Das neue iPhone 6+ lässt sich mit zwei gesunden Händen verbiegen und den Leuten fallen Talis aus dem Himmel. War früher alles besser?
Tali kostet in Etwa so viel wie das iPhone 6+. Und taugt, was die Verwindungssteifigkeit angeht, in Etwa genau so viel. Zumindest unser Tali.
Inhalt
Zweiter Tali Crash
Ihr habt ja gelesen, dass unser Tali genau einen Flug gehalten hat. Schon beim Zweitflug gab es einen Kabelbruch.
Nach dem ersten dürftigen Löten des Motorkabels wollte ich schnell die Firmware 1.2 testen. Da ist der Tali wieder gecrasht. Diesmal war es ein anderes Käbelchen im selben Arm.


Die Vibrationen an diesem einen Arm wurden verstärkt, weil beim ersten Crash (oder bei meinen Tests, hehe) die kleinen Stifte im Arm abgebrochen sind. Dann flext der Arm mehr und die Kabel können leichter abbrechen. Propeller habe ich natürlich auch nicht gewuchtet. Ist ja RTF und außerdem müsste ich mir erst eine Wuchtwaage für diese Nabenpropeller bauen.
Video-Link: https://www.youtube.com/watch?v=SsSROwh1XVg
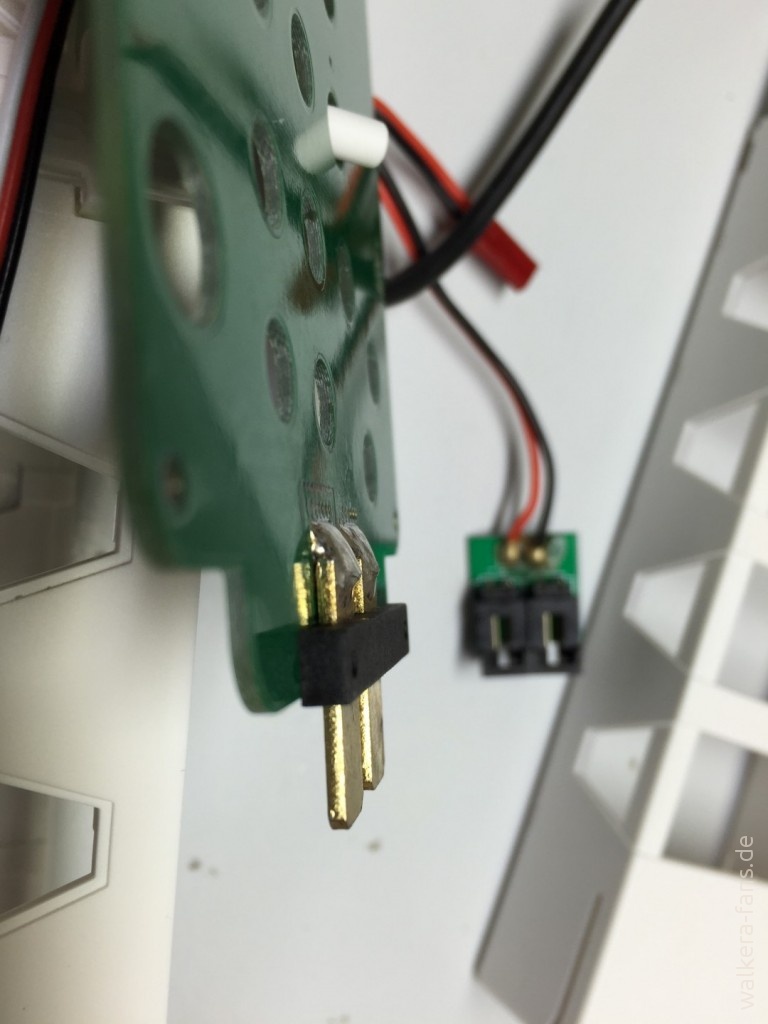
Und, was ist die Absturzursache? Ihr habt richtig geraten, wieder ein Kabelbruch. Aber nicht da, wo ich gelötet habe. Das ist diesmal ein Kabel daneben gewesen. Er ist mitten drin, am Kinck, gebrochen:
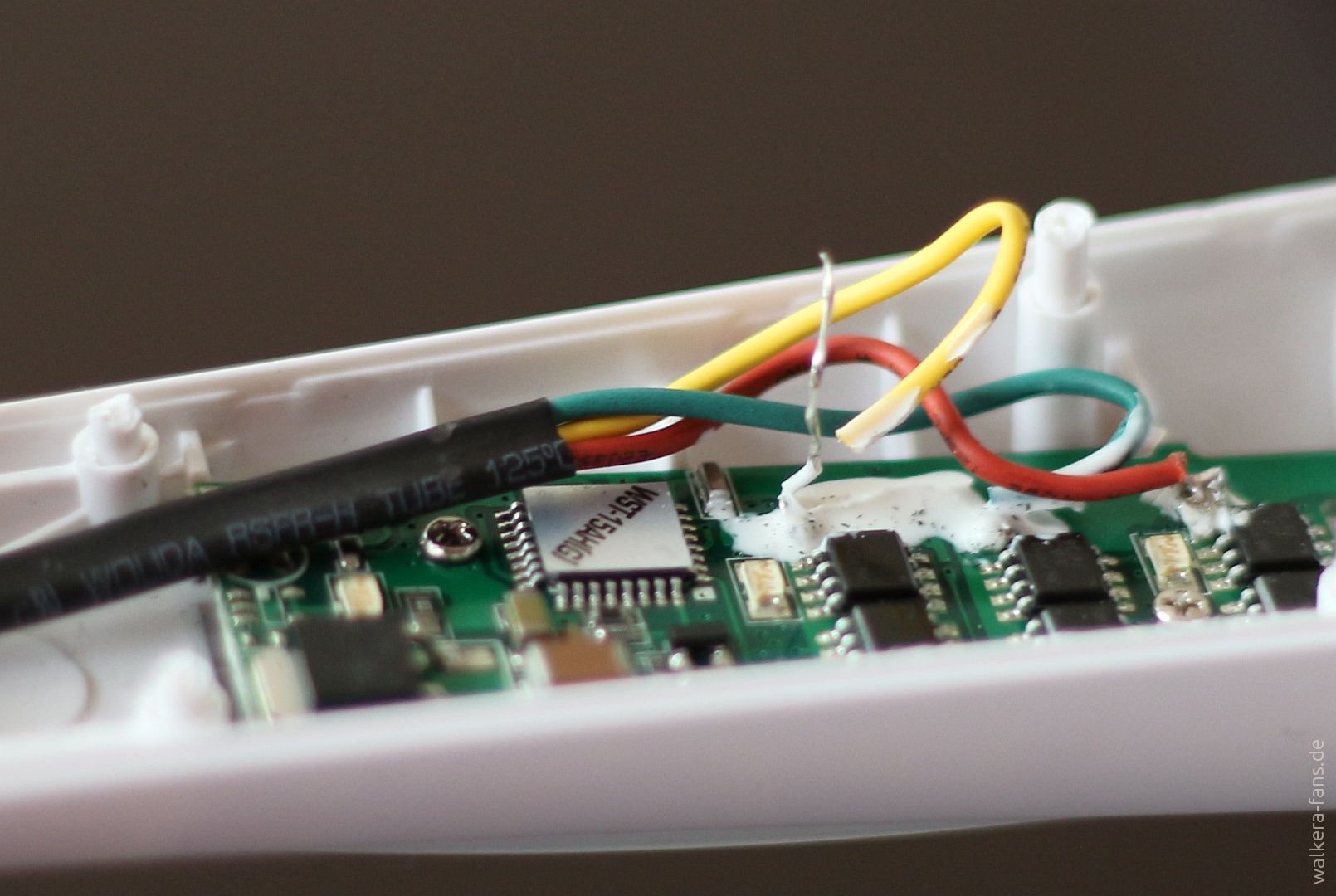
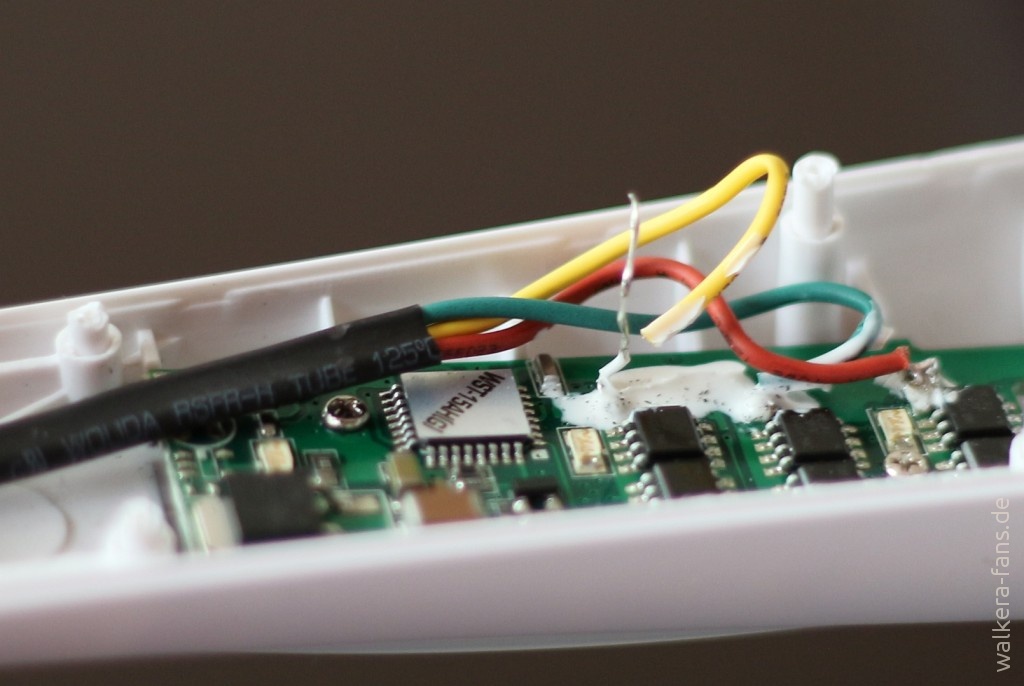
Die Arme mit gebrochenen Stiften (die Seifte sieht man oben auf dem Foto auch) flexen zu viel. Sie sind einfach zu lang, besonders die links und rechts, und verwinden sich aufgrund der Vibrationen, die beim Betrieb eines Motors ganz normal sind. Das Teil zerlegt sich quasi selbst, so Leid es mir tut. Die Vibrationen wirken sich auf die Kabel und Lötstellen negativ aus, was zu crashes führt.
