Jeder Walkera Kopter hat einen Sensor, der die Akkuspannung misst. Der Spannungswert wird per Telemetrie auf den Sender übertragen und für die Failsafe Funktionen genutzt. Der Spannungssensor arbeitet analog mit Wiederständen und manchmal sind die Werte nicht ganz korrekt. Das lässt sich aber leicht kalibrieren.
Inhalt
Akku Sensor Kalibrieren mit APMPlanner 2
- Spannung des Akkus messen
Hierzu den Akku mit dem Ladekabel verbinden, einschalten und mit einem Multimeter die Leerlaufspannung (in Volt) an dem Stecker des Ladekabels vorsichtig messen - Kopter mit APMPlanner 2 verbinden
- Sender (Devo) unbedingt binden
- Akku einsetzen und einschalten. Motoren piepsen
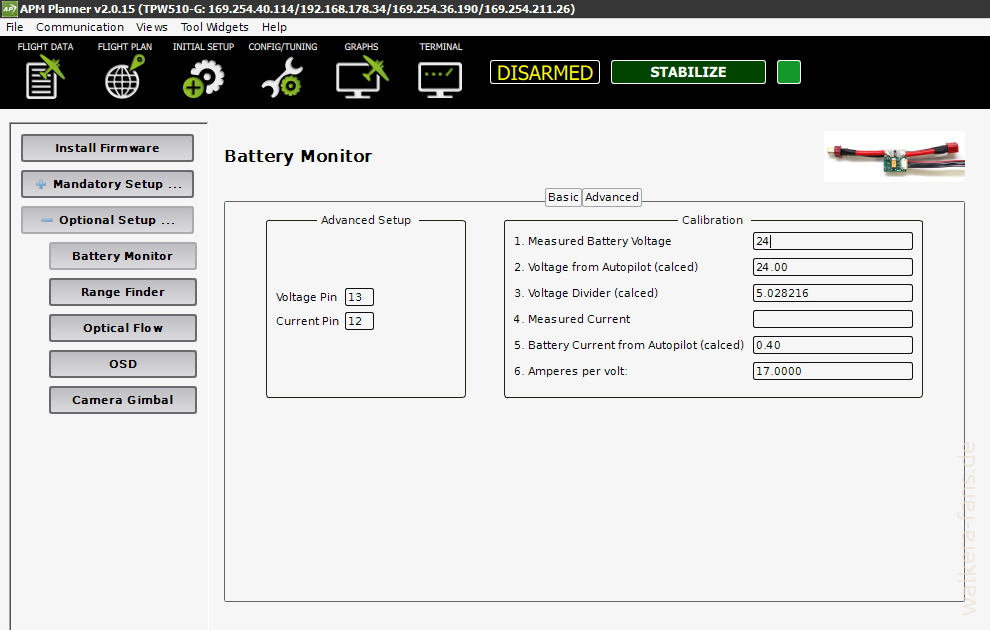
- Im APMPlanner 2 auf Intital Setup – Optional Setup – Battery Monitor – Advanced gehen
- Dort sieht man:
- 1. Gemessene Spannung
Hier trägt man das ein, wie viel Volt man am Akku kurz vorher selber gemessen hat - 2. Berechnete Spannung
Das ist der Wert, was der Kopter über Telemetrie ausgibt und intern für Failsafe etc. nutzt - 3. Der Divider
Der Wert, der zur Berechnung der Spannung herangezogen wird - etc. (unwichtig)
- 1. Gemessene Spannung
- Man trägt die Spannung, die man an dem Akku gemessen hat im Feld Nr. 1 ein und der Divider wird ausgehend davon automatisch berechnet. Fertig
So sieht es im APMPlanner 2 aus:
Akku Sensor Kalibrieren mit Mission Planner
- Spannung des Akkus messen
Hierzu den Akku mit dem Ladekabel verbinden, einschalten und mit einem Multimeter die Leerlaufspannung (in Volt) an dem Stecker des Ladekabels vorsichtig messen - Kopter mit Mission Planner verbinden
- Sender (Devo) unbedingt binden
- Akku einsetzen und einschalten. Motoren piepsen
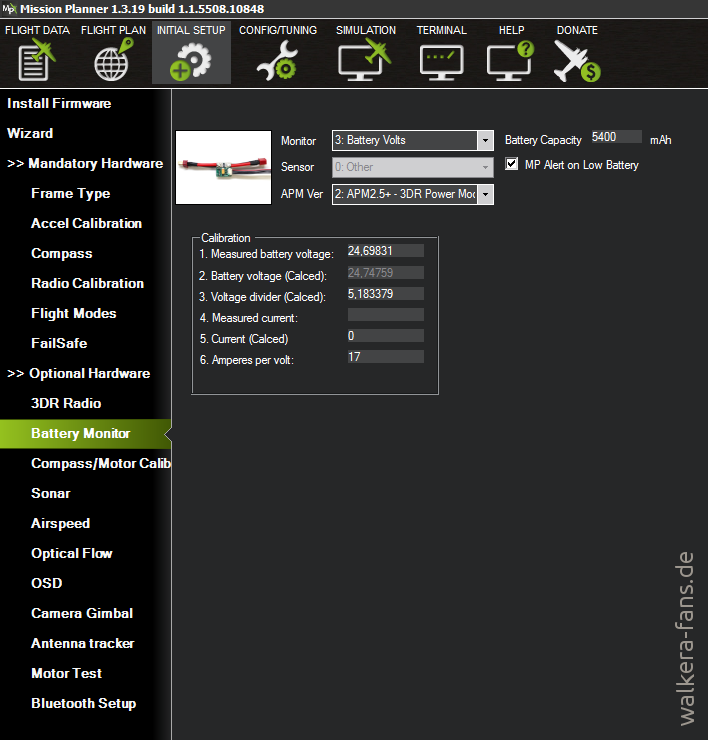
- Im Mission Planner auf Intital Setup – Optional Hardware – Battery Monitor gehen
- Dort sieht man:
- 1. Gemessene Spannung
Hier trägt man das ein, wie viel Volt man am Akku kurz vorher selber gemessen hat - 2. Berechnete Spannung
Das ist der Wert, was der Kopter über Telemetrie ausgibt und intern für Failsafe etc. nutzt - 3. Der Divider
Der Wert, der zur Berechnung der Spannung herangezogen wird - etc. (unwichtig)
- 1. Gemessene Spannung
- Man trägt die Spannung, die man an dem Akku gemessen hat im Feld Nr. 1 ein und der Divider wird ausgehend davon automatisch berechnet. Fertig
So sieht es im Mission Planner aus:
Toller Beitrag.
Und jetzt noch eine Lösung um den Strom zu messen.
Der Stromsensor ist ja oben abgebildet (Powerkabel mit Widerstand).
Aber das können die Walkera Kopter doch schon! warum soll ich nochmals einen Wiederstand einbauen?
Mein X350 Pro kann das nicht. Ich meine Strom, Ampere – nicht Spannung, Volt.
Sorry mein Fehler hab nicht richtig gelesen. Da hast du Recht!
Gleichstrom Ampere lassen sich nicht verlustfrei messen, daher sollte man da vernünftigerweise drauf verzichten. Imho gibt die Akkuspannung den Zustand des Akkus ausreichend genau wieder.