Walkera X350 Pro nutzt ArduCopter 3.2 (Stand: April 2014) als Firmware. Das bietet sehr große Möglichkeiten, was Konfiguration und Anschließen von Hardware wie zusätzlichen Sensoren oder OSD angeht. Auch autonome Flüge sind damit möglich (in Deutschland nicht erlaubt). Von den sehr umfangreichen Features ist aktuell noch sehr wenig erprobt.
In diesem Artikel seht ihr, wie man den X350 mit APM Mission Planner verbindet und konfiguriert.
Achtung! Bitte beachtet, dass diese Anleitung inoffiziell ist. Die hier erklärten Methoden sind für Experten und ambitionierte Tüftler gedacht. Wer etwas kaputt macht, darf die Einzelteile selbst behalten.
Achtung! Bitte folgendes beachten, sonst gibt es Stress und viel Arbeit:
- Wizard nicht aufrufen
- neue Firmware nicht hochladen
- Konsole nicht aufrufen
Grund: Walkera nutzt eine leicht abgewandelte Version der AdruCopter Firmware. Konfigurieren geht mit APM Mission Planner, die Standard ArduCopter Firmware installieren geht hingegen nicht.
Inhalt
Einrichtung der Arbeitsumgebung
APM Planner installieren und starten
APM Planner 2 von der Ardupilot Website herunterladen und installieren. Im Moment (04.2014) ist die Version 2.0.8 aktuell.
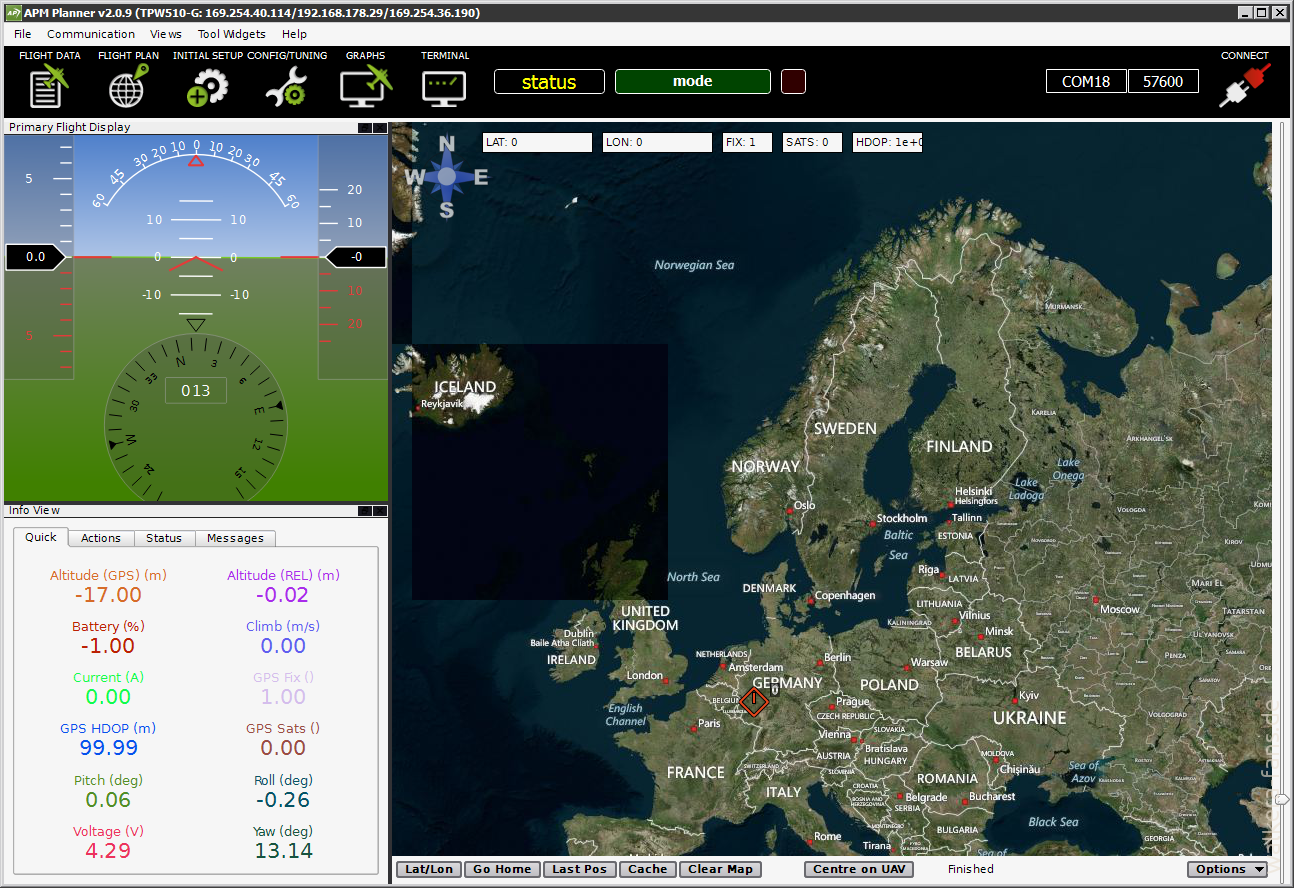
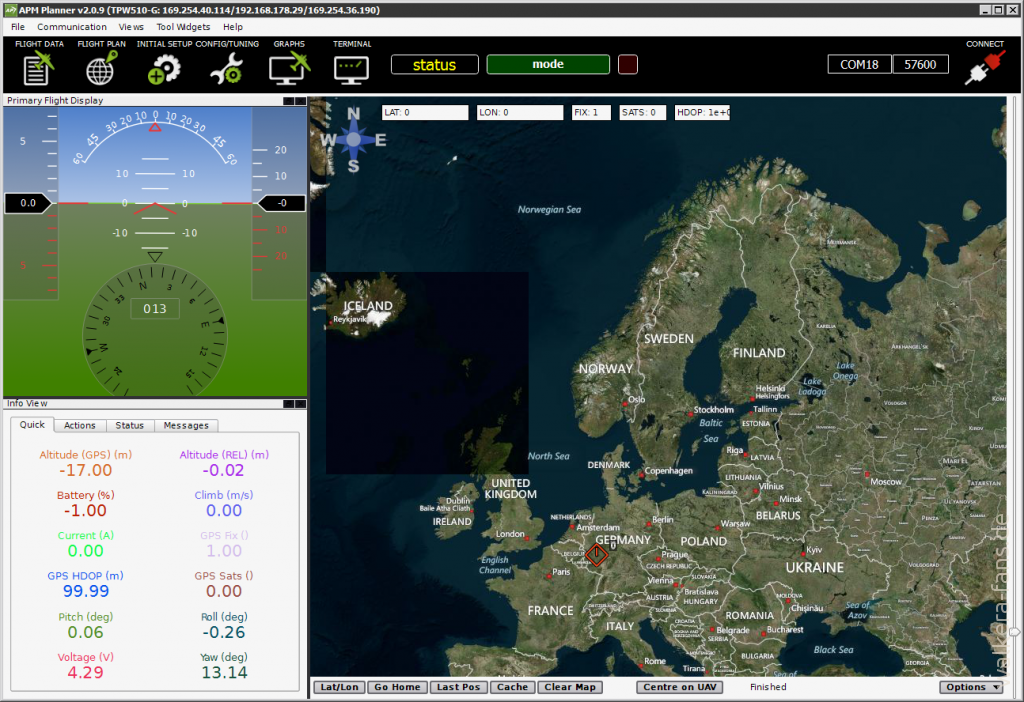
So sieht die Software nach dem Start aus:
APM Planner einstellen
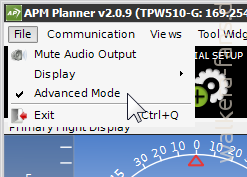
Den Erweiterten Modus (Advanced Mode) aktivieren. Das schaltet alle Einstellungen frei und ermöglicht auch, die Parameter in eine Datei zu exportieren oder diese aus einer Datei zu importieren.

X350 Pro verbinden
Die auf dem X350 Pro installierte Firmware kann nur mit der Baud Rate von 57600 angesprochen werden. Der serielle Port ist meistens COM18 (kann abweichen).