Gut, wenn die kleinen Stifte alle in Ordnung sind und alles perfekt gewuchtet ist, dürfte es noch gehen. So ein großer Hexakopter braucht aber vielleicht doch ein steiferes Gehäuse. Es ist nicht gut, dass die Verwindungssteifigkeit nur aufgrund von vier kleinen Stiften gegeben ist.
Gehäuse reparieren
Pins im linken Arm, worauf er fiel, sind durch den Crash abgebrochen.
Das führt dazu, dass der Arm nicht mehr ausreichend verwindungssteif ist. Die Motoren sind sehr mächtig und entwickeln bei höheren Drehzahlen Vibrationen, was relativ normal ist. Ein Arm ohne Pins hält diesen Vibrationen nicht richtig stand.
Diese Pins haben ein Loch in der Mitte. In dieses Loch kann man als Hilfe für die Ausrichtung beim Kleben eine Büroklammer stecken. Dann mit Sekundenkleber verkleben.
Video-Link: https://www.youtube.com/watch?v=RvLpkhpuqgA
Das hält leider nur dürftig. Was einmal gebrochen ist, ist gebrochen.


Insgesamt müsste man das Gehäuse, insbesondere aber den rechten und den linken Arm, ein Wenig verstärken. Nur wie? Einfach außen rum verkleben? Innen mit Glasfaser aushärten?
Ich fragte mal Matt Kim nach seiner Meinung zum Gehäuse. Er meinte „Solange du kein Bisschen crashst, ist das fest”. Ok, vielleicht bin ich zu sehr von der X350 Serie verwöhnt, dem kleinere Crashes nichts ausgemacht haben.
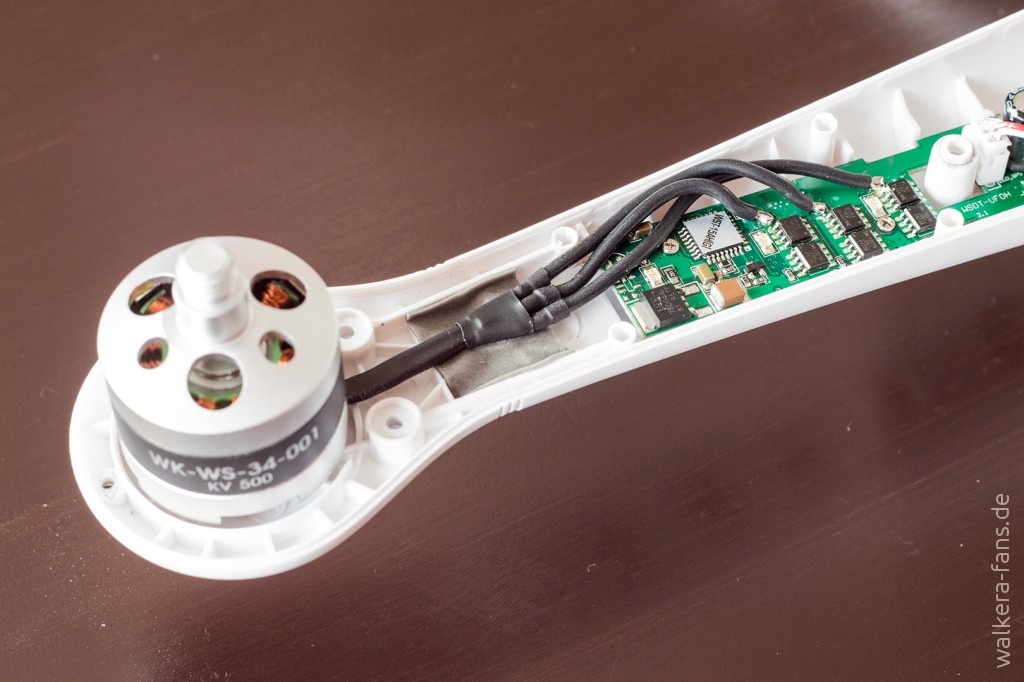
Kabel tauschen
Wie ihr wisst, geht das mit den Kabeln so nicht, wie Walkera es beim Tali gemacht hat. Ich habe mich an die Arbeit gemacht, die Kabel zu tauschen. Das ist eine blöde Arbeit, weil alles daran blöd ist.
