Stellt bitte eure Fragen in unserem Forum. Wir bemühen uns, soweit die Zeit es zulässt, darauf Antworten zu finden und diese hier zu veröffentlichen.
Inhalt
Neueste FAQ Einträge
- Wie kann ich bei der Devo 7 die Trimmung deaktivieren?
- Was ist OneShot125?
- Welchen Akku Akku soll ich für meinen Walkera Kopter kaufen?
- Die Kamera hat eine Auflösung von 800TVL. Was bedeutet das?
- Wie heißen die Stecker, die in vielen aktuellen Walkera Modellen im Inneren und bei der iLook verwendet werden (Kompass, GPS, etc.)?
- Mein Motor hat Vibrationen. Was kann ich tun?
X350 Pro
Wozu ist der Stromanschluss, der aus meinem X350 (Pro) rauskommt und wie viel Volt trägt er?
Am X350 ist es der rote JST BEC Anschluss, am X350 Pro ein kleiner weißer Stecker.
Dieser Anschluss führt 12V, die direkt vom Akku ohne jegliche Wandlung kommen.
Er ist für ein Brushless Gimbal und / oder FPV Equipment bestimmt.
Welche Ersatzmotoren kann man für X350 Pro verwenden?
Bislang wurden Emax MT2213-935KV im Forum erprobt und für gut befunden.
Sollte man beim Walkera QR X350 Pro und anderen den Kompass vor jedem Flug in derselben Region kalibrieren?
Kurze Antwort: Nein.
Das Häufige Kalibrieren ist nicht nur nervig: Es kann sogar problematisch sein. Wenn die Kalibrierung aus irgendeinem Grund schief läuft, ist sie vielleicht schlechter als die Vorherige. Die Genauigkait von Kalibrierungsdaten kann sehr verschieden sein.
Auch der Hersteller empfiehlt, nur dann zu kalibrieren, wenn man seine Position um mehrere Hundert Kilometer ändert. Die magnetische Deklination ist für diese Empfehlung verantwortlich.
Wenn man bauliche Veränderungen vorgenommen hat oder der Kopter im GPS Modus komisch fliegt, sollte man eine Kompasskalibrierung wagen. Ansonsten ist es eher kontraproduktiv und nervig.
Ich kalibriere meine Walkeras (und auch DJIs, MultiWiis, etc.) einmal ordentlich und dann nie wieder. Vielleicht nach Software Updates oder wenn ich in einem weit entfernten Gebiet fliege (über 300 km weit weg von der letzten Stelle).
Dieser Ratschlag gilt für alle Kopter mit GPS.
Die neueren Walkera Kopter (ab 2014) arbeiten mit der Arducopter Firmware. Diese kalibriert den Kompass während des GPS Fluges auf Basis der GPS Daten. Diese Feinkalibrierung zerstört man, wenn man manuell kalibriert.
Die automatische Korrektur greift recht schnell. Vor allem wenn man den Kopter nicht bloß auf der Stelle schweben lässt, sondern etwas im GPS Modus in verschiedene Richtungen geradeaus fliegt.
Man merkt eigentlich recht schnell, wenn der Kompass völlig falsch kalibriert ist oder eine sonstige grobe Fehlfunktion zeigt. Der Kopter fängt an im GPS Modus abzuhauen. Entweder fängt er sich aufgrund der automatischen Kalibrierung wieder, oder man schaltet wieder in den manuellen Modus und muss am Boden kalibrieren.
Kann ich 9 Zoll Karbonpropeller von DJI Phantom 1 für X350 Pro mit FPV und G‑2D verwenden?
Die Originalpropeller des X350 Pro haben einen Durchmesser von 9 Zoll.
Die Verwendung der 9,4 Zoll Karbonpropellern, die als Tuning für das DJI Phantom 1 verkauft werden, ist am X350 Pro nicht empfohlen.
Die großen Karbonpropeller, die auf das Phantom 1 passen, funktionieren mit den Standard Gain Werten des X350 Pro nicht gut zusammen. Der Kopter fliegt instabil.
Genau so grenzwertig ist die Verwendung der Original Plastikpropeller des Vorgängermodells X350 (diese Haben die Größe von 8 Zoll) am voll bepacktem X350 Pro. Ein X350 Pro ohne Zuladung fliegt mit den 8 Zoll Propellern des Vorgängers allerdings stabil.
Was ist der Unterschied zwischen den RX-703 und RX-703A Empfängern für X350 Pro? Kann ich RX-703 mit Devo F7 nutzen?