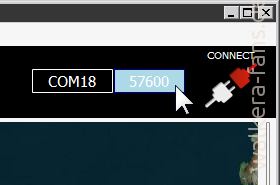
Klickt in der rechten oberen Ecke auf eins der Felder neben der Schaltfläche Connect:
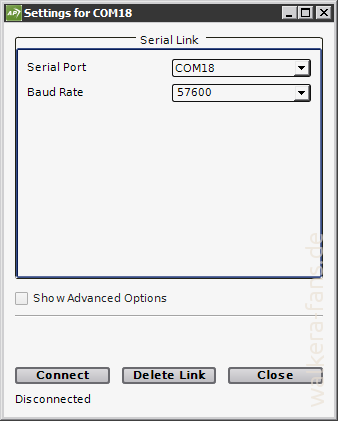
Stellt in dem daraufhin erscheinenden Menü sicher, dass der richtige serielle Port ausgewählt ist und dass die Baud Rate 57600 beträgt:
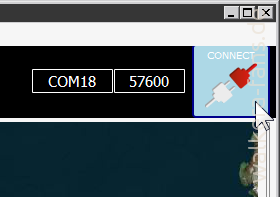
Klickt anschließend in diesem Fenster auf Connect. Später könnt ihr zum Verbinden die große Schaltfläche Connect oben rechts verwenden:
X350 Pro ist nun mit APM Mission Planner verbunden:
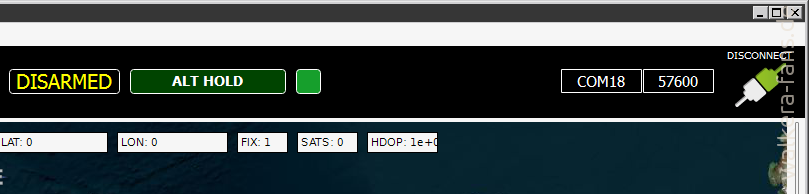
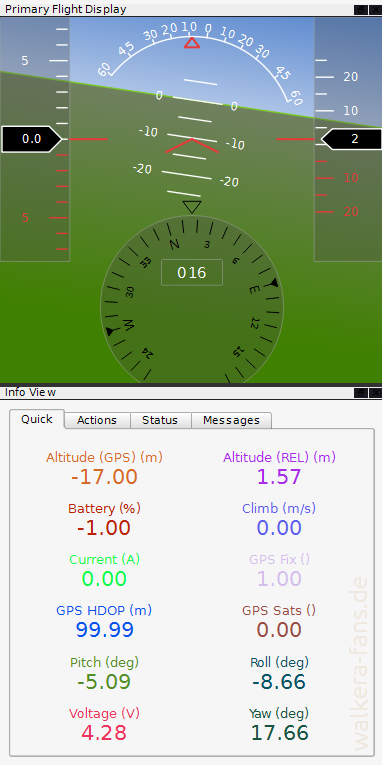
Sehr schön ist die Möglichkeit, die aktuellen Sensordaten auf dem Hauptbildschirm der Software (Flight Data) in Echtzeit auszulesen. Der künstliche Horizont funktioniert ebenfalls in Echtzeit:

Standard Einstellungen
Bevor ihr irgendetwas ändert, speichert bitte eure Standardeinstellungen.
Klickt auf den Reiter Config/Tuning:

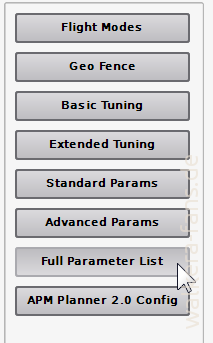
Dann auf Full Parameter List:
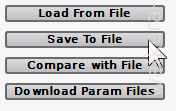
Zur Sicherheit klickt rechts auf Refresh. Alle Parameter werden von Devo‑M heruntergeladen:
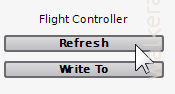
Klickt anschließend rechts auf Save to File um die Einstellungen auf dem Computer zu sichern:
Zur Not habe ich die Originaleinstellungen aus der Walkera Firmware 1.1 hier zum Download bereitgestellt:
Die (unendlichen) Möglichkeiten
Hier einige schnelle Beispiele, was ihr mit dem APM Mission Planner am X350 Pro einstellen könnt.