Video-Link: https://www.youtube.com/watch?v=aXYiUdDv1AI
Merkt euch, welche Farben wohin kommen. Sonst dreht euch irgendein Motor in die falsche Richtung.
Silikon entfernen
Zunächst muss man das Silikon entfernen. Sonst kann man nicht vernünftig löten. Ich habe Eisspray aus der Apotheke angeweidet.
Eisspray kann helfen das Silikon zu entfernen, indem es das Silikon spröde werden lässt. In diesem Zustand lässt es sich einfacher entfernen.
In Verbinfung mit dem Lötkolben kann man dann den Regler frei machen. Vermutlich kann man ihn auch nur mit dem heißen Lötkolben irgendwie von den Lötstellen runterkratzen.
Drähte mit Silikonlitzen verlöten
Dann habe ich die Kabel ca. 3 cm vom Ansatz abgemacht und habe sie abisoliert. Hier kommt die nächste Herausforderung: Drähte vom Lack befreien.
Dieser Lack würde sonst verhindern, dass man die Kabel löten kann. Er geht mit Hitze schon weg, aber das Ganze wird vom Feuerzeug ganz schwarz, was man dann auch wieder beseitigen muss. Mit dem Lötkolben lässt sich der Lack auch wegbrennen. Am Besten auf eine Flache Oberfläche legen und mit dem heißen Kolben ankratzen. Anstrengend ist es, zumal in jedem Kabel zwei Drähtchen sind.
Dann jedes Drahtpaar verzinnen und mit dem guten Silikonkabel (ich habe 18 AWG genommen) verlöten.
Längen abmessen, installieren, mit Regler verlöten, fertig. Dauert aber lange und ist anstrengend.


Läuft!
Motoren und Propeller dynamisch wuchten
Eigentlich muss man auch alles dynamisch wuchten.
Dynamisch bedeutet, dass man den Motor laufen lässt und versucht, mit einem Kabelbinder die Seite des Motors zu finden, die man beschweren muss, damit er weniger vibriert. Dann klebt man an die stelle z.B. Tesafilm.
Wenn das fertig ist, kann man die Propeller montieren und schauen, ob die zu Vibrationen führen. Eigentlich müsste man die Propeller ordentlich mit einer Wuchtwaage wuchten, aber für diesen Durchmesser muss ich erst einmal einen passenden Stab finden, den ich mit einem passenden Gewinde versehen kann.
Man kann die Propeller aber auch dynamisch wuchten, indem man sie beim laufenden Motor (Vorsicht!) auf Vibrationen überprüft und versucht, auf eine Seite etwas Tesa zu kleben und dann zu schauen, ob die Vibrationen weniger werden. Zwischendurch den Motor natürlich abstellen, ist klar 😉
Und das bei 6 Motoren.
Eigentlich habe ich mich für RTF Fliegerei entschieden, weil nach einigen selbst gebauten Koptern die Lust am Basteln geringer war, als die Lust am Fliegen. Aber gut.
Beim X350 waren damals sogar gewuchtete Propeller dabei…
Weitere Fehlerquellen von anderen Nutzern
Viele Nutzer berichteten uns über die Abstürze ihrer Tali H500 Hexakopter.
Ich möchte hier Igor besonders danken, da er sich bei der Sammlung der Schwachstellen besonders engagiert hat. Sein Tali ist leider auch abgestürzt. Der Strom war einfach aus.
Akku und Payload
Einige Nutzer berichten über Akkus mit kaputten Zellen. Das kann ich nicht ganz glauben, obwohl es auch schon sein kann. Ich vermute, dass manche falsch messen. Der Balancer Anschluss, an dem man die Spannung einzelner Zellen überprüfen kann wird erst vollständig aktiv, wenn der Akku eingeschaltet ist. Nur in diesem Zustand kann man auch die Spannung am Balancer Anschluss messen.
Manche Abstürze sind wiederum vermutlich auf die geringe Leistungsfähigkeit des Akkus zurück zu führen.
