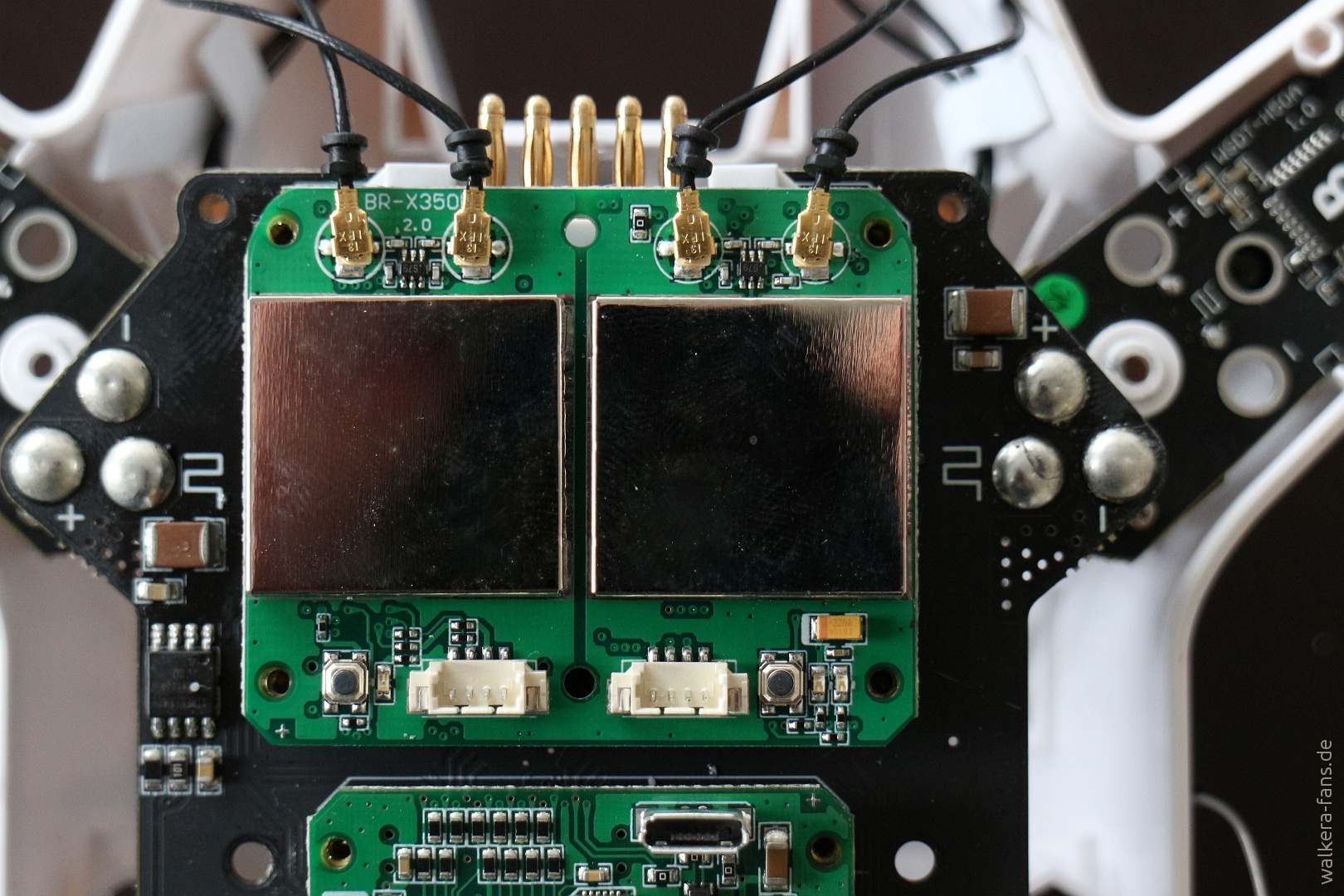
Sockel für den Empfänger (vorne) und die Flugsteuerung (hinten):
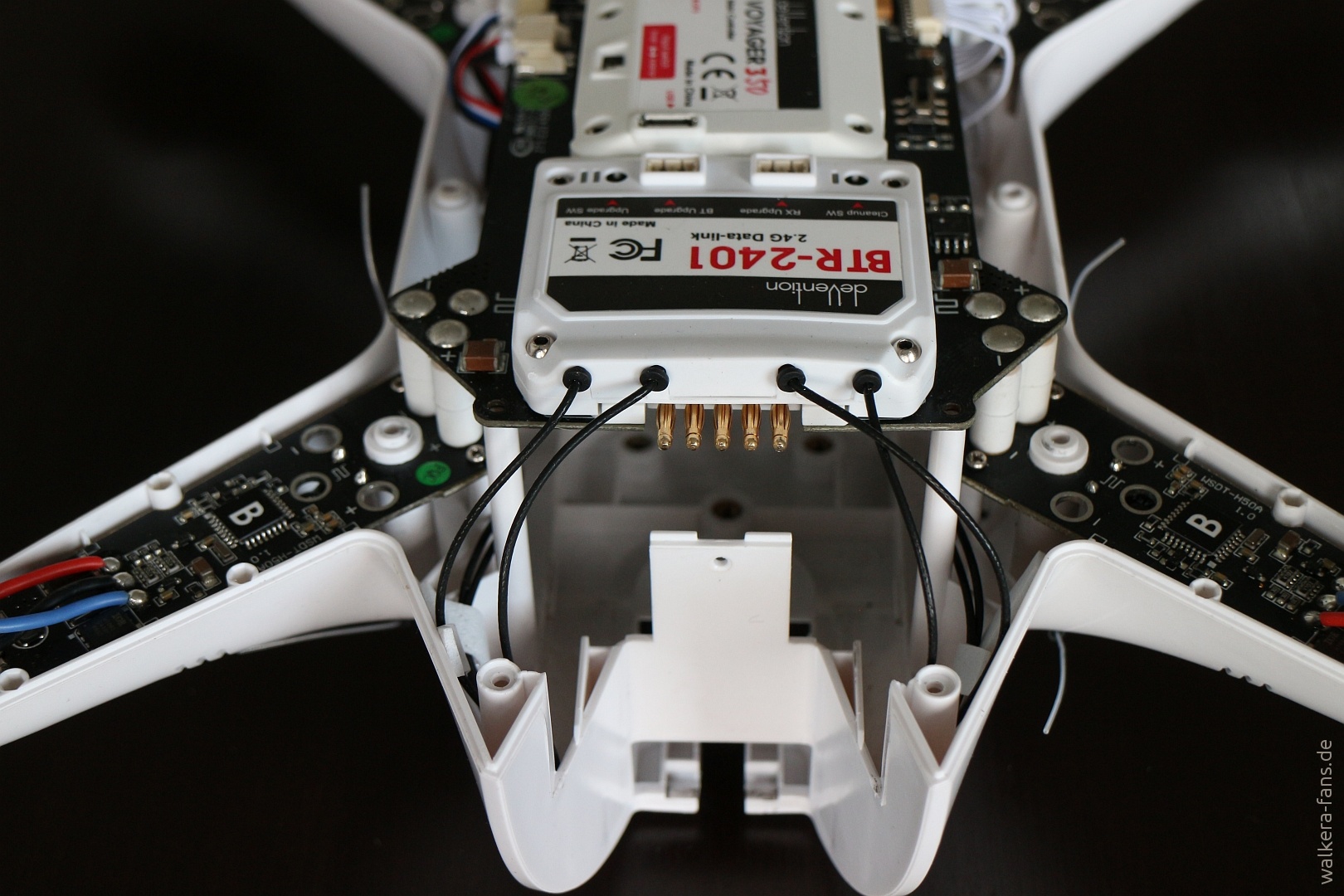
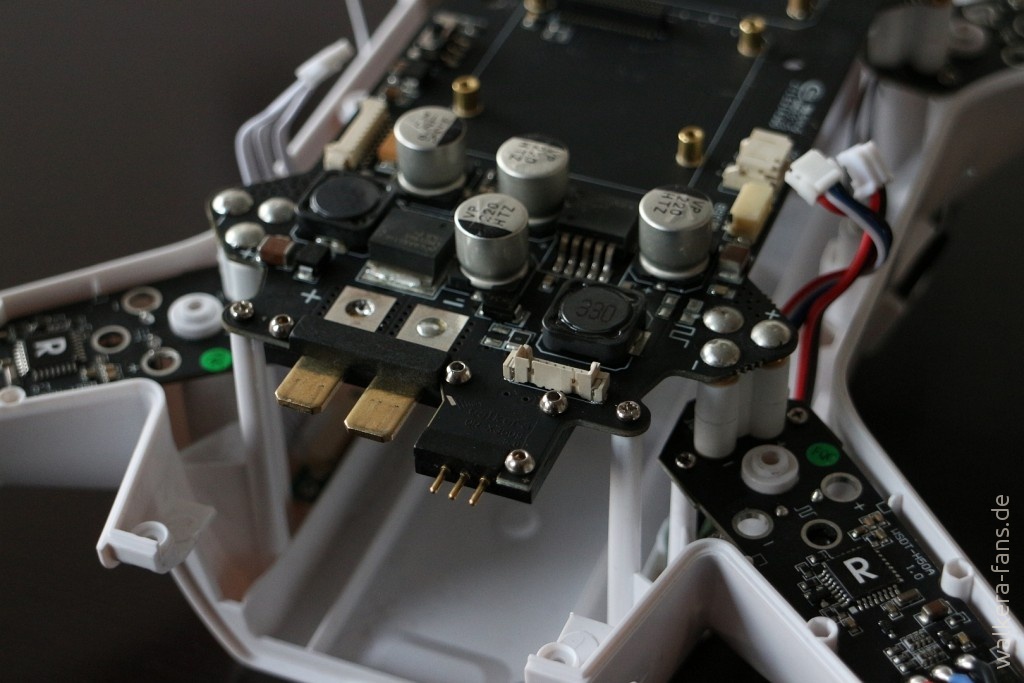
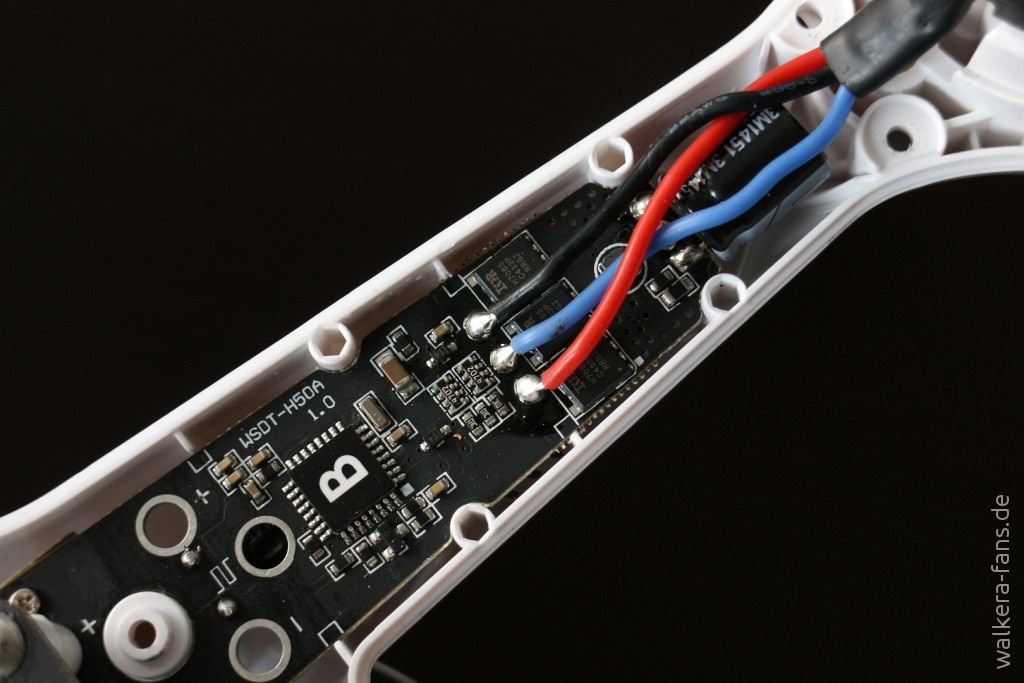
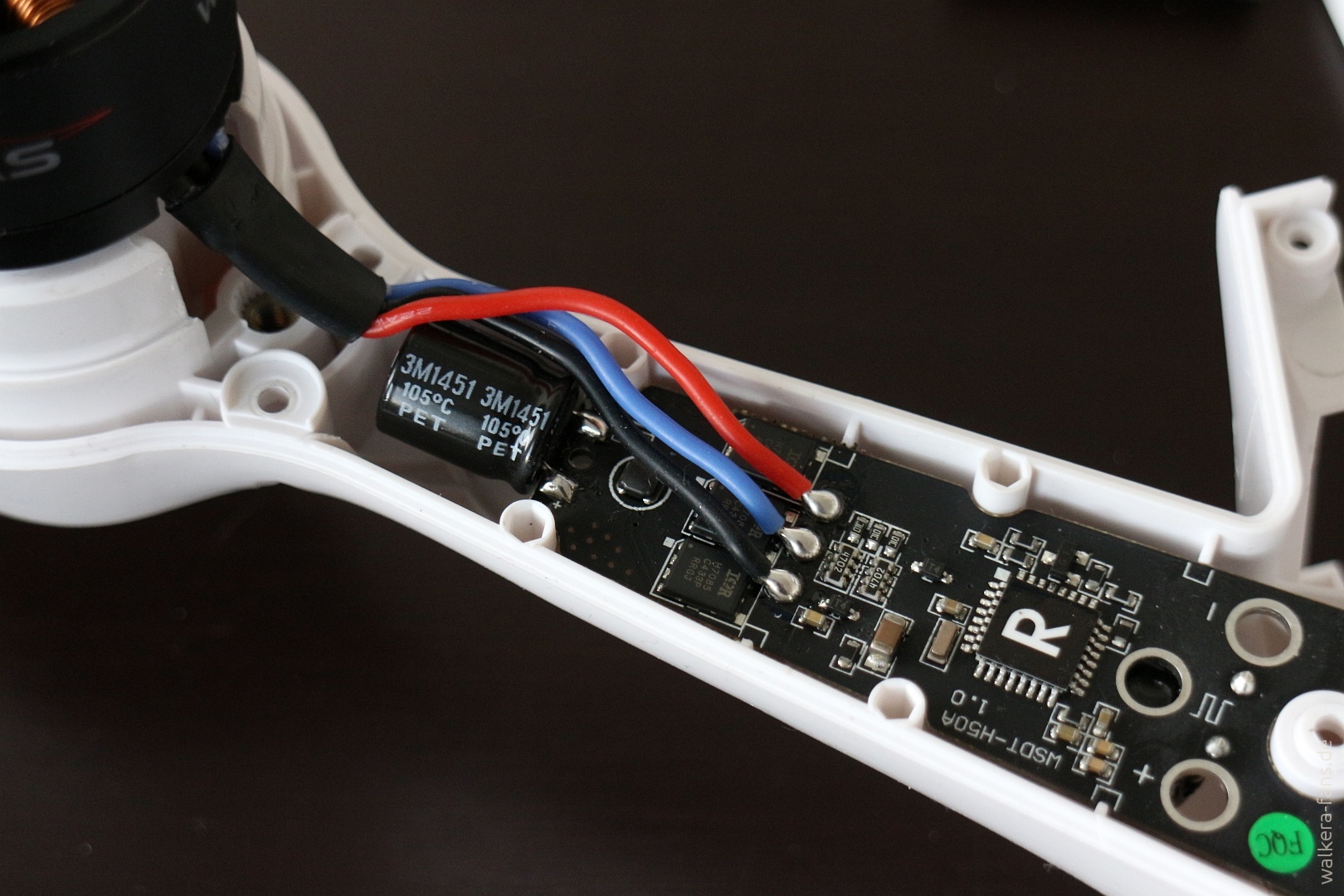
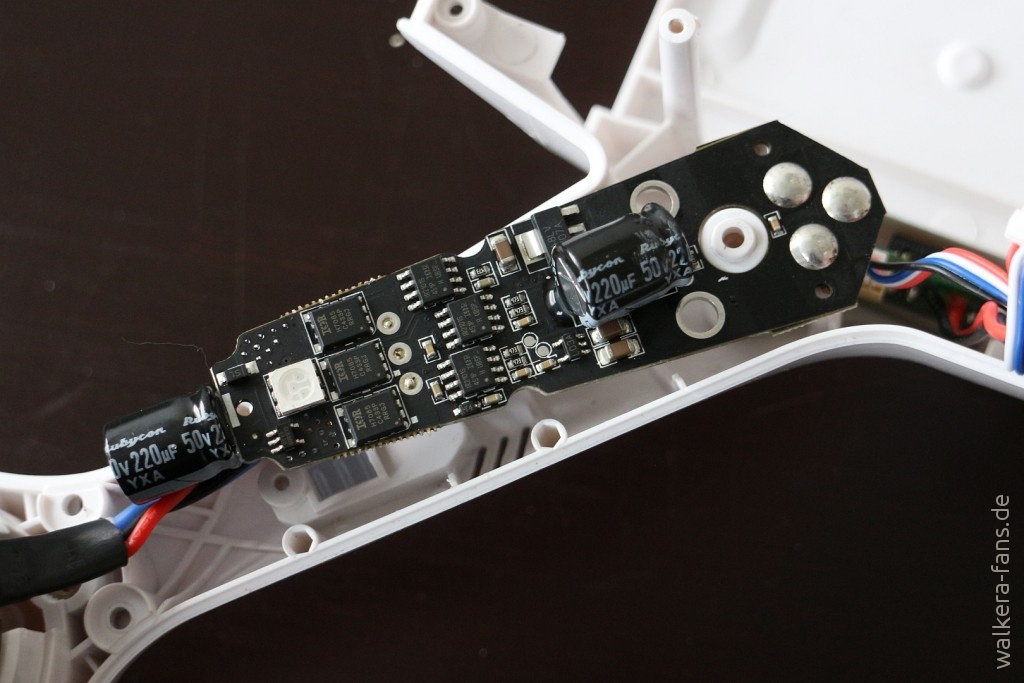
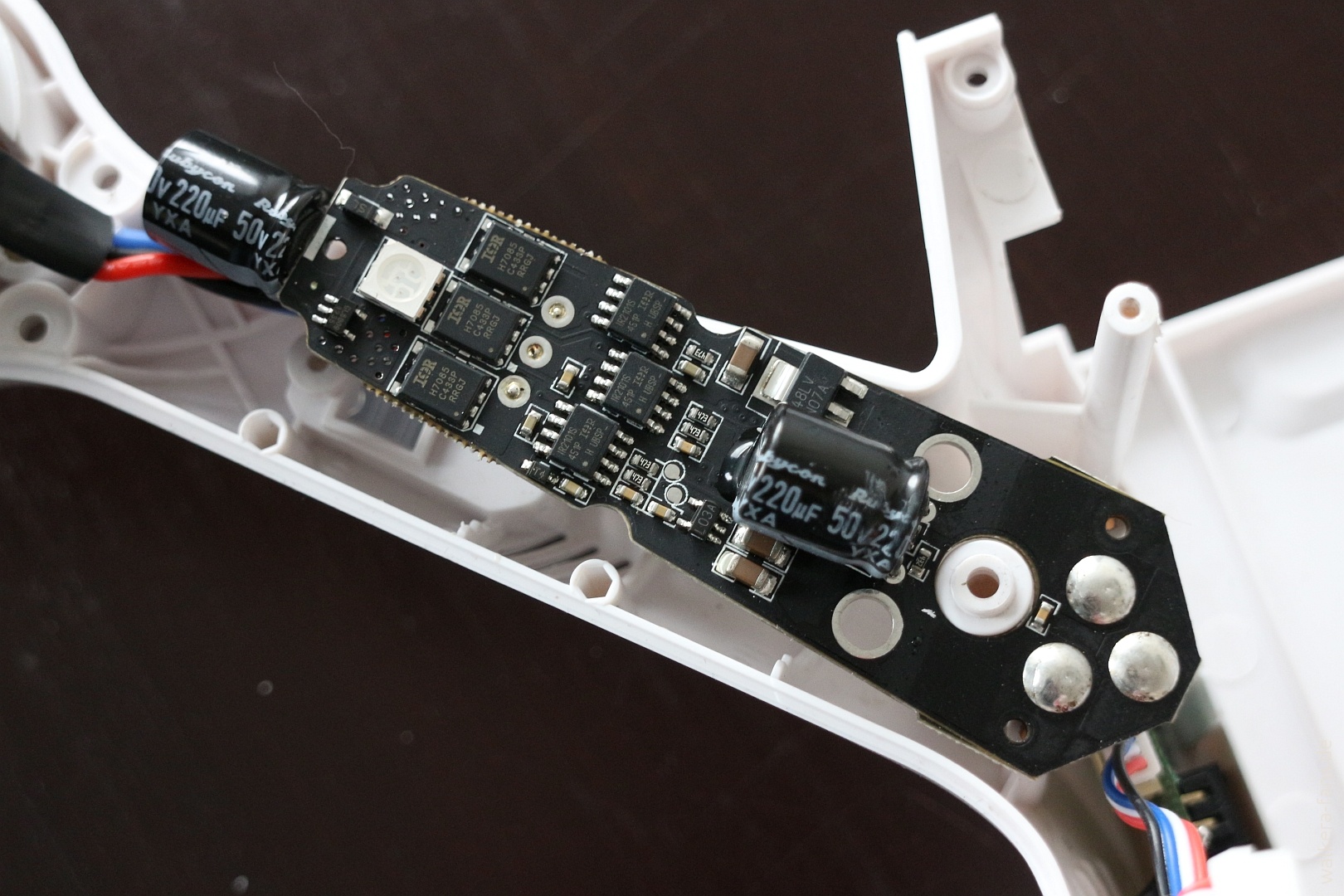
Steckverbindungen zwischen der Hauptplatine und den Reglern:

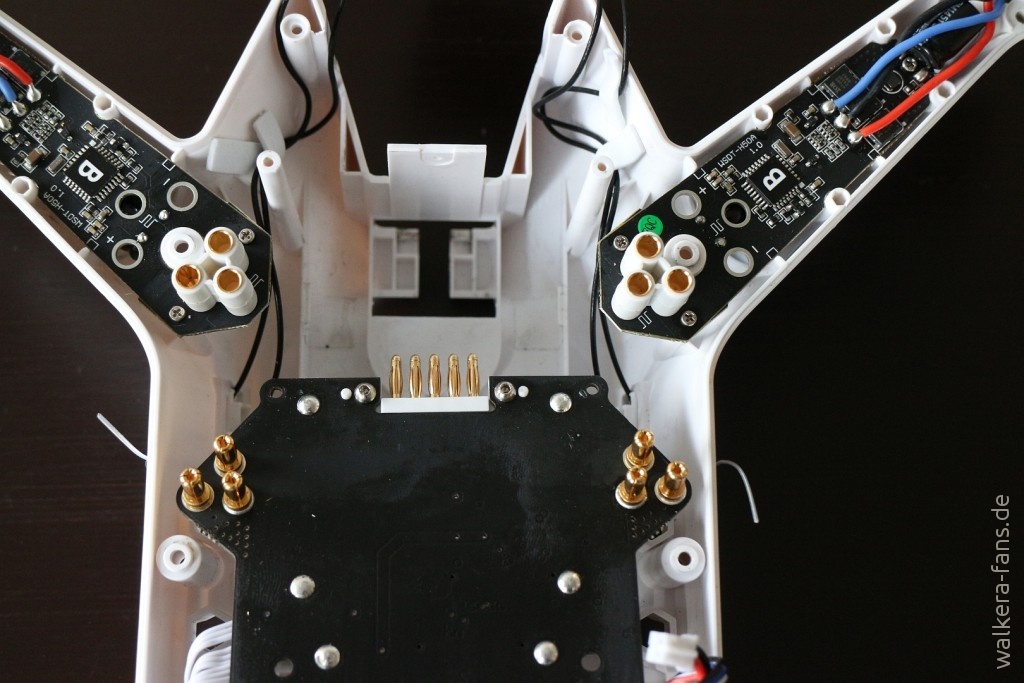

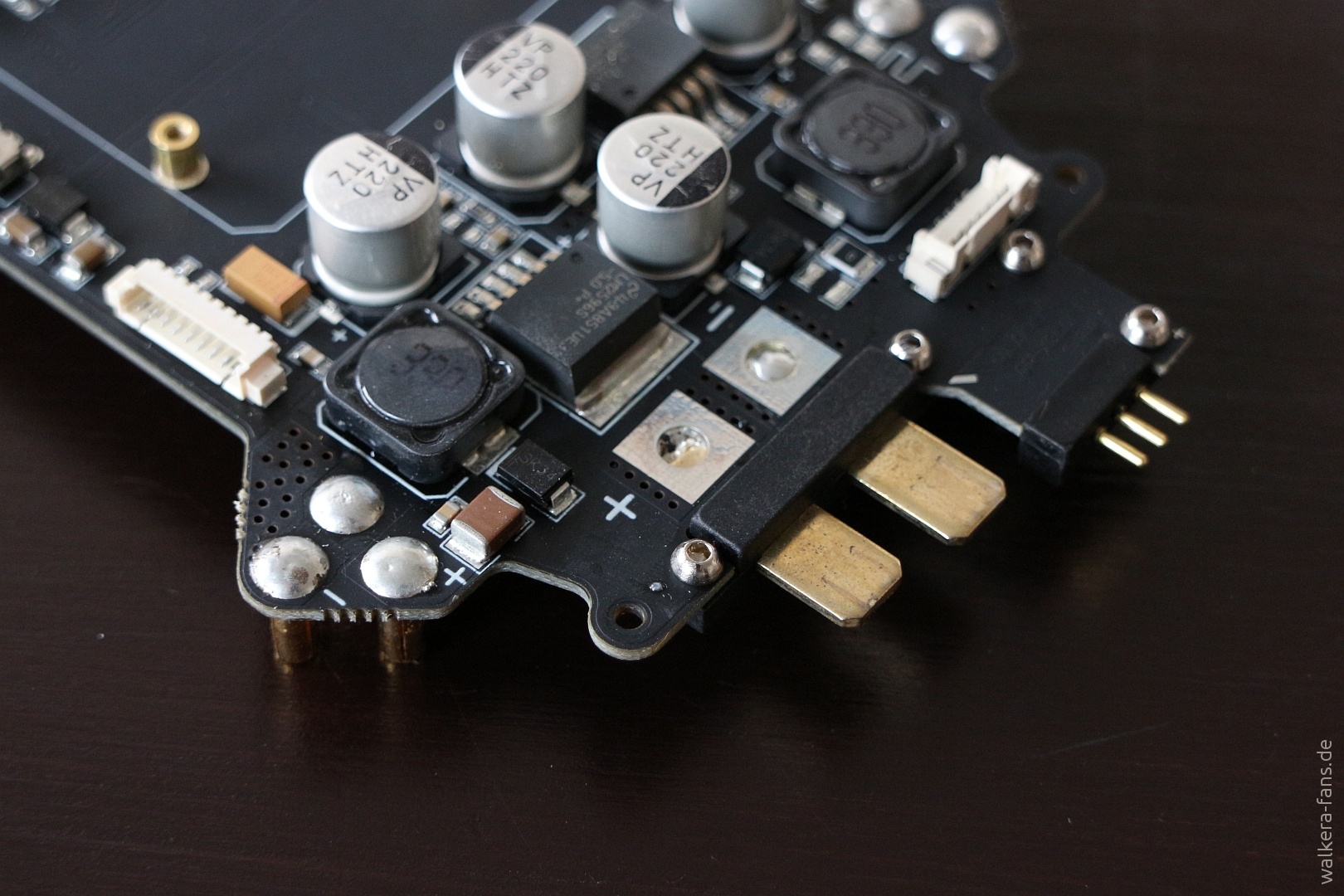
Ich habe probeweise Schrauben in diese Halterungen geschraubt, habe sie dann vor dem Zusammenbauen wieder entfernt. Ab Werk waren keine Schrauben drin. Die Platine hält auch ohne Schrauben perfekt.

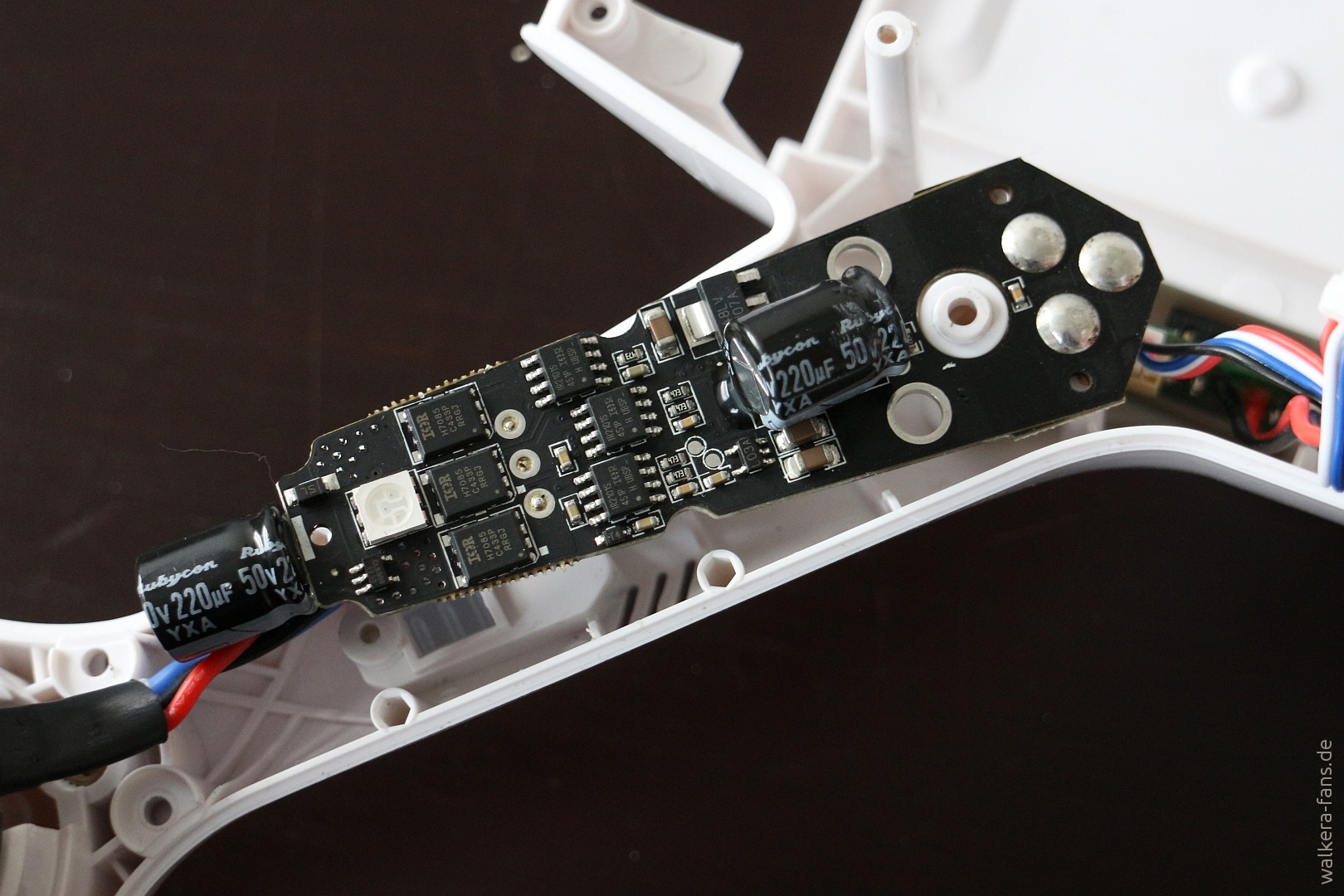
Regler
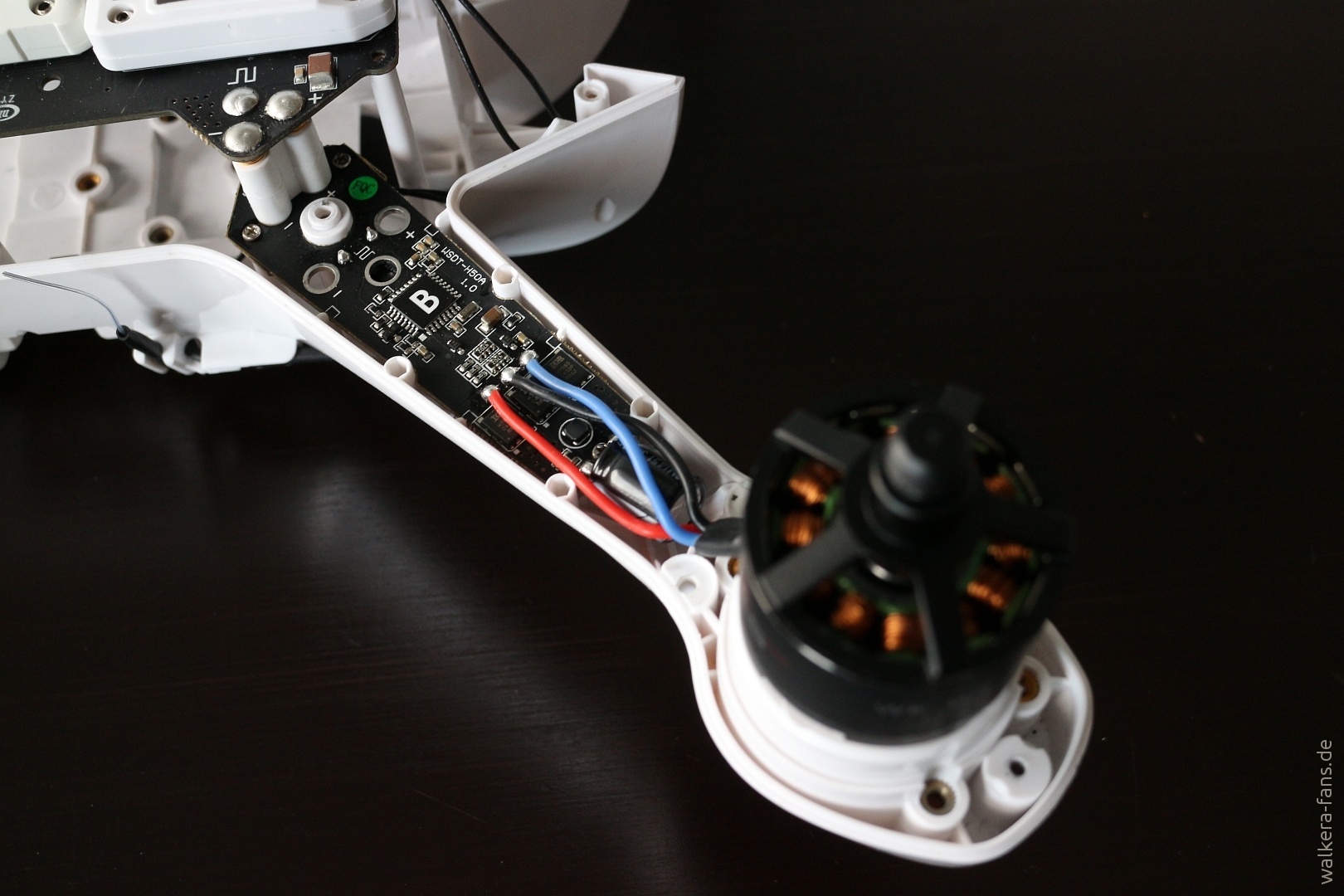
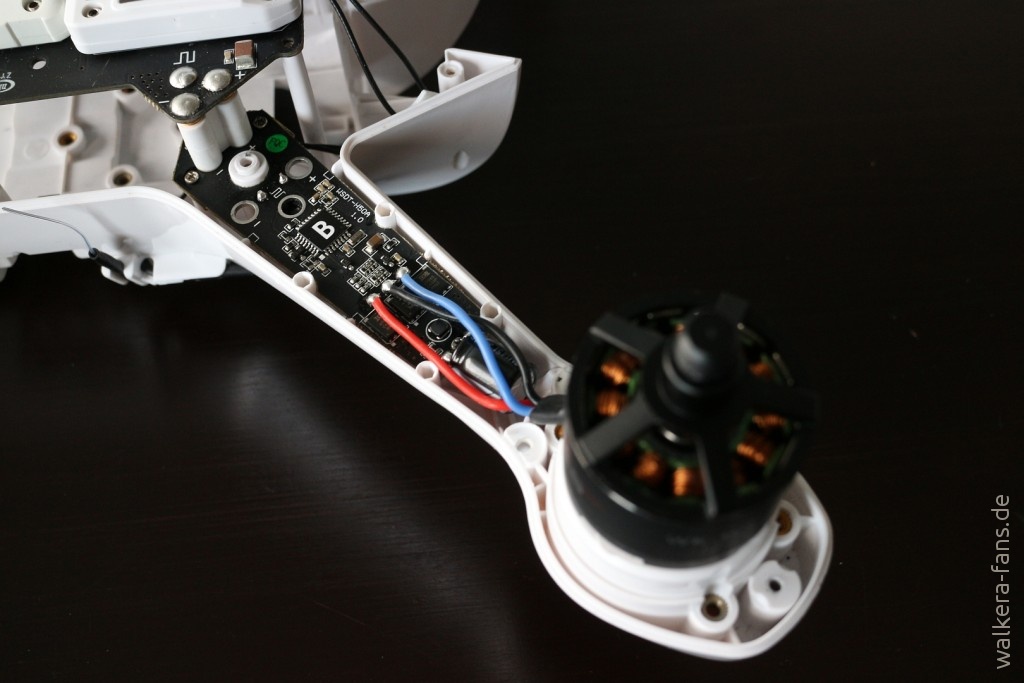