Flugmodi
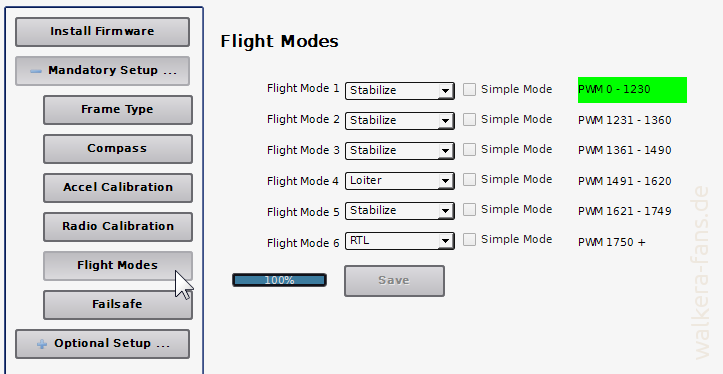
Arducopter unterstützt 6 voreinstellungen für Flugmodi, denen man 16 Flugmodi zuweisen kann. Die Einstellung erreicht ihr wenn ihr auf den Reiter Initial Setup klickt:

Klickt anschließend auf Flight Modes. Ihr seht die Standardzuweisung von Walkera. Flugmudi 1, 4 und 6 liegen auf den drei Positionen des Mix Schalters:
Failsafe
In dem unter den Flugmodi (siehe oben) befindlichem Menü Failsafe könnt ihr die LVC Voltzahl einstellen (Low Battery, in Volt) oder das LVC komplett deaktivieren. Dieses Häckchen funktioniert aber nicht zuverlässig, weshalb man das LVC durch das starke Herabsetzen der Voltzahl deaktiviert werden soll. Bitte benutzt in diesem Fall einen LiPo Warner:

Die oben gezeigten 10,7 Volt (3,5 V pro Zelle) werden im Flug, also unter Last gemessen. Wenn die Last wegfällt, hat der Akku vermutlich ca. 3,8V pro Zelle. Da kann man ruhig etwas runter gehen.
Die hohe Voltzahl ist aber nicht ganz unberechtigt. Walkera geht bei LVC bekanntlich immer auf Nummer sicher, weil zum einen die Messtechnik in den Koptern nicht genau kalibriert ist und zum anderen je nach Alter des Akkus der Spannungseinbruch früher oder später zum Tragen kommen kann. Außerdem kann der Kopter recht weit sein. Wenn der LVC schon bei 10,7 einsetzt, hat man fast bei jedem Akku noch mehr als genug Zeit um zu landen. Also ist die Originaleinstellung von Walkera durchweg berechtigt. Allerdings ist die Umsetzung des Verhaltens beim Eintreten des Battery Failsafe nicht immer optimal, weshalb eine Deaktivierung des LVC in der Regel empfohlen werden kann.
Autonomer Flug
Das RC Fliegen ist in Deutschland nur dann erlaubt, wenn man den Kopter stets im Blick hat und auch stets kontrollieren kann. Deswegen gehe ich hier zunächst nicht auf diese Möglichkeit der Firmware ein.
Dennoch möchte ich euch ein Video unseres russischen Freundes Vlad nicht vorenthalten. Er zeigt seinen 2,18 Km langen autonomen Flug mit einem X350 Pro:
Video-Link: https://www.youtube.com/watch?v=0fMO2LvQDb8
you are my hero;-)Habe meine Einstellung komplett zerschossen gehabt (unlock der Motoren lief nicht mehr). Durch die Werkseinstellungen nun alles wieder ok!
Hallo Thomas, freut mich, dass unsere Datei dir geholfen hat 😀
Hallo,
das verbinden hat geklappt,aber die aktuellen Sensordaten werden nicht
angezeigt wenn ich den Kopter bewege?
Modus ist stabilize uns grün hinterlegt.
Kann aber sein das mein USB Anschluß spinnt,hab mir schon
einen aktiven USB-Hub bestellt
Wie kann ich den dieses Fenster(Primary Flight Display) welches den künstlichen Horizont anzeigt
wieder einblenden(habs mit X geschlossen und finde es nicht mehr)
Hallo,
Zunächst einmal vielen Dank für diese schöne Seite gewidmet 🙂 europa Walkera es ist wahr, dass wir wenig Kenner. Ich komme aus der Französisch-Schweizer Raum. meine Nachricht wurde von Google übersetzt, so entschuldigen Sie mich auf Fehler.
Sie sparen mich mit der Standard-Einstellung, die Sie auf dem Laufenden! ich danke Ihnen! Ich beginne, indem Sie einige Werte in der Tuning-Set, und am Ende des Tages landete ich meine deprogrammieren qr x 350! (39 Linien wurden deprogrammiert .…. 🙁 Ich habe zum Glück Ihre Website finden!