Die C‑Rate (Entladerate) des Akkus beträgt 10 C. Das heißt, dass der Akku ca. 50 A Strom liefern kann, bis die Spannung einbricht. Das sind immer hin 1100 W, wobei jeder Heli-Pilot über 10 C nur müde lächelt. Dort wird mit 30 C und mehr geflogen.
Je leerer der Akku allerdings wird, desto weniger kann man Strom daraus ziehen, und desto schneller kann die Spannung einbrechen. Wenn eine Zelle kaputt oder nicht ganz so gut ist, wird es noch schlimmer. Vielleicht ist das, in Verbingung mit ungünstigen Flugmanövern wie das Bringen den Kopters in den Vortexzustand, auch der Grund für die Abstürze der Talis einiger Nutzer.
Mit mehr als ca. 300 – 400 g soll der Tali aus meiner Sicht nicht belastet werden. Mit 600 g hebt er fast nicht mehr vom Boden ab. Also ist die Traglast am Ende doch eher gering.
Verlasst euch übrigens auch nicht zu sehr auf die Akkustandsanzeige. In der Luft zeigt sie unter Last natürlich weit weniger Striche an als ohne Belastung. Ein Akku mit nur einem fehlenden LED „Strich” kann schon fast leer sein.
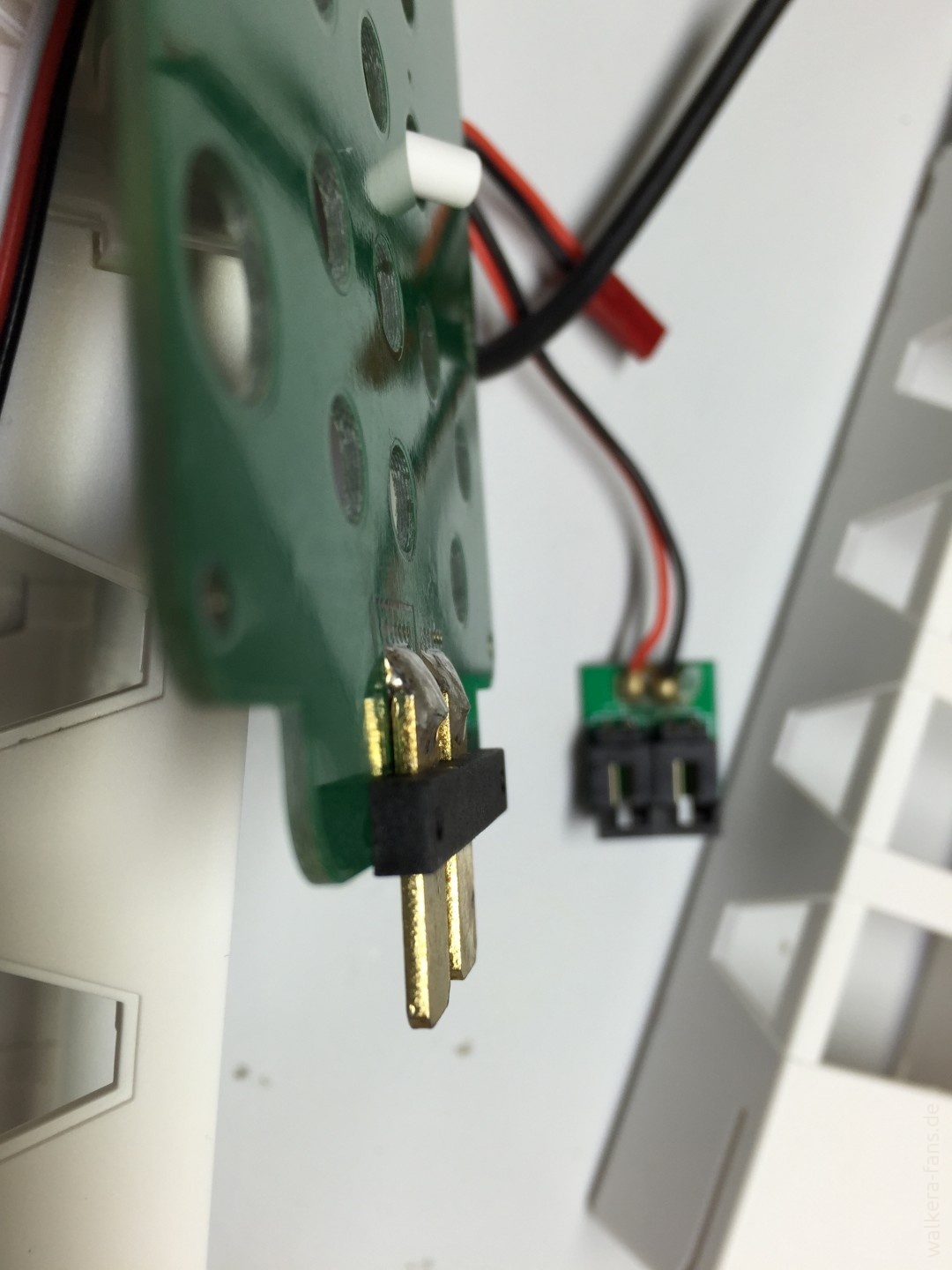
Akkuverbindung
Viel plausibler ist die Theorie der schlechten Akku-Kontake.