Gut verlötet:
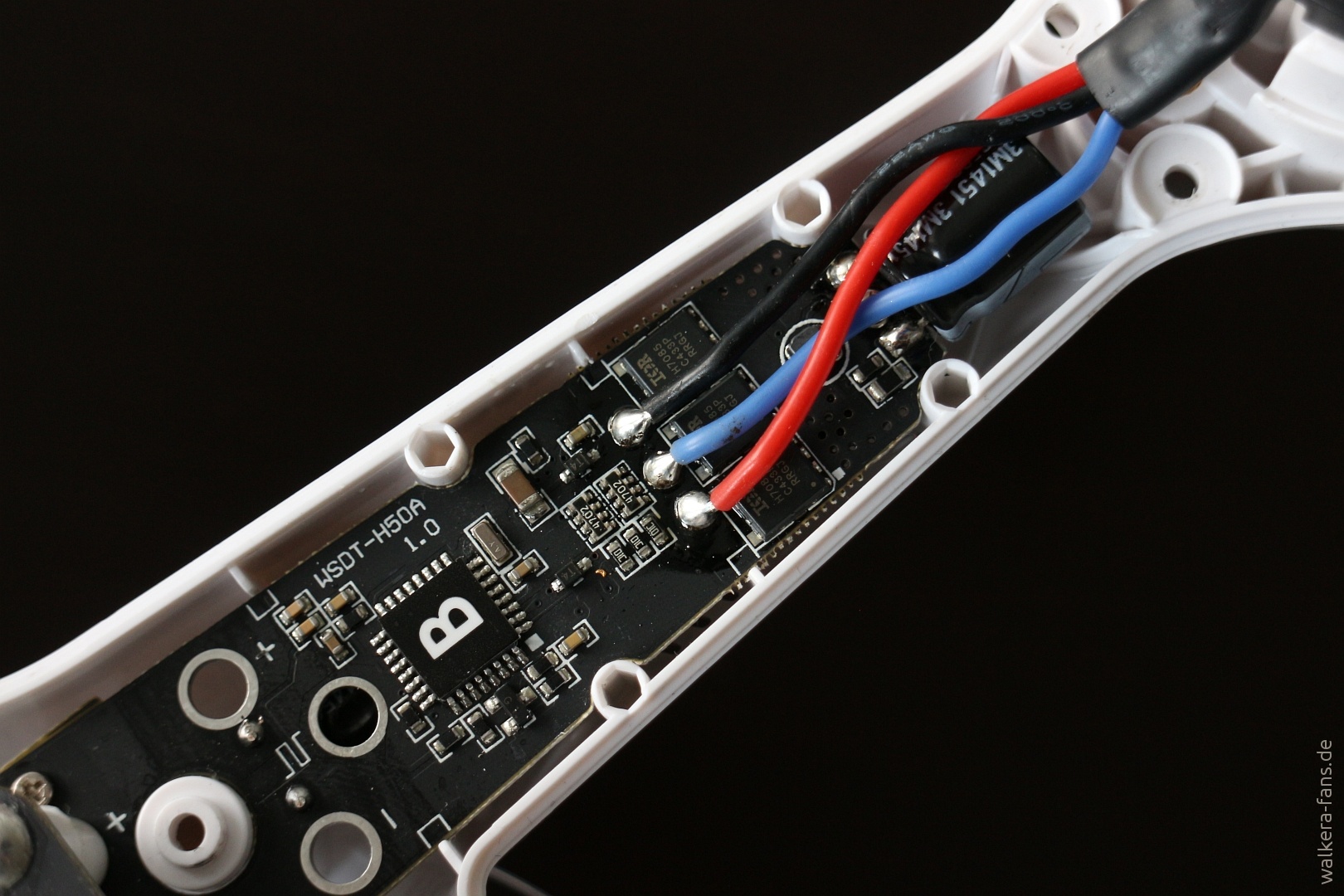
Sogar die LEDs sind durchdacht: Es sind RGB LEDs, sodass Walkera die Regler nur durch Programmierung in ihrer Farbe umstellen kann:



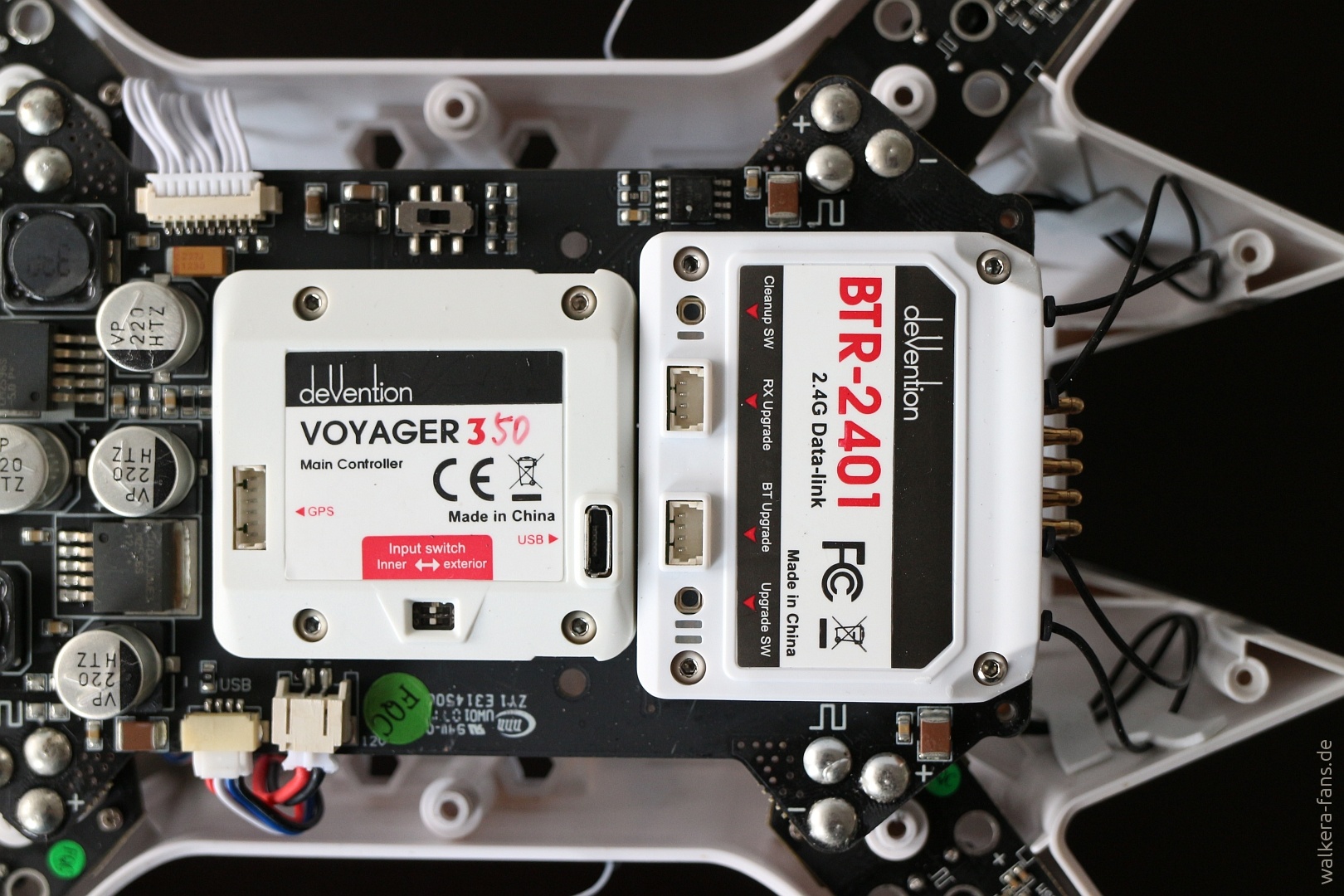
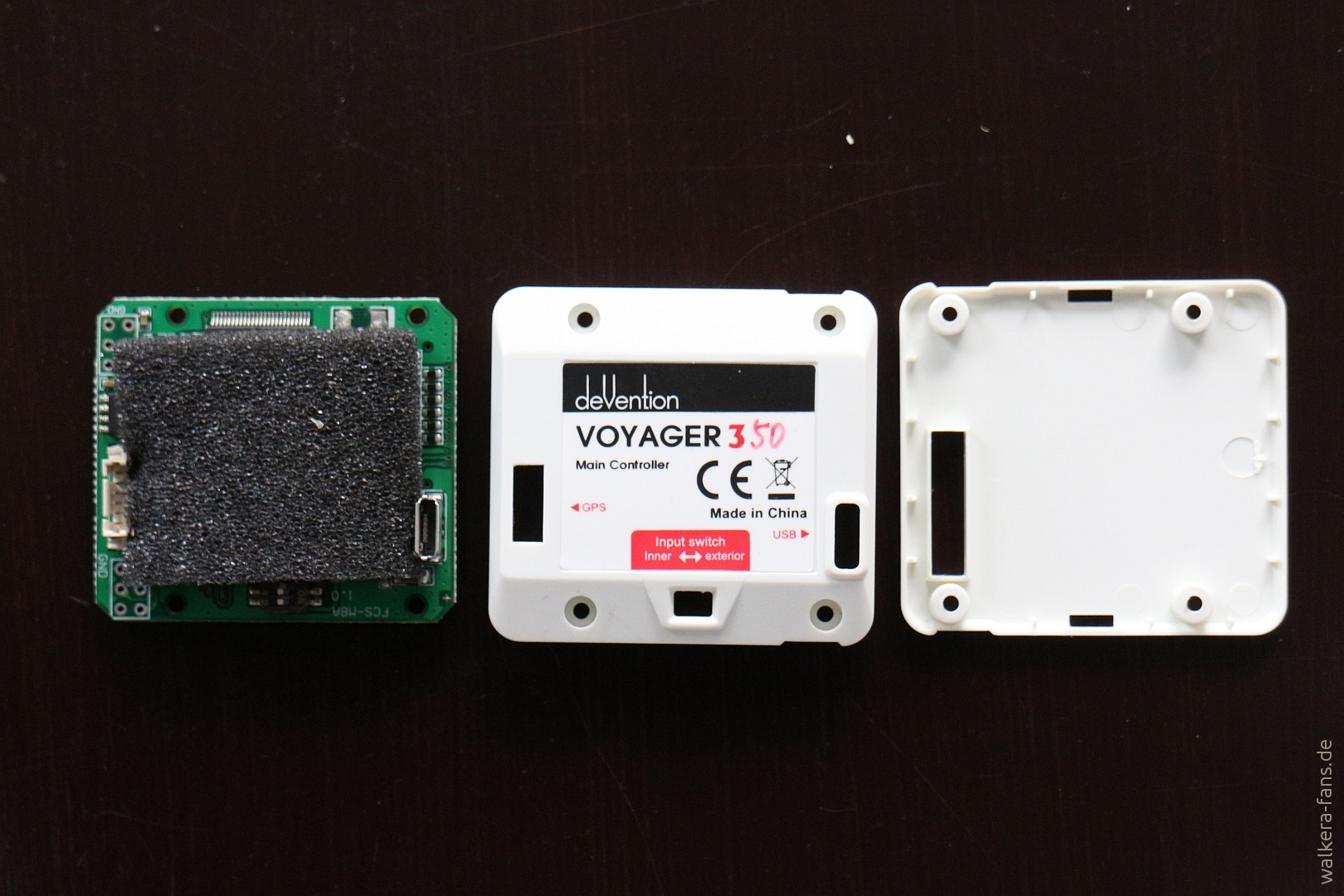
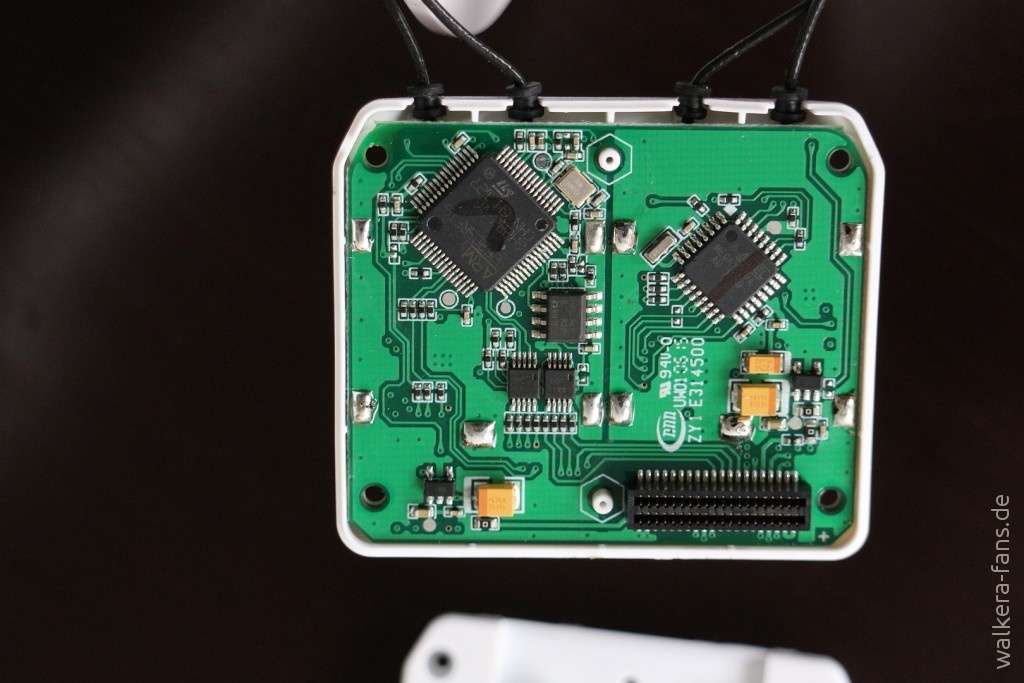
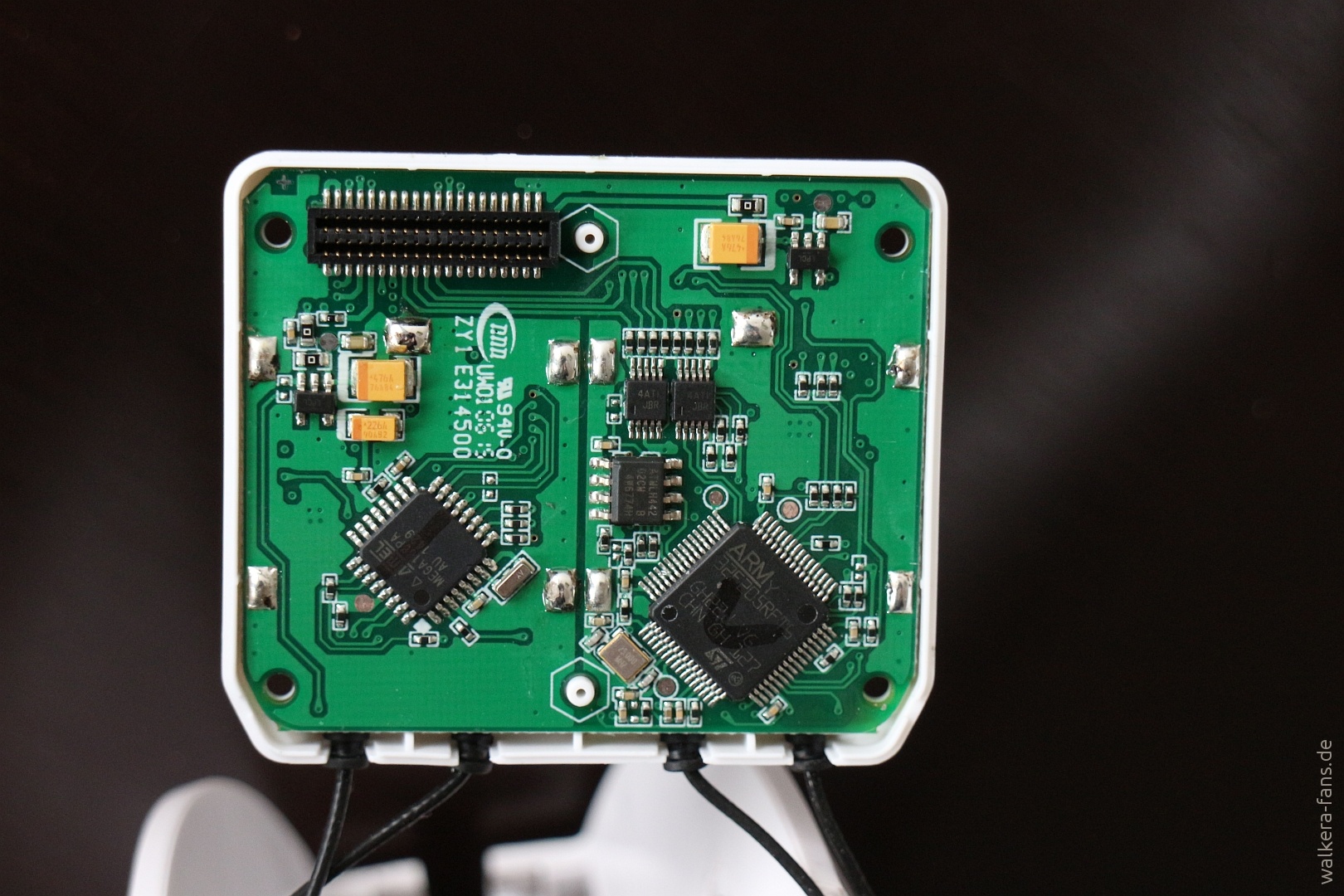
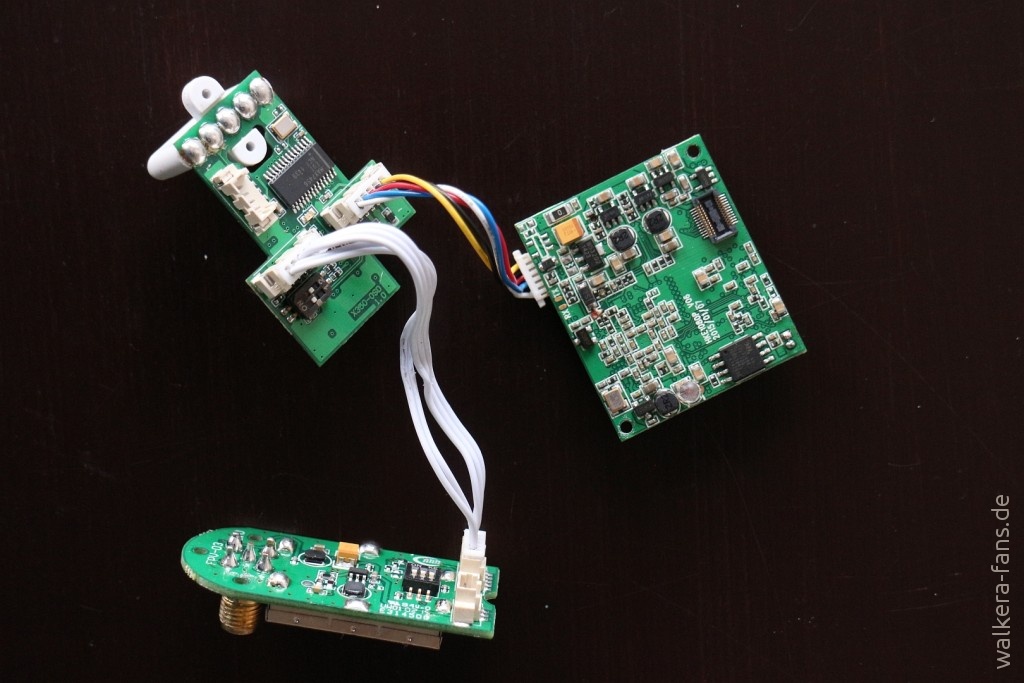
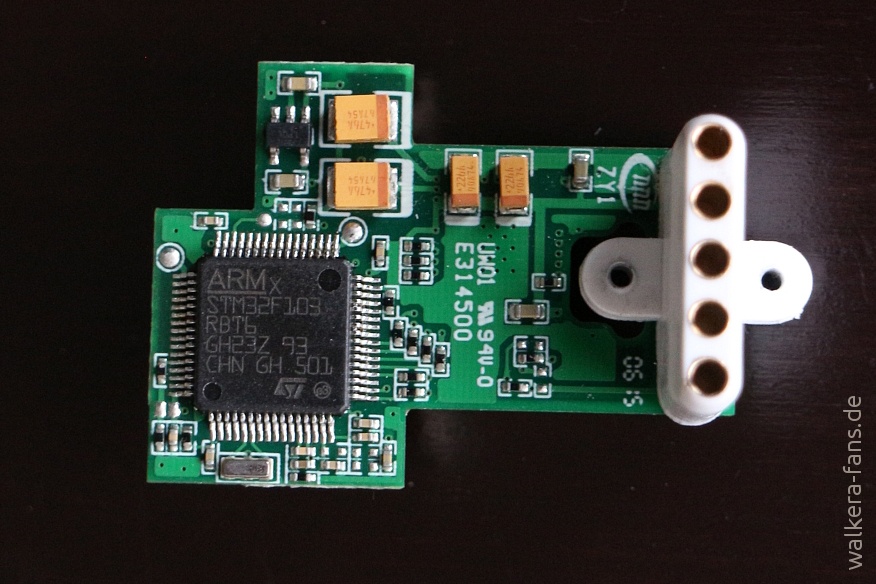
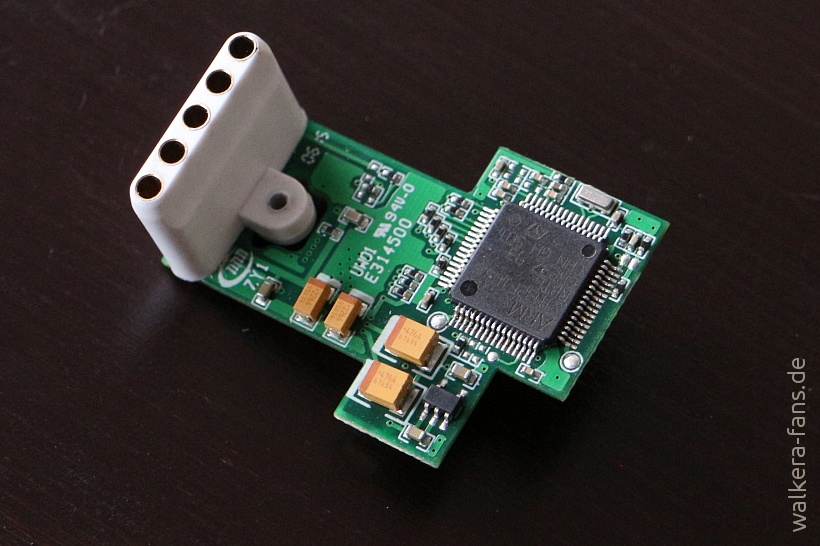
Flugsteuerung und Empfänger / Ground Station Einheit
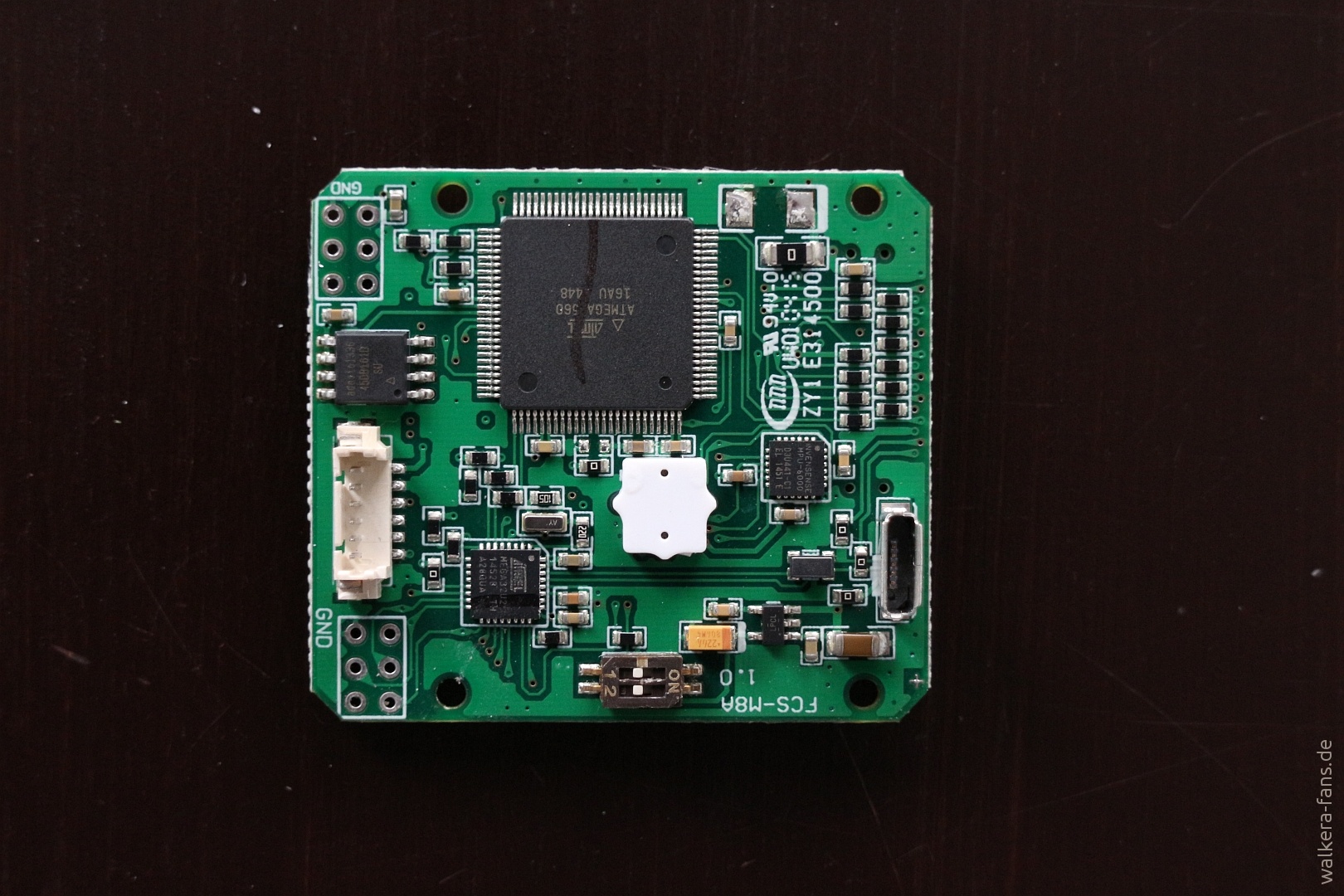
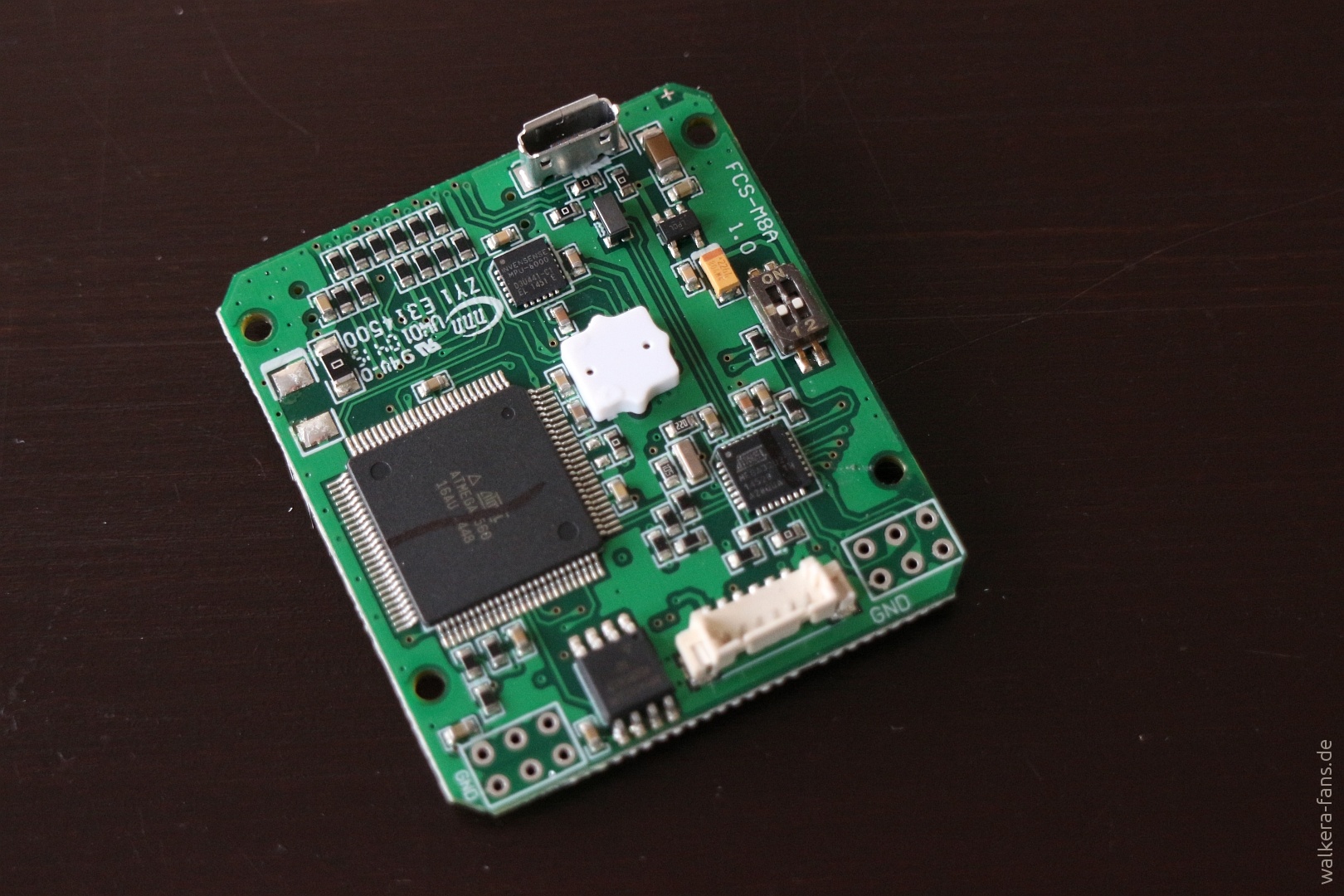
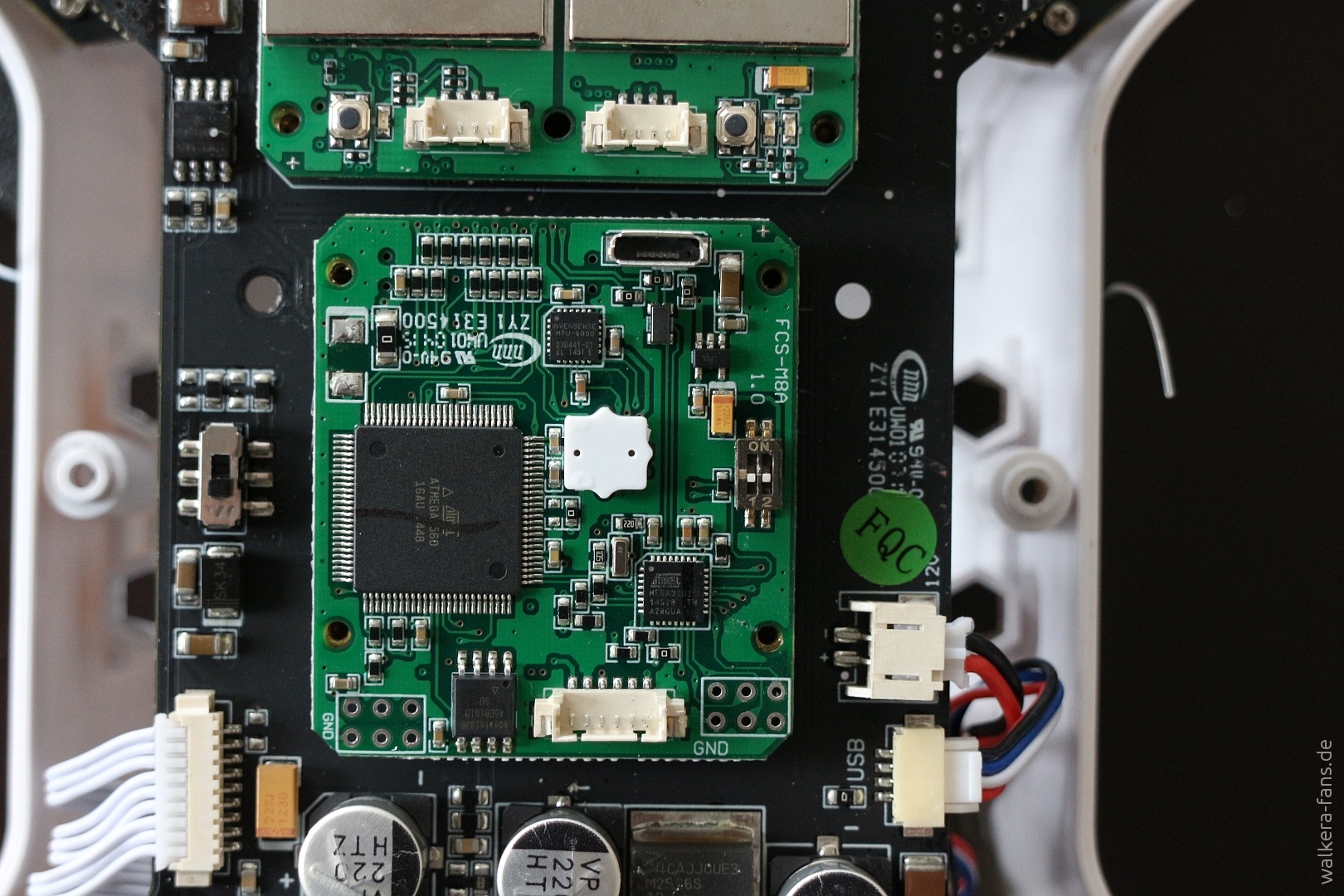
Flugsteuerung:
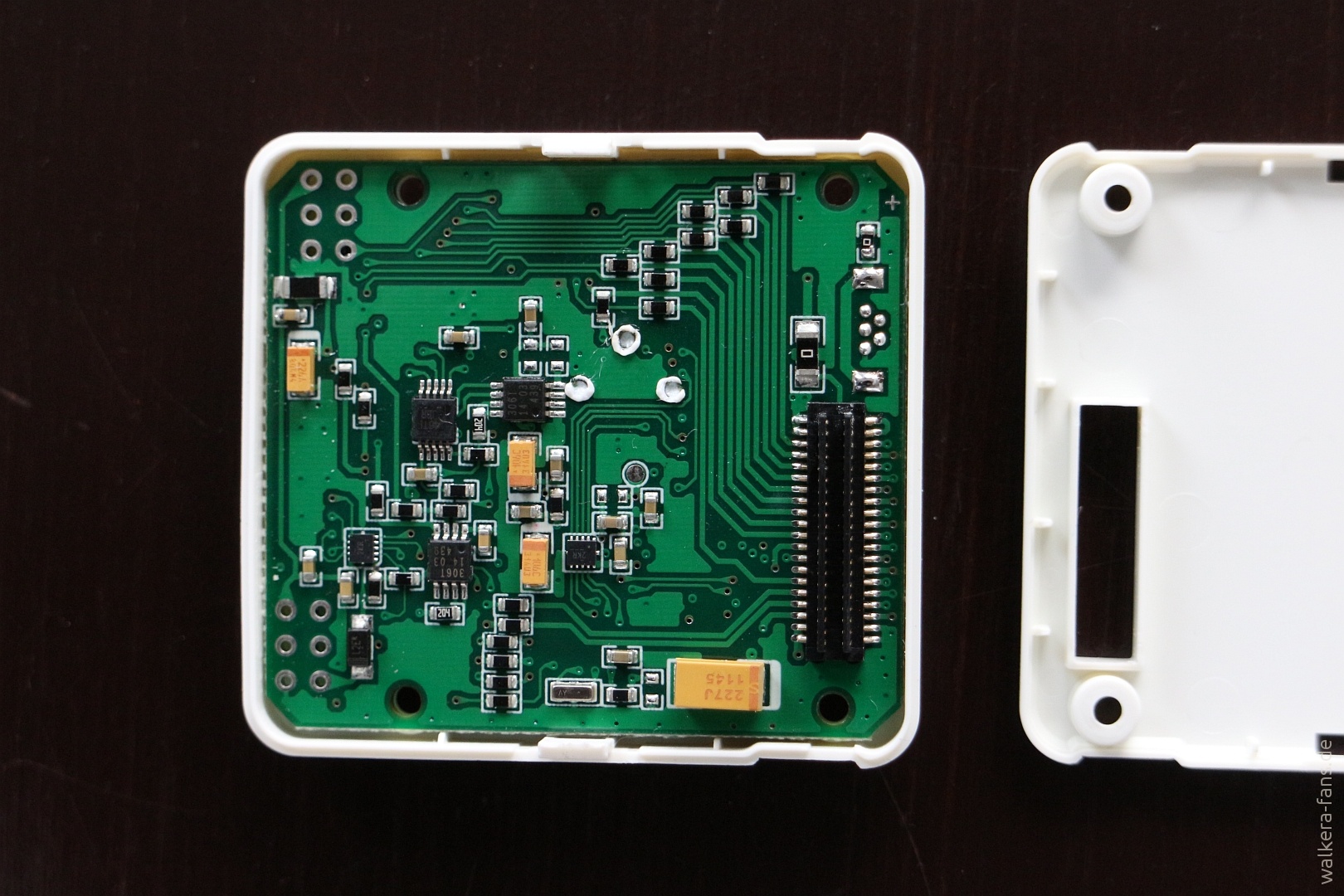
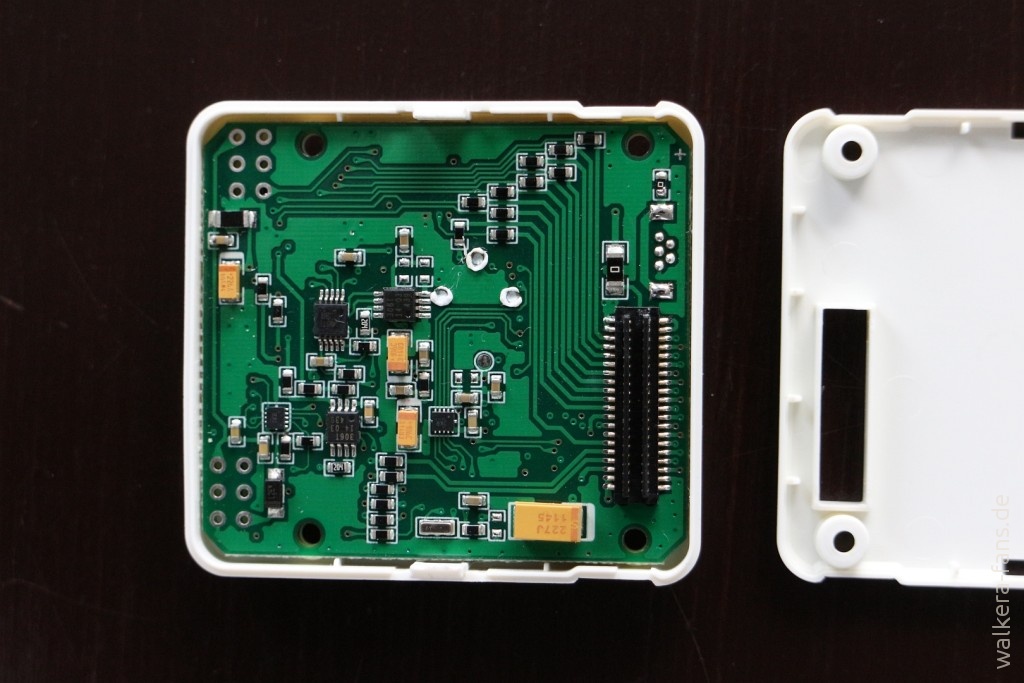