RX-703 ist ein 10-Kanal Empfänger und ist z.B. für Devo 10 geeignet. Die Kanäle AUX 3, 4 und AUX 5 werden nach Außen geleitet um z.B. das G‑2D Gimbal zu steuern.
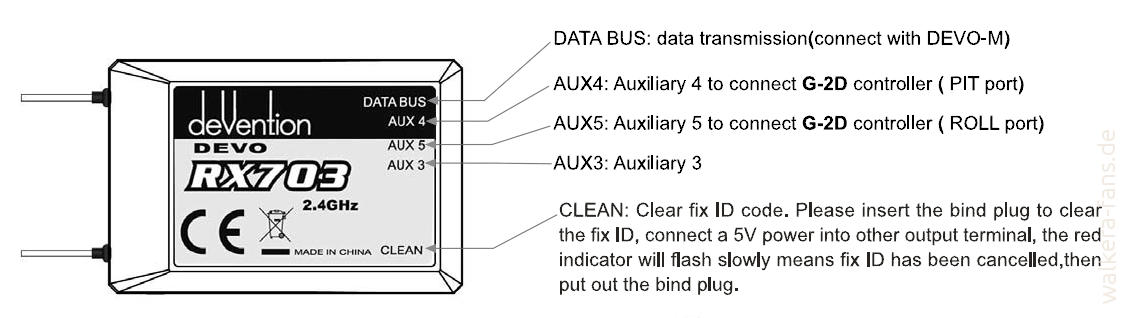


RX-703 funktioniert zwar grundsätzlich mit Devo F7 und der Kopter fliegt damit gut, es werden aber nur die ersten sieben Kanäle angesteuert. AUX 3, 4 und 5 kann man mit Devo F7 nicht ansprechen. Somit kann man G‑2D damit nicht ansteuern.
Devo 8 könnte z.B. den achten Kanal AUX 8 ansteuern und passt daher bedingt zum RX703. Für G‑2D braucht man so wie so nur einen Kanal für die Nick-Achse.
RX-703A ist ein 7‑Kanal Empfnger. Man kann AUX2 nach Außen leiten und damit z.B. die Nick-Achse des G‑2D Gimbal steuern. Der Empfänger RX-703A ist für Devo F7 geeigneter.
Siehe auch: Wie sind die Standard Kanäle bei Walkera Devo Sendern verteilt?
Kann man die Kompass Position ändern?
Grundsätzlich hat Walkera in ihrer Firmware für die Flugsteuerung (Devo M) nicht vorgesehen das die Position des Kompassmodules geändert wird.
Aufgrund der Metallanteile im Kopter und auch der elektromagnetischen Felder des Systems ist die Positionierug des Kompasses an einem Kopter nicht einfach egal und muss im Zweifelsfall durch etliche Tests erflogen werden.
Die Arducopter Software bietet aber eigentlich die Möglichkeit auch den OFFset des Kompassmodules durch Kalibration automatisch zu erkennen, bei Walkera muss man den Kopter und die Funke binden und den APM oder Mission Planner starten. Im innitial Setup kann dann unter Kompass auch eine Kalibrierung vorgenommen werden und auchder Offset wird neu erkannt und in den Parametern gespeichert.
Daher scheint es auch möglich die Kompassposition am QR X350, Scout und Tali zu verändern.
Wie heißen die Stecker, die in vielen aktuellen Walkera Modellen im Inneren und bei der iLook verwendet werden (Kompass, GPS, etc.)?
Bei den neueren Walkera Modellen (2014 und spätere) kommen Stecker mit Sicherungsklemme zum Einsatz.
Die Steckverbinder heißen JST GH, Raster 1,25mm, 4‑polig (GHR-04V‑S).
Dazu passen JST Crimpverbinder der Serie SSHL (SSHL-002T-P0.2).
Wie konfiguriere ich meinen X350 Pro und andere Walkera Modelle?
Man kann den APM Mission Planner nutzen.
Wie schließe ich den Empfänger RX703A für den Betrieb mit einem Gimbal an X350 Pro an?
Walkera hat ein Dokument veröffentlicht, in dem die Belegung des RX 703A und die Konfiguration des Senders beschrieben ist (Englisch):
Keine Antwort gefunden? Frage Walkerafans!
Bitte beachte, dass wir (WF1 und WF2) leider nicht immer Zeit haben, deine Anfragen persönlich zu beantworten. Stelle deine Frage deshalb am besten in unserem Forum. Dort sind viele Walkerafans unterwegs, die dir bestimmt gerne weiterhelfen.