Hansi hat in seinem Artikel die Lötstellen der Akkuverbindung bemängelt. Bei unserem Tali sind die Lötstellen zwar besser, bei anderen Nutzern sind sie aber genau so schlecht wie die, die Hansi bemängelte.
Vielleicht ist Igors Kopter deswegen abgestürzt.
Landegestell – Beine
Einige berichten darüber, dass die Endschalter der Servos in den Beinen abbrechen. Matt aus USA hat dazu auf das Metalllteil, das im Servo wandert und die Endschalter drückt, weiche Gummis geklebt.
Dass die Beine bei ziemlich unsanften Landungen brechen liegt daran, dass der Kopter im Endeffekt etwas zu schwer für diese Beine ist. Andererseits absorbieren sie ja die Energie und lassen den Kopter deswegen weniger von der schlechten Landung spüren. Etwas mehr Crashresistenz wäre aber auch hier gut.
Firmware Gas Durchsacker
Wenn man zwischen dem manuellen Modus und GPS schaltet, verändert sich die Gaskurve. Der Kopter könnte, je nach Akkuladung, etwas absacken.
Der Durchsacker ist eigentlich eine ganz normale Sache. Im manuellen Modus steuert man die Motoren proportional und wenn der Akku leer ist, muss man eben mehr gas geben. Im GPS Modus ist 50% immer Schweben. Das heißt, dass es immer besser ist, beim Umschalten von GPS auf Manuell bereits im GPS etwas Gas zu geben.
Im Update 1.2 hat Walkera angeblich die Gaskurve für den manuellen Modus angepasst. Mal sehen.
Strategie von Walkera
Erinnern wir uns an alles, was Walkera bislang gemacht hat und nehmen den X350 als Beispiel.
Beim X350 haben sie wirklich nachgebessert. Bei der ersten Version (nicht „Pro”) war das Problem mit den ESC Kabeln genau so wie jetzt beim Tali noch gegeben. Jetzt, beim „Pro”, wackeln Kabel sich nicht mehr ab und werden nicht mehr gequetscht und alle anderen Kleinigkeiten, die beim X350 noch problematisch waren, sind beim Pro jetzt beseitigt.
Da ich Walkera lange beobachte, kann ich sagen: Die bringen einfach Modelle auf den Markt, schauen, wie sie ankommen, und wenn eins besonders gut ankommt, verbessern sie es auf ihre Walkera-Weise (siehe unten). Wenn nicht, wird es wieder eingestampft und weiter probiert. So scheint die Firmenstrategie zu sein.
Sie wollen immer schnell sein und testen nicht all zu lange.
Bei den Helis war es ja genau so. Wenn eins besonders gut ging, wurde „V2”, „S” gemacht, oder wie sie immer alle hießen. Bei den 200ern war es eine ganze Saga.
Die verbessern aber nicht das bestehende Modell, sondern bringen einfach ein Neues. In aller Regel passen dann aber die Ersatzteile von dem neuen auch auf das alte und man kann leicht upgraden. In das Gehäuse vom X350 Pro passt der alte X350 ja auch. Bei den kleinen Helis war es damals ähnlich.
Genau so wird es vermutlich auch mit dem Tali sein. Ers wird vielleict Tali H500 Pro kommen. Aber auch jetzt wissen wir schon, dass der neue Scout X4 die selben Motoren und den selben Akku verwendet, nur mit dem neuen Deckel.
Walkera ist Lego, und das ist für dich als Tüftler eigentlich gar nicht so schlecht.
Ja, das ist wirklich blöd, dass die ihre Strategie, die bei kleinen Helis und Koptern bis 300 € Ok war, jetzt auch bei teuren Koptern (die sie früher nicht hatten) anwenden. Gut, die haben einfach keine andere Strategie, deswegen wenden sie die einzige an, die sie haben.
Aber wie gesagt, der X350 Pro, Devo Sender und einige anderen Sachen von Walkera sind wirklich zuverlässig und die anderen werden es sicher auch.
Fazit
Tali H500 ist im Moment ein sehr schön aussehender Kopter, den wir noch nie höher als 10 m geflogen sind. Und das aus gutem Grund.