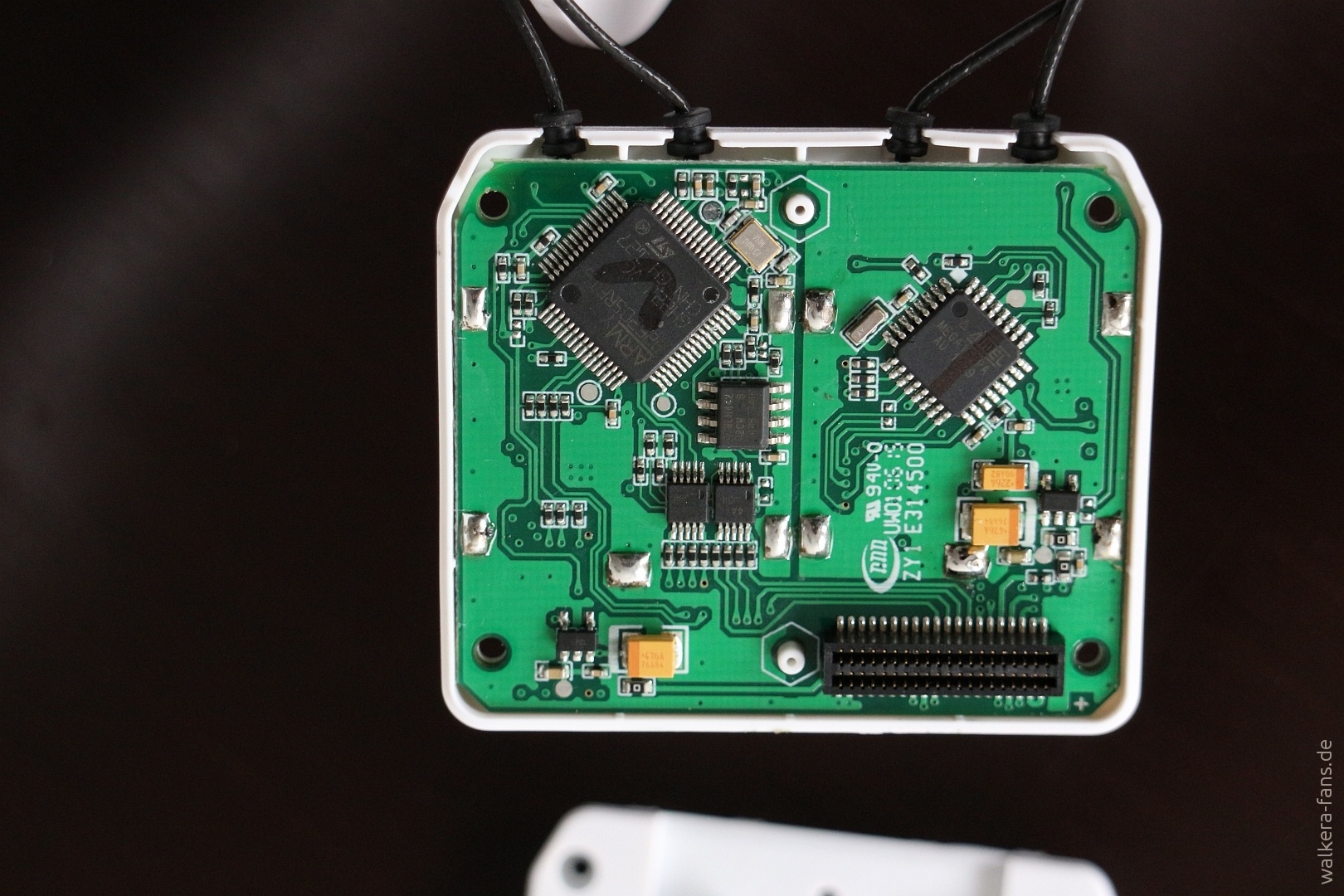
Zwei Funkmodule auf einer Platine. Hier rechts zu sehen ist die Devo Funkeinheit mit dem kleineren Atmega Prozessor, links – die GCS Einheit mit dem größeren ARM Prozessor:




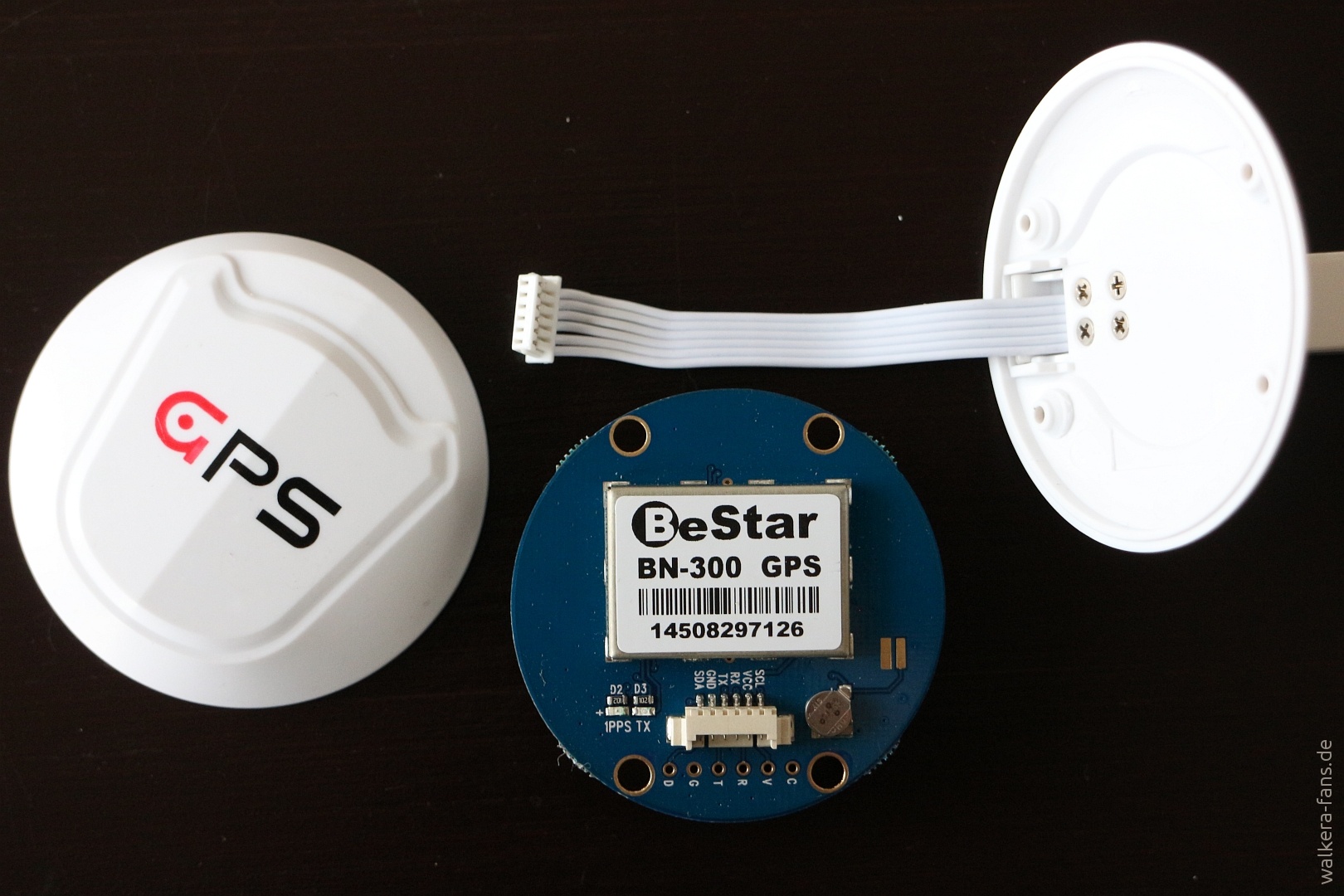
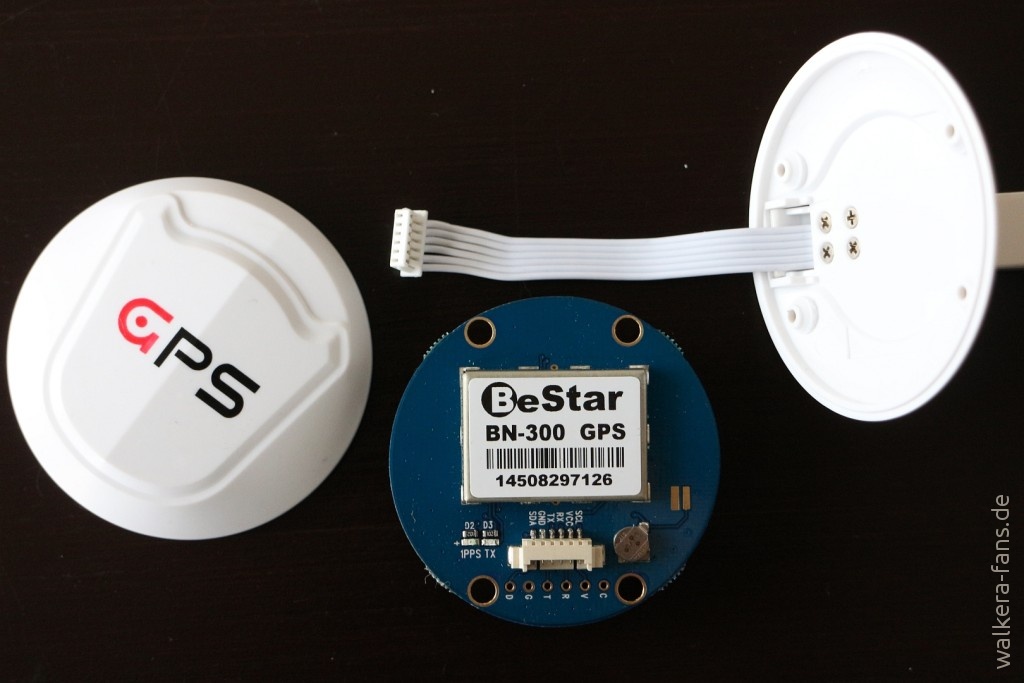
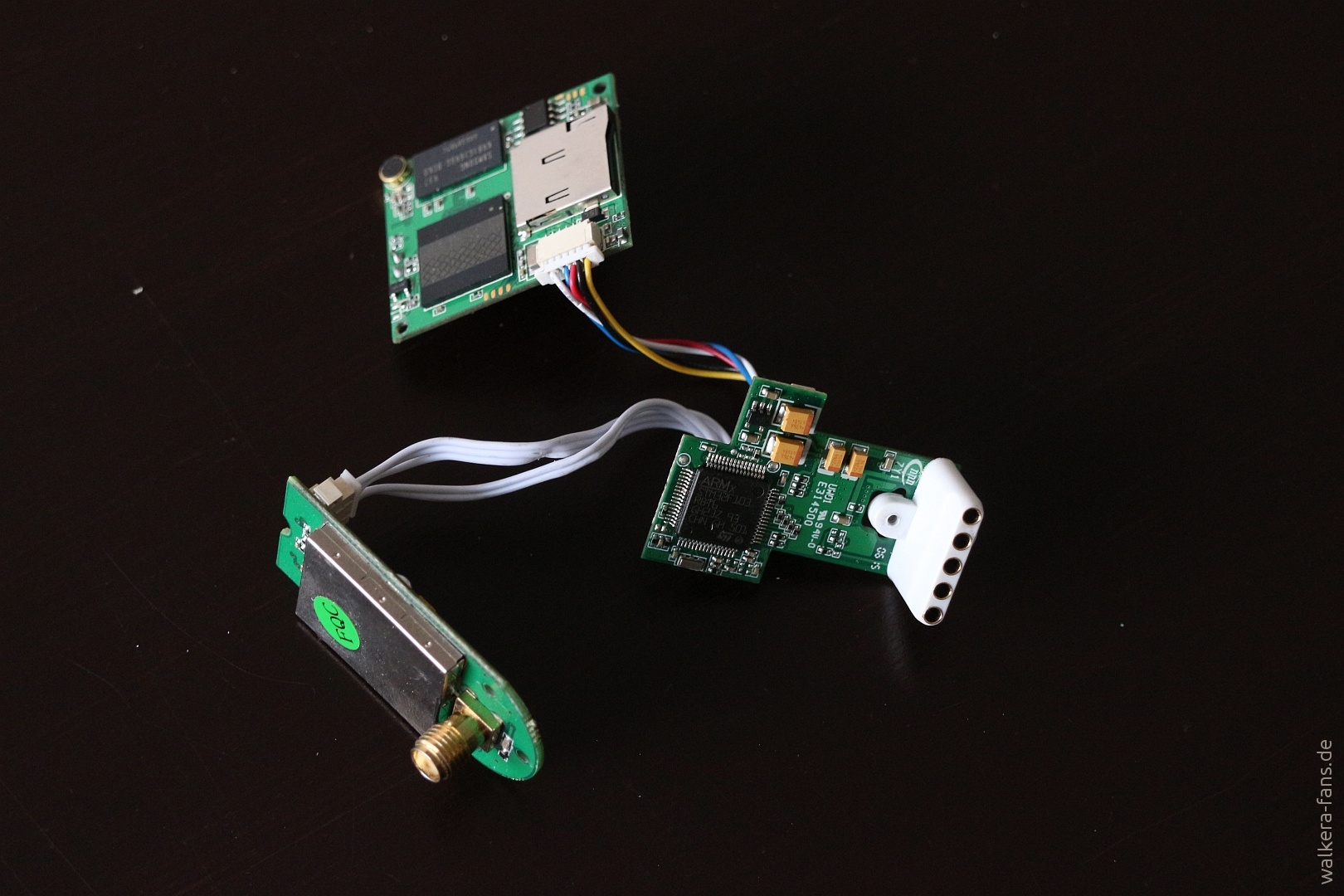
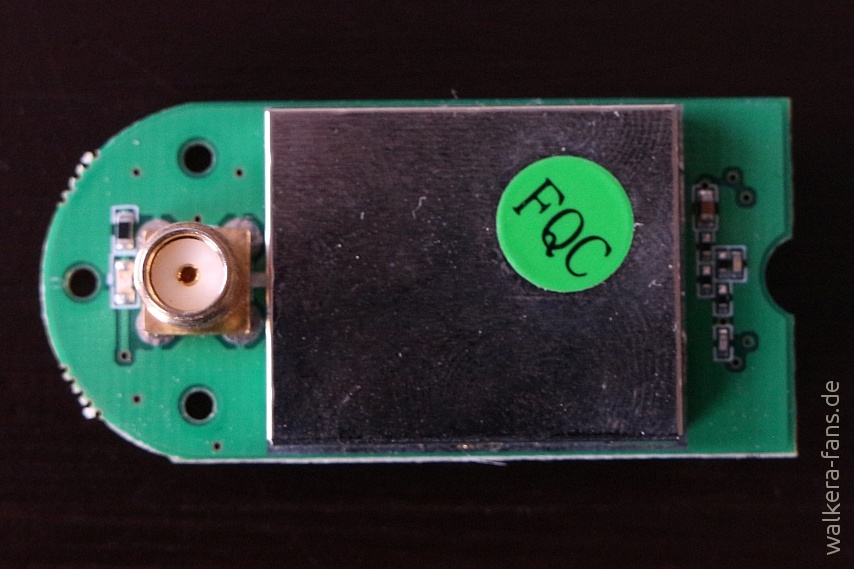
GPS Empfänger mit Kompass


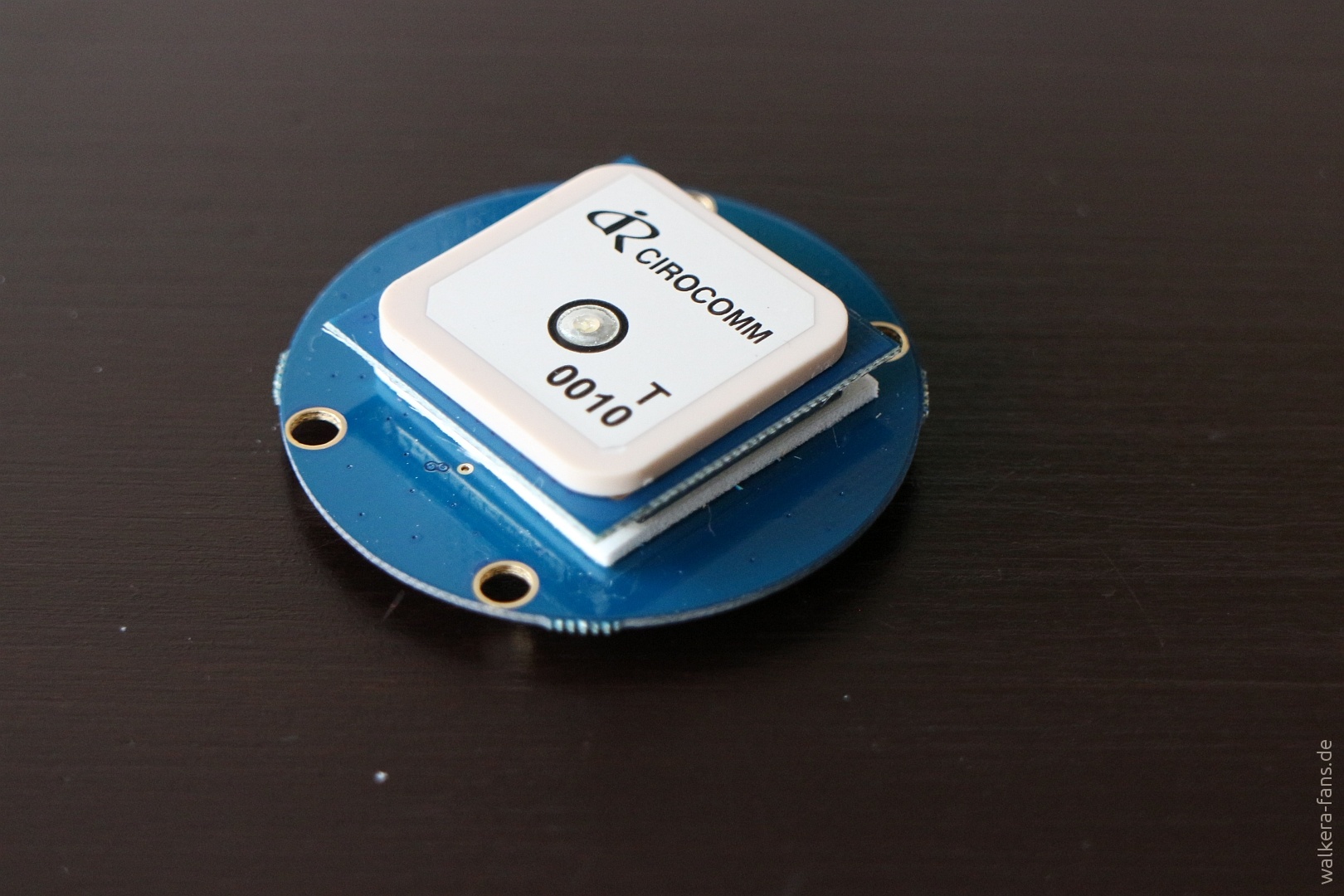
Circomm Antenne:


BN-300 GPS Modul:
Electronic Compass HMC5883L + UBLOX NEO-M8N
- TTL electrical level output, 9600 baud rate, 1HZ output, standard NMEA-0183 agreement output, with compass ICHMC5883L
- Can customize baud rate: 4800, 9600, 38400, 19200, 115200
- Output agreement to choose: NMEA-0183 or UBX
- Customize output frequency: 1HZ-10HZ
- Size: 45*6MM
Specification:
- Power supply: DC voltage: 2.8V-6V, typical: 3.3V or 5.0V
- Consumption: capture : 50mA @5V
- Receiving format: GPS , GLONASS, Galileo, BeiDou, QZSS and SBAS
- Receiving channel: 72 searching channel
- Receiving sensitivity: cold start: ‑167dBm, capture: ‑148dBm
- Positionig time: cold start: 26S warm start: 25S hot start: 3S
- Level positioning precision: 2m at open wild
- Output frequency: 1HZ-10HZ, default 1HZ
- 1PPS precision: <1s, pulse width: 100ms
- Acceleration precision: 0.1m/s
- Max height: 18000m
- Max speed: 515m/s
- Max acceleration: 4G
- UART interface: UART port: TXDA and RXDA
- Support Rate: 4800bps to 115200bps, default 9600bps
- UART is used for NMEA output
- Weight: 10g
- Working temp: ‑40 — 85degree
- Storage temp: ‑40 — -85degree


