Bei allen modernen Koptern von Walkera wird LVC über die Flugsteuerung geregelt und ist per Software konfigurierbar. Ich zeige euch, wie das geht.
Inhalt
Kopter verbinden
Wie üblich muss der Kopter mit dem APM Planner kommunizieren können. Denkt daran, den Kompass vor Magneten zu schützen!
- Kein Akku an den Kopter,
- per USB verbinden,
- Sender (Devo) binden,
- APM Planner starten,
- Baud-Rate auf 57600 setzen
- und auf „CONNECT” klicken.
LVC einstellen
Das Menü für LVC findet ihr im Initial Setup unter Mandatory Setup. Es ist der Punkt Failsafe dort.
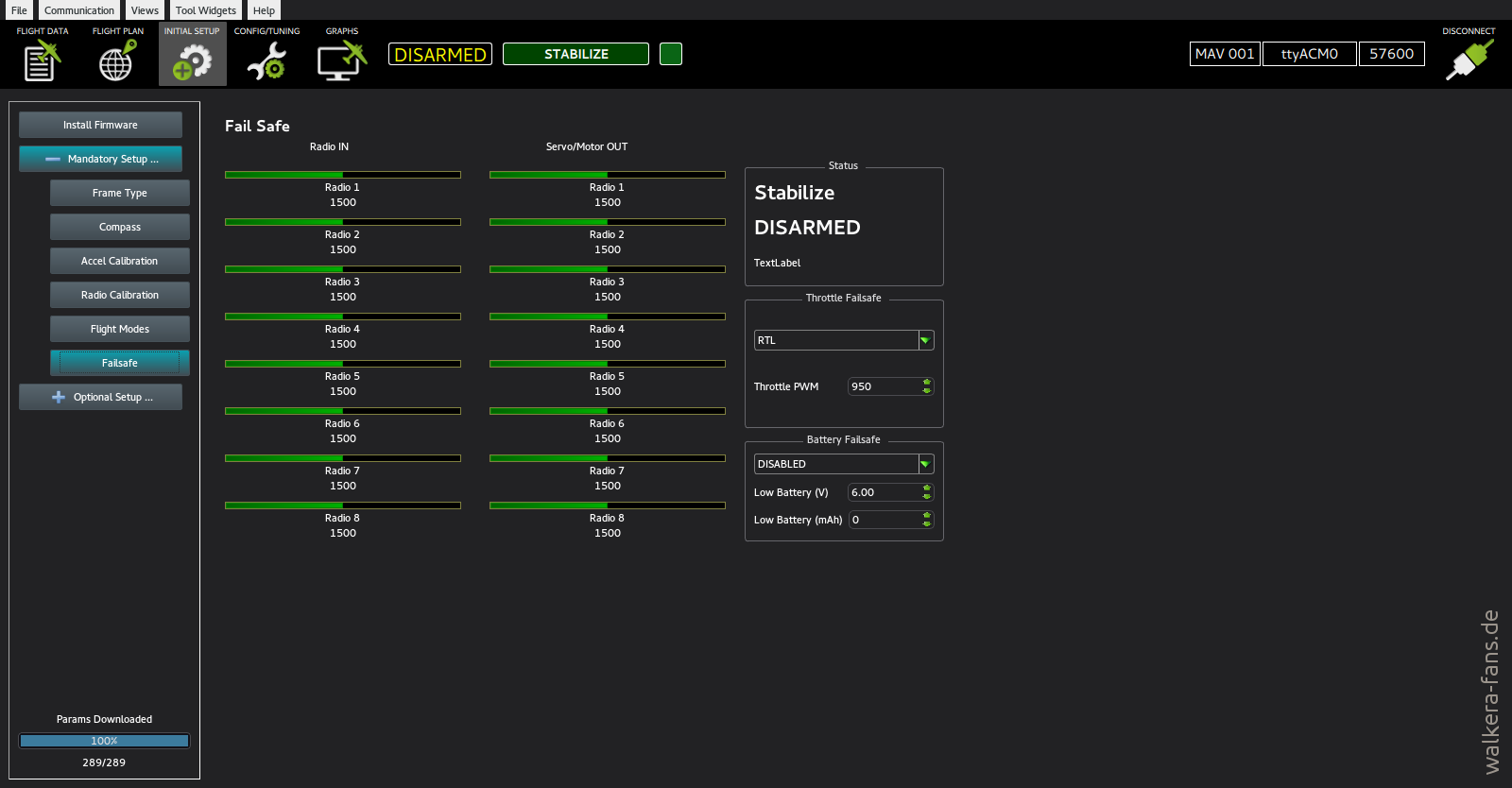
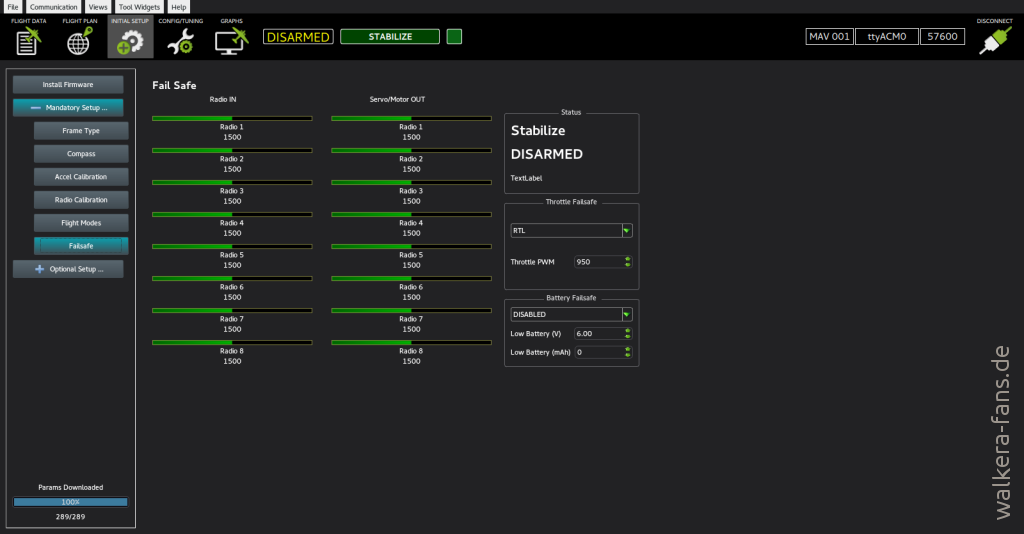
Hierbei muss man wissen, dass sich die Walkera Flugsteuerungen etwas von den originalen ArduCoptern unterscheiden. Deswegen funktioniert die Auswahl des Verhaltens bei niedriger Akkuspannung nicht vollständig.
Es bringt leider nichts, auszuwählen, ob der Kopter Landen oder zum Startpunkt fliegen soll. Er wird in allen Fällen bei der eingestellten Spannung an seiner aktuellen Position langsam sinken.
Diese Spannung drastisch zu reduzieren funktioniert aber zuverlässig. Also setzt den Wert einfach auf Minimum und schon wird LVC nie wieder aktiv.
Etwas vernünftiger ist allerdings, LVC als Notfallprogramm beizubehalten. 3V Zellspannung sollten nie unterschritten werden, also setzt den Wert am besten auf 3,1V pro Zelle in Reihe.
Beim X350 Pro wären das 9,3V, denn er hat einen 3S-Akku (18,6V bei Scout, Tali und X800; 24,8V bei Voyager und X350 Premium).