Vermutlich wird Walkera die Kabel nachbessern und einige anderen Schwachstellen auch.
Ich muss auch sagen, dass bei einigen Nutzern der Tali perfekt funktioniert!
Im Moment bin ich dabei, den Tali weiter zu reparieren und die Kabel ordentlich zu verlöten. Vielleicht fliegt er dann mal wieder. Aber zu optimistisch bin ich nicht.
Video-Link: https://www.youtube.com/watch?v=VR9UEErZtPU
Dieses Nachtflugvideo, in dem ich aus gegebenem Anlass in maximaler Bodennähe fliege, ist entstanden, nachdem die Stifte im Gehäuse repariert wurden und zwei von sechs Motoren umgelötet wurden. Der linke arm hat sich wieder so frei vibriert, dass wieder dieses komische Vibrations-Geräusch kam. Und der rechte, noch nicht umgelötete Motor, hat gelahmt.
Also wieder an die Arbeit. Alles umlöten, kleben, wuchten. Und irgendwie müssen die Arme verstärkt werden. Und wenn es dann nicht geht, wird es ein Ersatzteillager für den Scout X4.
Der heutige Stand der Dinge, vor allem seit der Ankündigung von Scout X4, sieht so aus, dass ich denjenigen, die noch kein Tali haben, empfehlen kann, auf X4 zu warten. Der wird mit großer Wahrscheinlichkeit besser. Die Kabel sind schon verbessert worden.
Und alle Tali Besitzer sollten die Schwachstellen im Auge behalten und vorsichtig fliegen.
Hallo Sergei.
Danke erst mal für den Bericht. Das mit den Pins kleben. Du musst zu erst etwas Kleber in den abgebrochenen Pin geben, dann den zurecht geschnittenen Stift von der Bruchstelle aus rein schieben. Dann in das Loch (Pin) am Gehäuse Kleber einfüllen und denn abgebrochenen Pin mit Stift einsetzen. So kommt der Kleber Überfall hin. Und dann hab ich mir das Gehäuse vom Tali noch mal angesehen. Es gibt bei einigen Pins die Möglichkeit sie mit Epoxyt zu verstärken. Dadurch halten sie etwas besser als nur mit Sekundenkleber.
Ich werde wahrscheinlich einige Pins an der „Wurzel” verstärken.
Das sind so meine Gedanken nach deinem Bericht.
Aber vieleicht fällt mir noch was besseres ein.
Lutz
Nachdem einige der mir im Video geklebten Pins beim zweiten Crash nochmal abgefallen sind, habe ich sie genau so verklebt wie du es sagst!
Ach ja, eigentlich wollte ich ja nur ein Bisschen herumfliegen und nicht so viel basteln. Aber basteln ist auch schön.
Danke für den Bericht…
„Ich muss auch sagen, dass bei einigen Nutzern der Tali perfekt funktioniert!”
Stimmt! Bisher hatte ich keine Probleme und bin auch schon höher als 10m geflogen 😉 Die Motorkabel habe ich allerdings vorsichtshalber auch mit Heißkleber gesichert. Die Lötstellen waren OK.
Im Trailer sind alle Luftaufnahmen „first take” und mit dem Tali und der iLook+ aufgenommen worden. Bei Gefallen darf natürlich gerne bei Youtube auf „Like” geklickt werden 😉
http://youtu.be/0tf6AsCQYrI
Menno…ist doch Sch.….!
Aber du bleibst trozdem cool und machst weiter…Super! 😉
Toi,toi,toi!
Walkera-Fans sind ehrlich. So mag ich das.
Nachdem ich einige Probleme vom QR, Tali und Co. grob kenne,
bin ich dann doch froh meine Kopter selber aufzubauen = Fehlerquellen minimieren.
Ungewuchtete Props kommen bei mir schon lange nicht mehr zum Einsatz!
Selbst schweineteure Foxtech-Props habe ich nochmal gewuchtet.
Motoren brauche ich nicht mehr wuchten seitdem ich die Navigator-Reihe von
Tiger-Motor verwende. Kontrolliert habe ich sie natürlich alle vor dem Erstflug.
Bisher hatte ich nur einen Crash wegen Technikfehler (alle anderen waren Flugfehler). DEN habe ich aber selber provoziert: EZFW bzw. die Servos brauchen 5V und die habe ich direkt von der FC (Naza) bezogen. Fatal: ein Servo „hing” wohl und hat die FC Strom-mäßig „ausgesaugt”. Seit ich ein 5V-BEC dafür verwende ist das nie wieder passiert, selbst wenn ein Servo mal gehangen hat.
RTF ist ja schön und gut, habe selbst mit einem MX400 angefangen, danach kam Phantom, doch ein RTF-Kopter MUSS aus der Kiste fliegen und nicht bei der 1. oder 3. Akkuladung vom Himmel fallen (Flugfehler ausgeschlossen!).