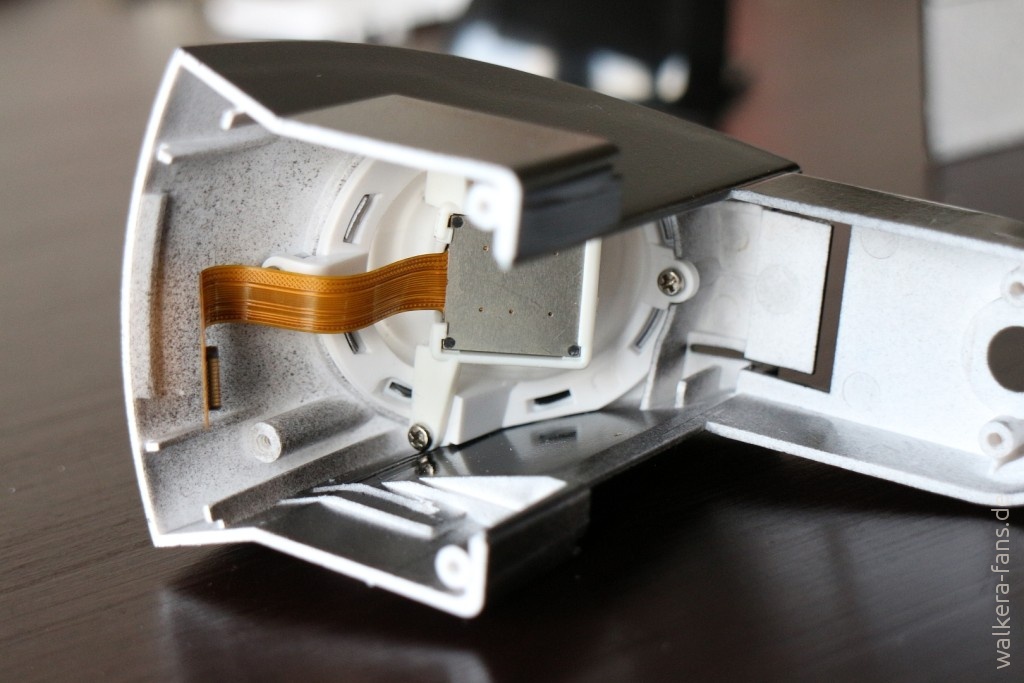
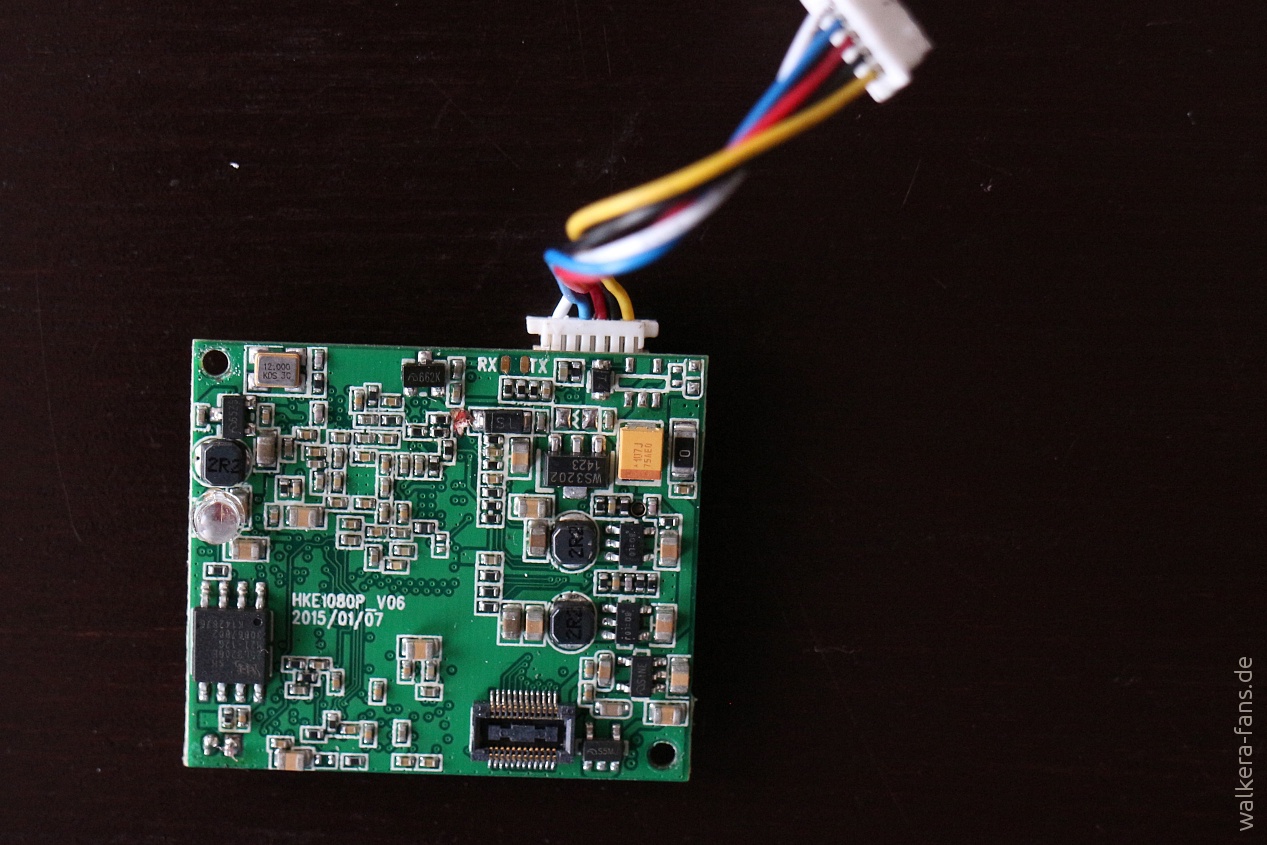
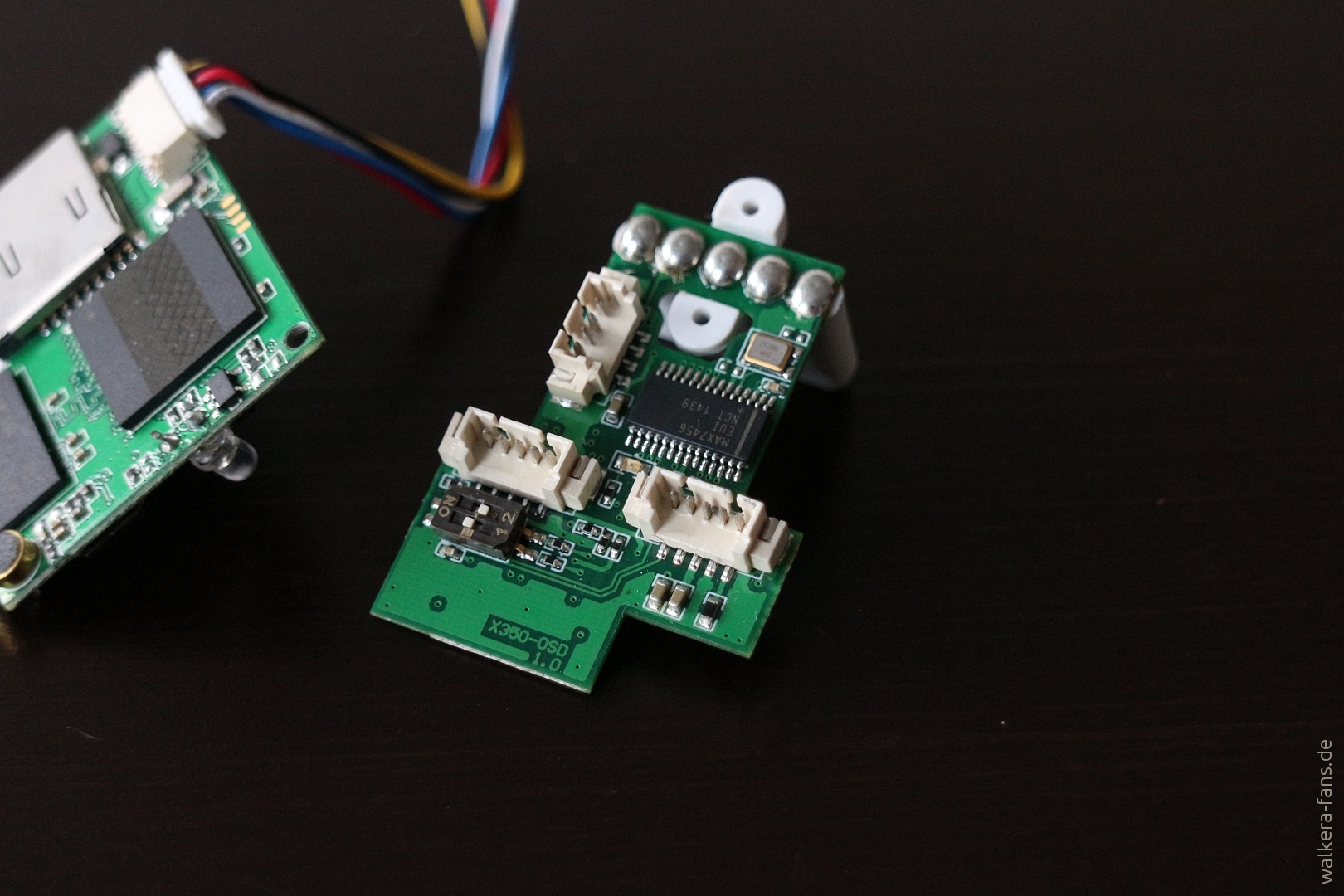
Kamera mit OSD Modul
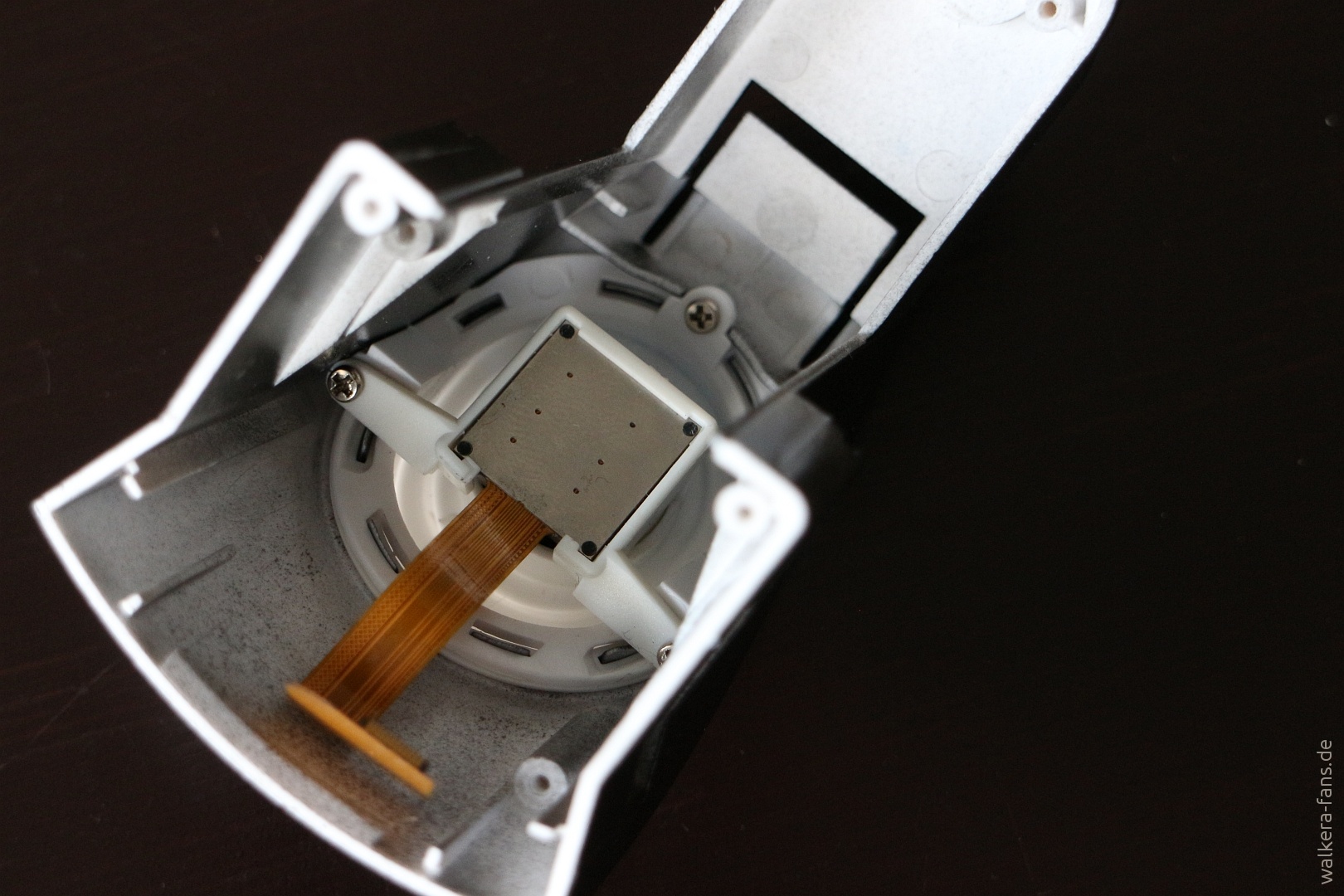
Objektiv mit einem sehr starken Weitwinkel:


Die Neigung der Kamera kann man nicht einstellen:
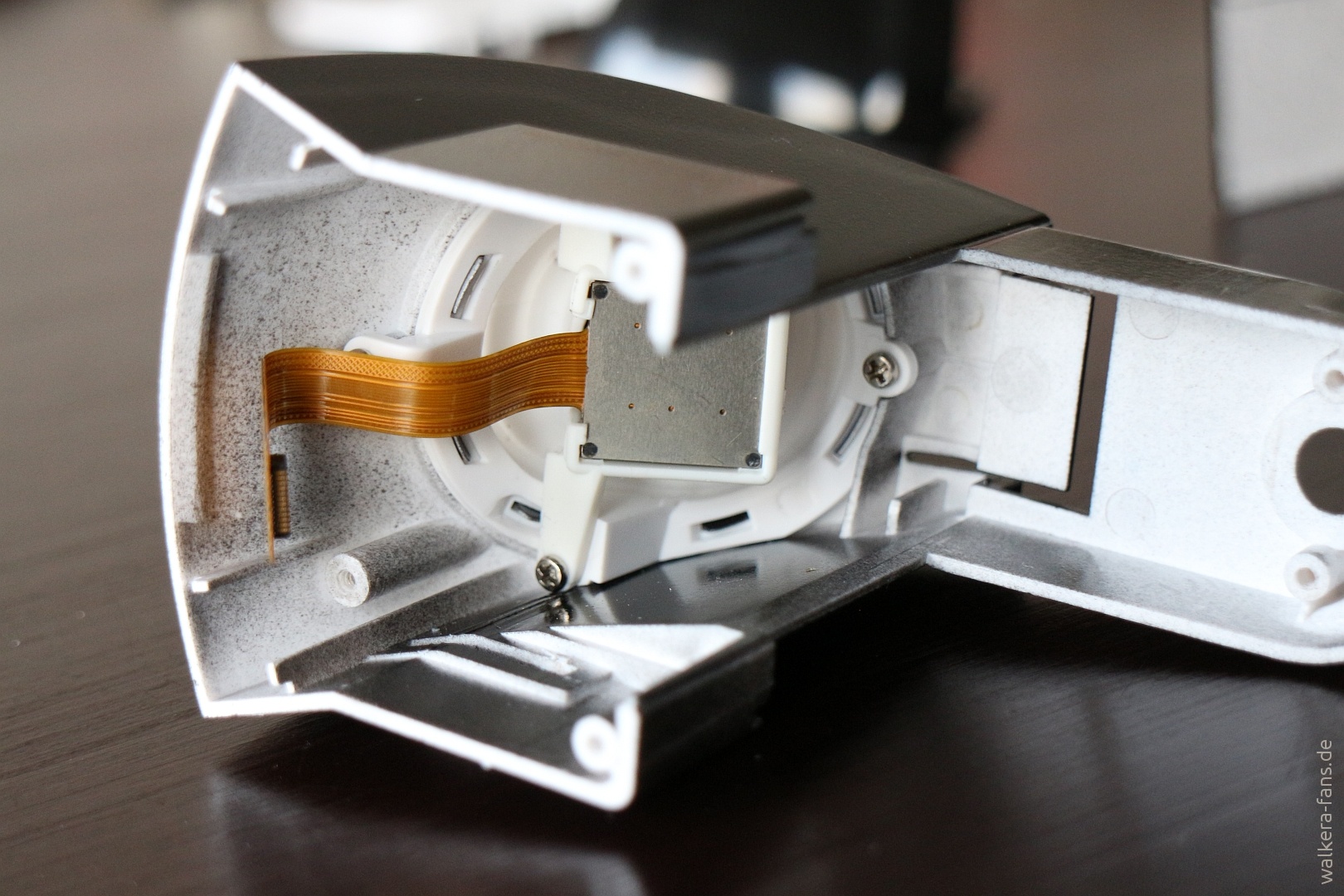

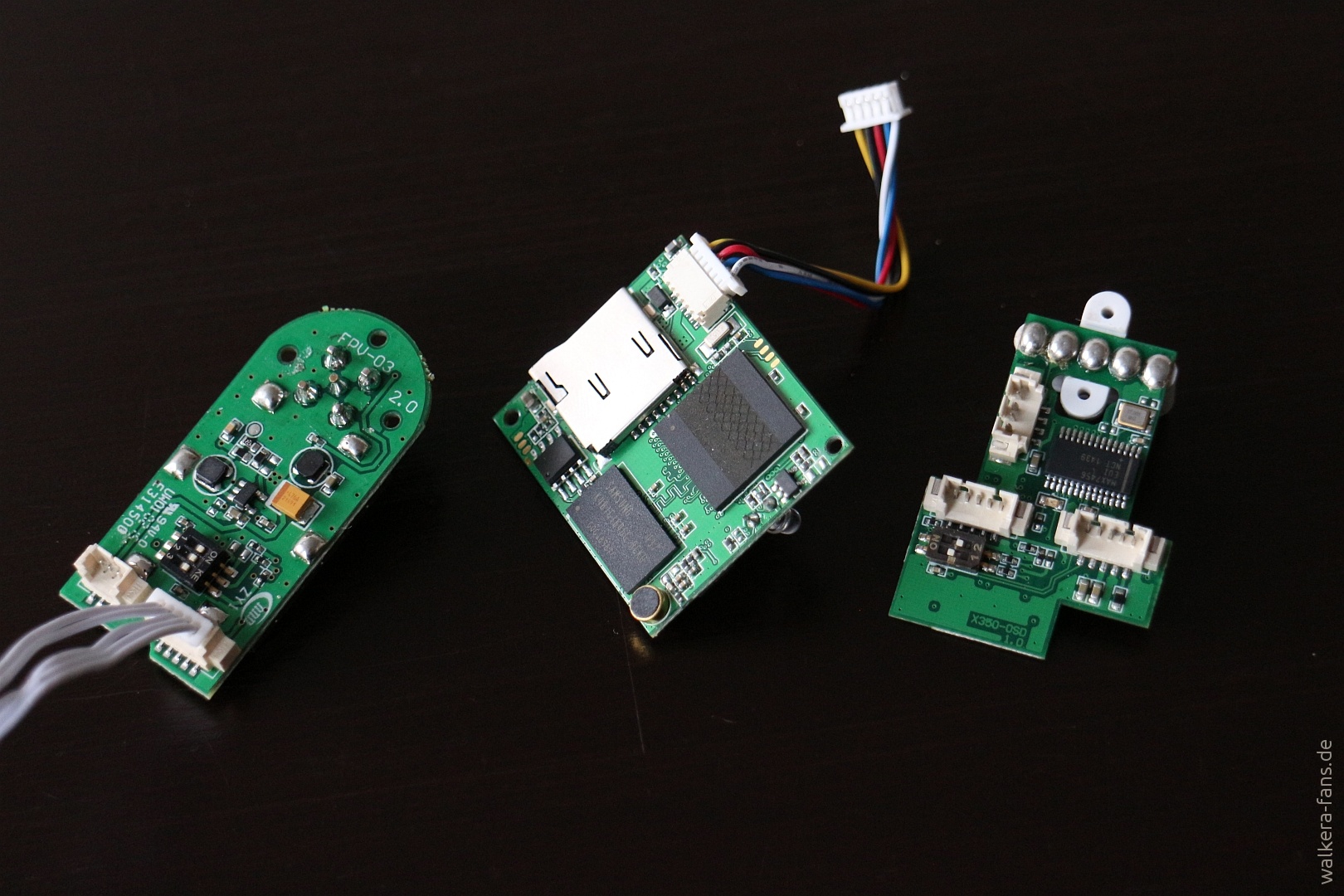
Die Kamera besteht neben dem Sensormodul aus drei Modulen:
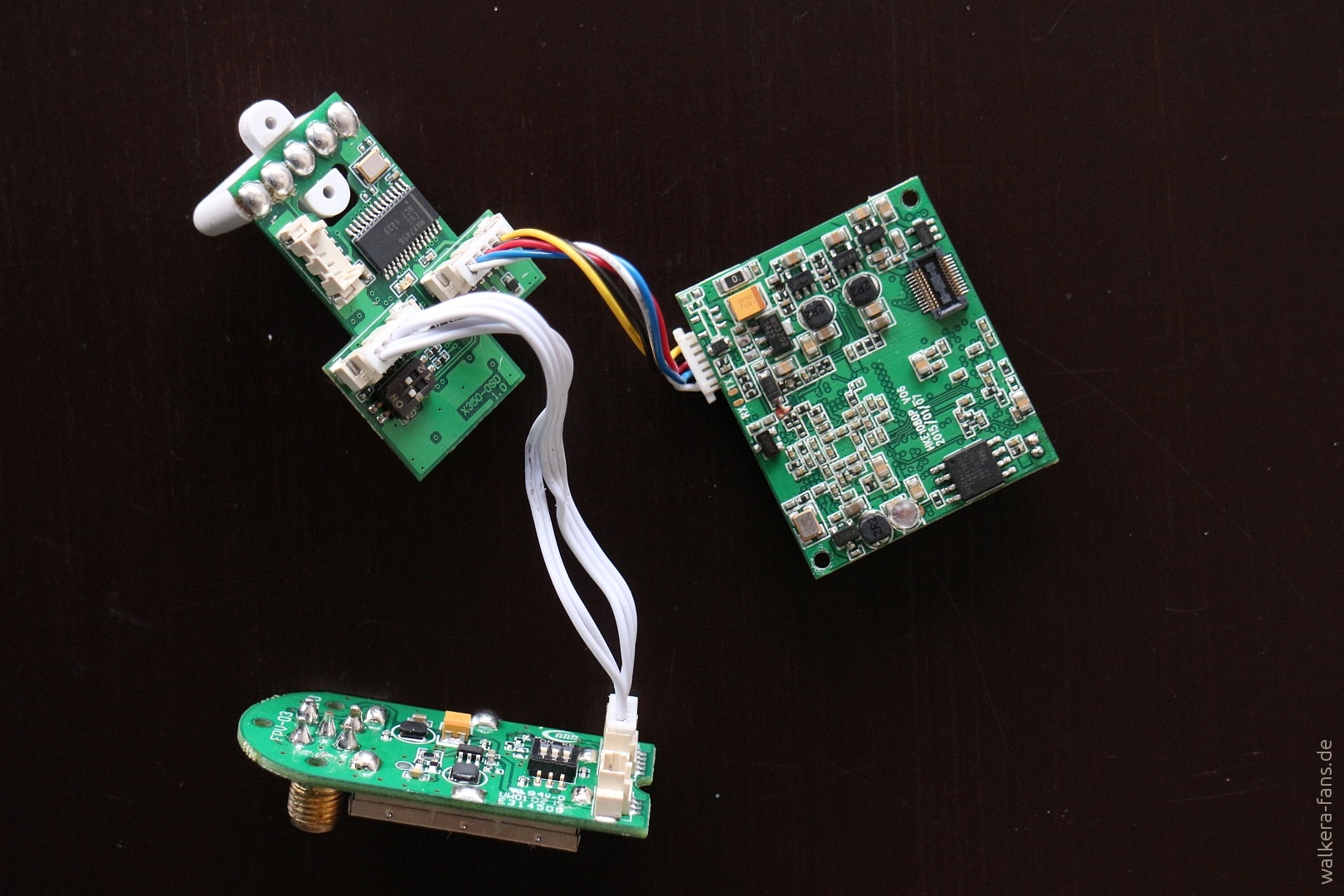
FPV Transmitter:
OSD Modul:
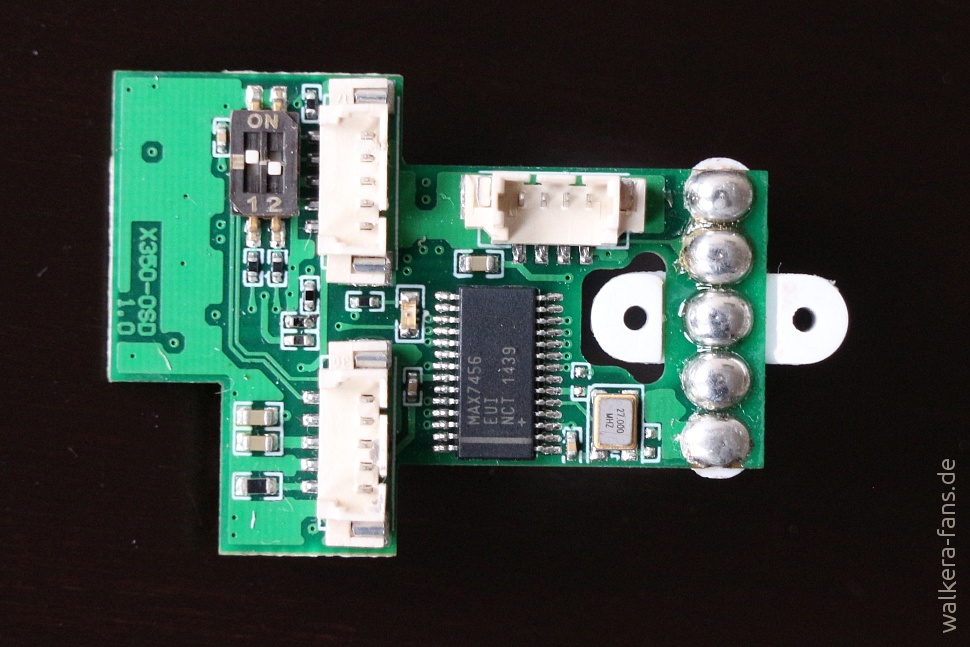
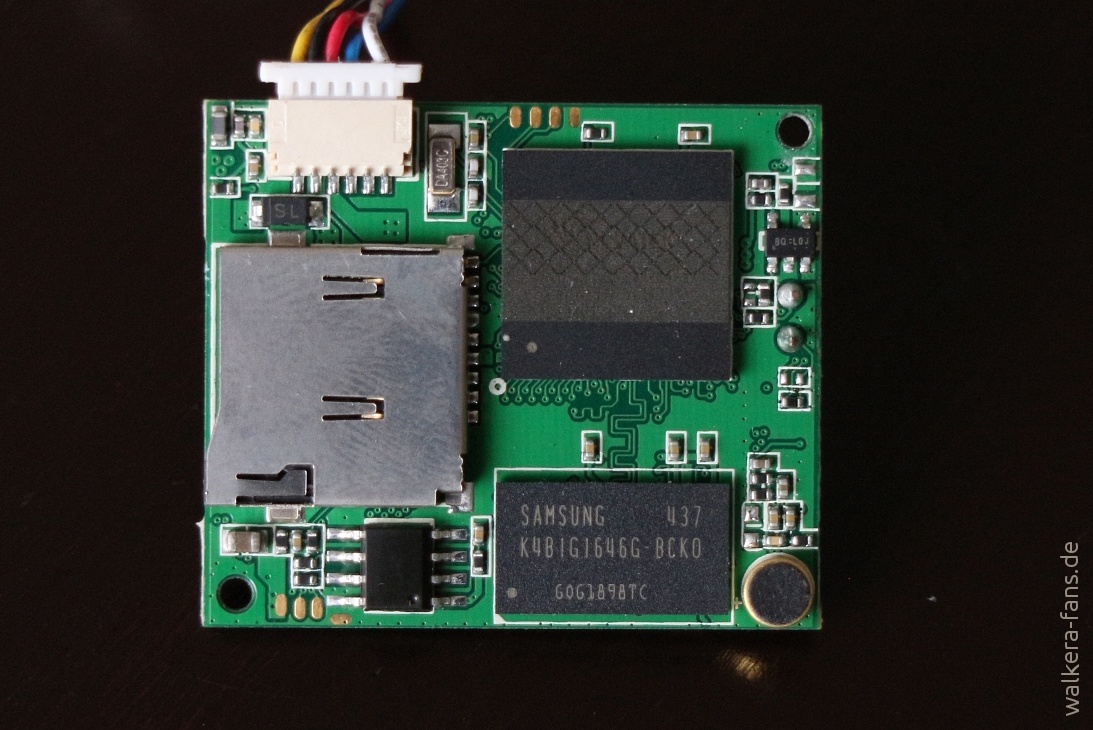
Kamera Prozessor:

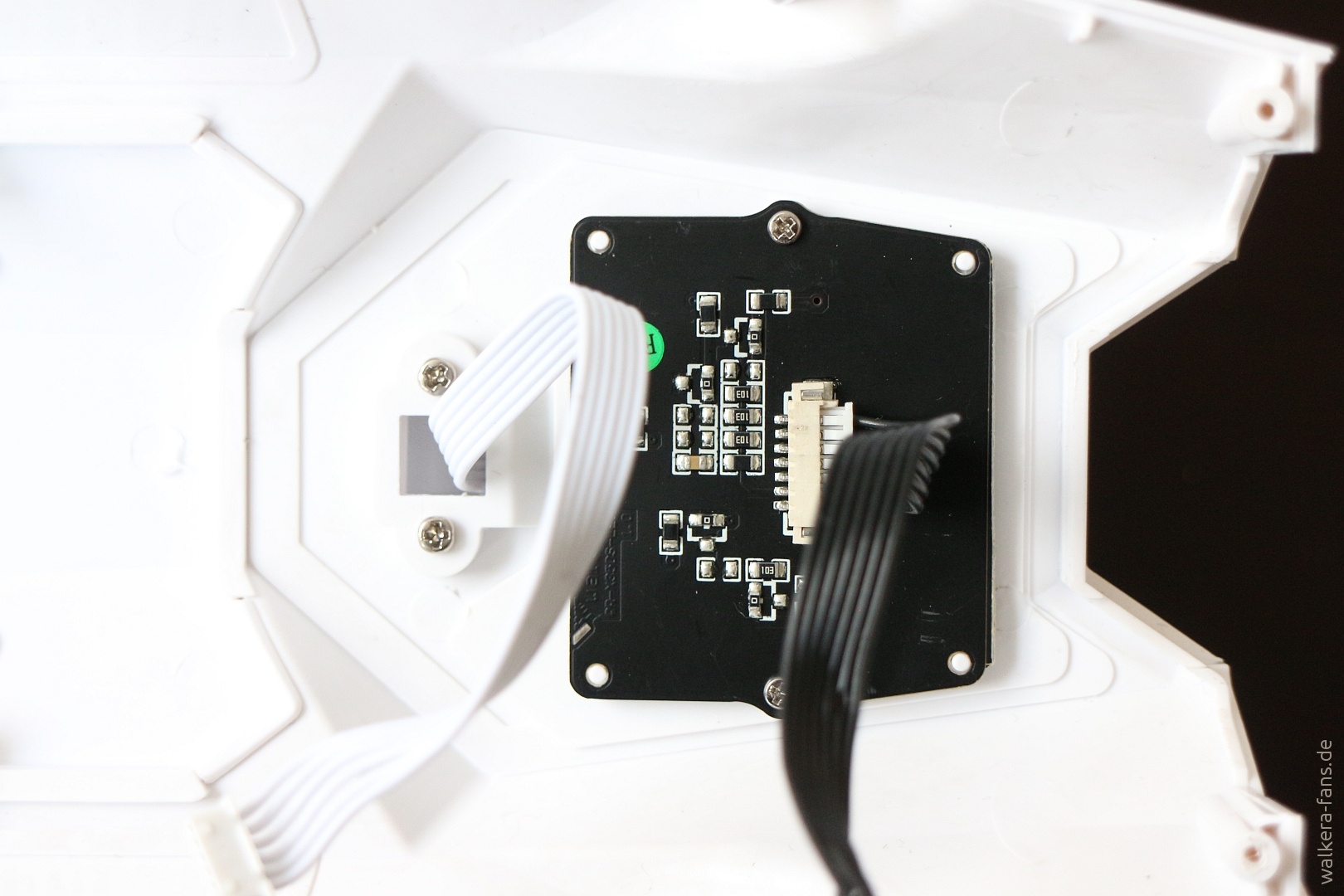
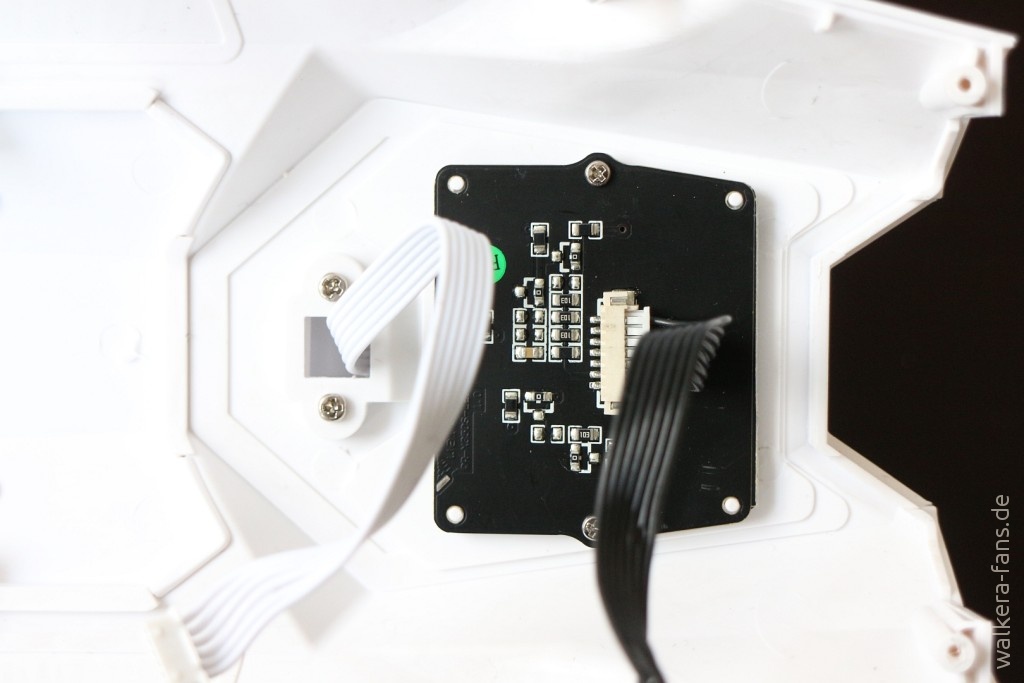
Gehäuse und LED Modul
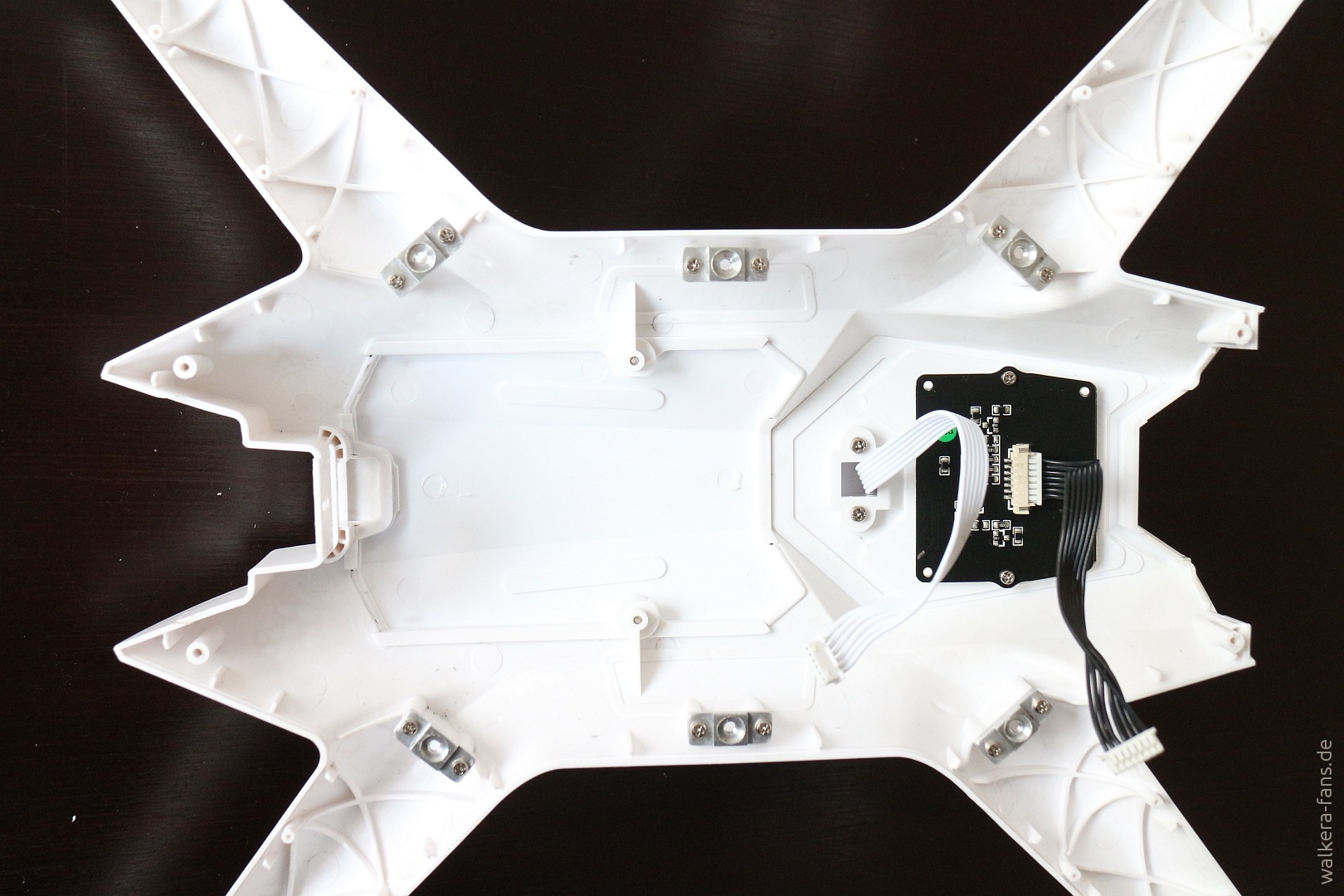



Theoretisch wäre eine X8 Variante möglich:


jepp, macht einen sehr aufgeräumten Eindruck, allerdings hinterlassen die starren Steckverbinder zwischen Hauptplatine und den Reglern in den Armen einen faden Nachgeschmack bei mir. Vibrationen in den Armen sind meiner Meinung nach unvermeidbar, will heissen, die Arme werden sich immer (wenn auch nur minimal, bewegen und verwinden. Diese Bewegungen treffen ungefedert auf die eher starren 3.5 mm Steckverbinder zwischen Hauptplatine und Regler. Das kann, so fürchte ich, auf die Dauer zu Brüchen in den Lötstellen der Steckverbinder führen, egal wie sauber das jetzt verlötet ist.
An dieser Stelle wäre eine Drahtverbindung flexibler und haltbarer, aber natürlich auch wohl aufwändiger in der Produktion.
Ein interessanter Punkt. Die Zeit wird zeigen, ob das zum Problem wird.
Na, da bist du ja mal wieder in den letzten Winkel vorgedrungen;-)
Sehr interessante Details! Voyager 350 lol
Aber immer noch keine Entkopplung der Platinen vom Chassis.
Hi,
das ist jetzt aber echt nur was für RTF-Flieger die gerne mit Devo fliegen, oder?
Kann man da noch eine normale Funke anschliessen?
Der Preis den man so sieht ist aber heftig. Dafür muß das dann aber wie ein DJI funktionieren.
Gruß,
Norbert
Ich glaube nicht, dass man einen anderen Empfänger so einfach anschließen kann wie bei den anderen Modellen. Hier ist eh alles auf kompaktes Design getrimmt und es gäbe eh keinen Platz für einen anderen Empfänger.