Dieses Menü hat keinen Speicherbutton. Die Änderung wird direkt an den Kopter übertragen.
Überprüft diese Einstellung nach jedem Firmware-Update! Beim Upgrade des X350 Pro von Version 1.5 zu 1.7 hat sich diese Einstellung bei mir zurückgesetzt.
LiPo Warner / Telemetrie
Da die Kopter bei niedrigen Werten in der Lage sind, ihre Akkus durch Tiefentladung zu beschädigen, seid ihr selbst dafür verantwortlich, die Spannung zu überwachen.
Tiefer als 3,4V sollte keine Zelle im Flug entladen werden.
Ich empfehle akustische Warner, da diese unabhängig von der Fluglage wahrgenommen werden können. Wenn euer Kopter bereits Telemetrie hat und z.B. über das virbrieren der Devo warnt, ist das natürlich auch bestens. Setzt dort die Schwelle ebenfalls auf mindestens 3,4V pro Zelle.
Hallo nVentor,
Bin nun etwas verwirrt: In dem unten verlinkten 2014er Post von Gektor wird empfohlen, für den 350 Pro einfach die Low Voltage Control über die Failsafe Funktion (Parameter FS_BAT_ENABLE in APM) komplett auszuschalten. Offenbar gibt es beim 350 Pro immer wieder Crashes, weil beim Failsafe Landeversuch der Barometer dem Devo‑m Flight Controller die Davenport zumüllt. Nun lese ich hier, dass man den Failsafe Parameter doch angeschaltet lassen und die Überwachungsspannung dann sehr niedrig einstellen soll.
besteht hier nicht die Gefahr, dass es bei niedrigen Spannungen (real oder auch nur fehlinterpretierte kurze Spikes?) zu Abstürzen kommen kann?