Ich frage mich, wenn ich die Möglichkeit, die Telemetrie mit meiner Hardware zu aktivieren: QR Walkera X350 und DEVO10 …? und wenn nicht, wie?
ich danke Ihnen für Ihre Antwort
Vielen Dank auch für Sie Ihre Erfahrungen mit Walkera!
Mit freundlichen Grüßen
Michael Perrottet
drehten meine Facebook-Seite „MédiaDrone”
Super Bericht. Interessiere mich auch für den Quad. Habe nur eine Frage. Lässt sich eine TTL anschließen, sodass ich die Drohne über Handy/Tablet/Laptop steuern kann?
Hallo.…..
Zu erst ein mal ein Kompliment zu eurer Seite und ich bin froh das ich euch hier gefunden habe.
Habe da ein Problem und hoffe Ihr könnt mir weiterhelfen.….!!!!
Habe neu einen QR X350pro und dazu die DEVO 10 white.
Habe ein Update des Empfängers gemacht jedoch ausversehen die Updates des des QR X350 benutzt und nicht des Pro. Später dann doch noch die neuste Version vom QR X350pro aufgespielt, doch leider kann ich die Motoren nicht frei schalten. Bindung und Kalibrierung funktioniert, 🙁
Was kann ich tun??
Ich dachte es liegt vielleicht am Sender.…
Beim versuch dies zu beheben sind mir die Einstellungen des Senders verloren gegangen und habe sie aus versehen gelöscht. :-((
Wo bekomme ich diese Menü Einstellungen her???
Könnt Ihr mir helfen.….wäre euch sehr dankbar
Grüße aus Mallorca
Jacky
+++++++ аналогичная ситуация, теперь не могу запустить двигатели, на официальном сайте есть прошивки на все модели с config file кроме qr x350 pro.
где взять config file для qr x350 pro ???
Habe hier zwar keine Rückantwort bekommen 🙁
aber wieder alles hin bekommen dank APM Planer.
Firmware auf 1.1 zurückgesetzt und siehe da die Motoren starten wieder 🙂
Danach die neuste Firmware aufgespielt und ebenso alles ok.
Jetzt habe ich nur noch das Problem mit der Devo 10, da ich dort ebenfalls die Einstellungen zerschossen – aus versehen gelöscht habe 🙁
Da man hier die Bin Datei Devo 10 für den QR X350pro Downloaden kann , war dies fast kein Problem.….
Doch leider ist dies der Helicopter Modus und mein Gimble G‑D2 reagiert der Tilt Modus nicht, da bei Device Output die Flap Funktion fehlt.
Im Airplan Modus würde der Gimble wieder einwandfrei funktionieren und dort waren auch all meine alten Einstellungen.…..sind aber weg 🙁
Gibt es einen Weg den Giebel richtig zu aktivieren ???
oder gibt es eine andere Bin Datei für Airplan Modus!!!
Hoffe das ich diesmal eine Rückantwort bekomme.…
Grüße aus Mallorca
please, where download arducopter 3.2 firmware
Aloha,
habe gestern meinen x350 pro bekommen und irgendwann spät in der Nacht gesehen, dass mit aktuellem Planner und 1.2 Firmware das LVC von „Land” auf RTL (return to launch :O) umgestellt werden kann. Vielleicht mags ja jemand testen, ich komme da frühestens am WE zu.
Na schon getestet ???
funktioniert nicht!!!!!
Landet einfach
Nein. Momentan ergänzen sich bei mir schlechtes Wetter, viel Arbeit und eine wegen vorigem unleidliche Ehefrau zu einem komplett fluguntauglichen Umfeld
Wenn ich sowas schon lese
Ich geh nicht weiter drauf ein weil in Deutschland verboten muaha
Nur pussys und hosenkacker in der drohnenszene
Peinliches land peinliche Gesetze und gaaaanz peinliche leute
Hallo,
es wäre super, wenn Ihr etwas mehr über die Möglichkeit „Autonomer Flug” schreiben könntet, der zwar in Deutschland unzulässig, z.B. aber bei einem Auslandsurlaub recht interessant sein kann. Insbesondere interessiert mich, wie ich die Positionsdaten vom APM Planner 2.0 auf den QR X350Pro übertrage bzw. wie ich sie welchem Schalter zuordne und ob dieser Schalter aktiviert werden muss.
Gruß,
Joachim
Wozu sollten wir über etwas berichten, was eh nicht erlaubt ist und wofür wir eh keine Verwendung haben, weil wir so gern selbst fliegen? Sorry, aber ich denke, Foren (z.B. RCGroups) sind da eine bessere Adresse.