Was bin ich froh das das 3‑Achsgimbal G‑3D) für GoPro oder iLook von Walkera so gut funktioniert, an DEM Teil habe ich nicht wirklich viel zu meckern.
Gruß Mav
auweia, da habe sie dir ja eine rechte Zitrone geliefert. Schade dass der vermutlich mehr Zeit im Bastelkeller verbringt als in der Luft :(. Leider bestätigt dieser Bericht meine aktuell sehr negative Meinung über Walkera 🙁
Die Ursachen für auf freier Strecke brechende Kupfer-Adern sind Anritzungen der Ader beim Abkratzen des Isolierlackes mit einem ungeeigneten Werkzeug, der Fehler ist seit ca 100 Jahren bekannt und scheinbar der chinesischen Industriespionage entgangen.
C‑Rate der Akkus: Wenn ich bei meinem QRX350 (FW 1.32) die Ströme messe, dann habe ich auf dem Teststand bei ca 60 %-Gas um die 12 – 14 A. Da könnte man auf die Idee kommen, dass ein 2200mAh-Akku mit 20 C doch reichlich Reserve haben könnte. Im realen Betrieb machen die nach ca 6 min Flug schlapp und laden dann teilweise nur 1400 – mAh nach. Ich habe mir ein Halter gebastelt um einen 3S3000 mAh 15C akku unter den Bauch des Copters zu schnallen. Mit dem Akku habe ich Flugzeiten um 11 min bis zur LVC-Grenze und lade dann ca 2800 mAh nach.
Was soll man dazu für eine Meinung haben: Ein RTF-Kopter für 1800 Euro, der sicherheitshalber nicht höher als 10 Meter geflogen werden sollte!
@Gektor
Walkera sollte bei dem nächsten Zusammentreffen mit Dir (Spielwarenmesse Nürnberg 2015) die Testarbeit, die Du hier für die Firma ablieferst, auch mal entsprechend honorieren.
Mal so nebenbei…fals jemand Interesse hat:
Bei rc Master 1430 inkl. Versand. Full fpv Set 😉
zu „nige Nutzer berichten über Akkus mit kaputten Zellen. Das kann ich nicht ganz glauben, obwohl es auch schon sein kann. Ich vermute, dass manche falsch messen.”
da liegst du leider falsch.…… teilweise wenigstens. wenn sich ne einzelne zelle aufbläht, nützt messn nichts mehr. und das nach 2 ladungen.…..
und zum messen: bei einem akku war ein balancerkabel an der lötstelle weg, da tut man sich mit messen auch schwer.…..
dagegen schienen bei den von uns verwendeten akkus die lötstellen ok zu sein. wird wohl verschiedene chargen geben.
zu den landefüßen: können defekt werden, wenn man die am boden under belastung einziehen will, versehentlich. also nur in der luft ohne widerstand einklappen.
vg.
Einige Anmerkungen zum Thema:
Ich habe das Silikon vorsichtig nur rein mechanisch mit einem Zahnstocher aus Holz und einer spitzen Pinzette entfernt. Dann das alte Lot mit Entlötlitze entfernt, zuviel Wärmeeinwirkung ist zu vermeiden, denn in unmittelbarer Nähe liegen die parallelen Pins der FET’s. Lupe benutzen und überprüfen das keine Lötbrücke entstanden ist (Lötpad ist nur sehr dünn von umliegender Leiterfläche abgegrenzt. Bei mir lagen auch schon überall winzige Zinnkügelchen von den chinesischen Lötarbeiten auf den dünnen Trennlinien.
Kupferlackdraht (nicht Klingeldraht 🙂 ) mechanisch entlacken, es gibt dafür extra Abisolierzangen mit winzigenn Zähnchen, extreme Wärmeeinwirkung mit dem Feuerzeug birgt die Gefahr die Orinalisolation (kein Silikon) zum Nachbardraht durch Wärmeleitung zu zerstören – Kurzschluss, sofort oder später…
Akku sollte vor jedem Testflug grundsätzlich voll geladen sein, egal was die LED-Striche anzeigen…an einem guten Ladegerät voll ist voll, auch immer alle Einzelzellenspannungen, zum Schluss mal anschauen..Ok, aufgebläht ist nicht so prickelnd.
Im Flug unter Last sollte die LED-Anzeige schon eine Reservekontrolle sein, vorausgesetzt die Kalibrierung stimmt einigermassen. Kann ja mal jemand überprüfen der seinen Akku gerade offen hat, Akku drinnen trennen und externe Spannung über regelbares Netzteil einspeisen und dabei beobachten, welche Spannung wieviel LED’s entspricht.