Hallo,
habe mal ne Frage zum Mission Planer. Verbinden , Parameter lesen und ändern, Wegpunkte setzen und einlesen klappt alles. Aber wie starte ich dann die Mission selbst. Ich habe ja noch das Kabel zwischen PC und dem 350 Pro. ???
Hab mir bislang noch nicht getraut auf take off zu drücken.
Liebe Grüße Lorenz
Ist ja ein geiles Forum, viele Fragen , keine Antworten ;-),
Egal , hab es selber raus gefunden, das Netzt ist ja groß und voller Informationen.
Für die , die das gleiche Problem haben:
Also man braucht einen Schalter an der Fernbedienung (ist bei mir ne DEVO 7), mit welchem man, oder auch Frau, den Fligtmodus „Auto” einschalten kann. Dazu musste ich etwas in der Funke um- und einstellen. Hat auch ne weile gedauert, bis ich das hinbekommen habe.
Im Mission Planner die Mission auf den 350 Pro, über USB Kabel, laden. und alles wieder disconecten.
Draußen auf dem Flugfeld:
1. Verbindung zwischen Funke und UFO herstellen,
2. Warten bis genügend Satelliten gefunden wurden(Rechte LED Blink-Takt 3 – 4 mal)
3. Motoren entsperren,
4.Schalter an der Funke auf „Auto” stellen
5. Gashebel betätigen, und in der Stellung lassen.
6. und ab gehter der Peter.
Ja Rückantwort ist hier leider Mangel.…..schade eigentlich.
Mein Problem habe ich auch selbständig aufheben können.
Danke Für deinen Bericht und sehr interessant.
Wo konntest du dies erforschen – Webseite??
Grüße aus der Ferne.
@Jackmann
Naja ich such es mir halt mit geschickten Google Vokabeln zusammen. Mal auf deutsch mal auf englisch.
Im Kopterforum findet man auch ganz gute Infos.
@ All
Leider habe ich immer noch ein Problem.
Die Mission ist im Pro drin . Satelliten werden schnell und ausreichend gefunden. Ich starte im Automode. Drone fliegt perfekt und landet zuverlässig an der Home Position. Ich starte noch mal den gleiche Mission OHNE was zu ändern. Drone fliegt und bleibt aber bei einem der Wegpunkte hängen und fliegt im Kreis. Und das war‚s dann. Sie kommt nicht weiter, auch nach 5 Minuten nicht. Kreist bei gleicher Höhe.
Ich kann sie weder manuell noch mit RTL zurückholen. Sie reagiert NUR noch auf „throttle Down”. Also laufe ich hin und hole sie langsam runter.
Anschliessend hilft nur noch ein neues Binding mit der Funke. Dann fliegt , je nach „Glück” die Drone wieder die gleiche Mission komplett durch, oder auch nicht.
Vielleicht kann wer helfen???
LG Lorenzo.
„Wizard nicht aufrufen
neue Firmware nicht hochladen
Konsole nicht aufrufen”
Was passiert denn, wenn ich Wizard aufrufe??
und welche Firmware wir dann hochgeladen, die vom 350Pro (von 1.1. auf 1.5??? ) oder wird die ArduCopter Firware 3.2 geändert?
Ich habs nämlich aus versehen getan und nun weiß ich nicht genau was ich tun muss um es rückgängig zumachen.
Die Firmware 1.1 vom 350Pro wieder draufschieben ist kein Problem, aber muss ich, falls das überhaupt geht, die ArduCopter Firmware auch wieder auf 3.2 ändern?????? oder ist das mit dem Kopter Firmware 1.1 dann gleich mit erledigt????
MfG
Wizard nicht aufrufen
neue Firmware nicht hochladen
Konsole nicht aufrufen
Frag mal im Forum (http://walkerafans-forum.de/), ob jemand die Antwort weiß. Ich weiß sie im moment leider nicht.
Wundert mich das das geklappt haben soll!
Ich hab das mal gemacht und weder der Wizard noch das Update wollten mit dem Pro, soweit ich erinnere sagte es: falsche Hardware.
Ruf doch mal mit dem Serial Angel Tool für den QR Die Version der Firmware auf, dann weist du es genau.
funktioniert auch mit QR x350 Basis (nicht pro)??