Und teile uns auch auch mal deine Lösungen mit. Dann veröffentlichen wir sie hier.
Gibt es schon gute und neue Einstellungen für den X350pro mit Devo 8 (8S)?
Noch nicht. Wir fliegen den X350 Pro derzeit mit der mitgelieferten weißen Devo 10. Ich habe nur ein Wenig Expo auf der Gierachse eingestellt, damit die Videos sanftere Schwenks haben.
Auf http://www.deviationtx.com/ gibt es eine alternative Firmware, bei der das ohne Probleme geht. ich finde die Einstellungen auch deutlicher gegliedert als bei der Originalfirmware. Ich setzte die Firmware seit mehr als einem Jahr ein. Auch DSMx und Walkere geht zusätzlich zu devention vom Protokoll her. Meine 2801 ist bereits verkauft.
Guter Punkt! Die Firmware kennen wir, ein Artikel darüber ist in Vorbereitung. Dennoch möchte ich eine Warnung aussprechen: Gegebenenfalls könnte es in bestimmten Fällen durch diese tiefgreifende Veränderung der Software der Sendeanlage Probleme mit der Modellhaftpflichtversicherung geben. DMFV hat das betont.
Ok, das war mir nicht bekannt. Die Alternativfirmware ist allerdings so gut, dass Walkera sich ne Scheibe davon abschneiden sollte, mindestens was die Menüführung angeht, ebenso bei den modellspezifischen Einstellungen. Ich finde die Einstellmöglichkeiten erheblich transparenter als bei der original-Firmware. Leider gibt’s noch keine für die F7.… Ebenso sollten sie ihr eigenes altes Protokoll unterstützen und mehr Speicherplätze anbieten.
Ich bin gespannt auf den Artikel!
Danke!
KALIBRIERUNG – wann ausführen? beim QR X350
hallo, es gibt unterschiedliche meinungen zur kompasskalibrierung (360-grad drehungen),
die einen meinen, nur einmal, außer man fliegt viele kilometer weg an anderen plätzen, andere vor jedem flugtag auch wenn das fluggelände gleich bleibt.
ich selber kalibriere jedes mal neu.
vg. alf
Hallo liebe Walkera Fans,
Walkera infizierter bräuchte bitte dringend Infos bezüglich folgender Walkera Sender : WK2603 und Devo 7
Da ich nun auf Flugzeuge umgestiegen bin … Asche über mein Haupt …
möchte ich mir gerne eine neue Fernsteuerung kaufen.
Die mitgelieferten RTF Funken gefallen mir einfach nicht 😉
Ich liebe meinen WK 2402 Sender vom CB180Z und CB100 doch leider ist dieser mit 10mW zu schwach und Empfänger für Flugzeuge gibts dafür meines Wissens auch nicht 🙁
Bitte nicht auslachen … aber optisch am besten würde mir dann der WK2603 gefallen …
Ich weiß auch das die WK2603 Sender am aussterben bzw. beinahe ausgestorben sind aber optisch, rein vom Design, finde ich diese immer noch am schönsten.
Ausgenommen die neue „Predator Waffe” DEVO 12s – was für ein geniales Teil 🙂
Bin aber ein reiner „Sonntagsflieger” und möchte es so einfach wie möglich.
Kein Kunstflug, keine Telemetrie und kein FPV etc. – nur mit 4 Kanäle max. 6 ganz gemütlich durch die Lüfte cruisen. (Waco II REELY vom großen „C” oder meiner ART TECH J3 Piper Cub)
Da ich einige negative Berichte bezügl. Reichweite vom WK2603 aber auch über die Devo7 gelesen habe, wäre mir speziell Eure Meinung darüber sehr, sehr wichtig.
Eure Meinung ist sozusagen, welche für mich entscheidend sein wird.
Nun aber zu meinen Fragen:
Wäre es möglich mit einem WK2603 Sender in Verbidung mit z.B. einem RX-2608 Empfänger ein 1m Elektro Flugzeug bezüglich Reichweite sicher zu steuern ?
Wie weit wäre etwa die Reichweite ?
WK2603 sendet angeblich mit 100mW
RX-2608 Empfänger hätte ich dann gleich mehrere sozusagen auf Vorrat bestellt, bevor sie gänzlich vom Markt verschwunden sind 😉
*Anmerkung*
Bei meiner REELY WACO II RTF vom großen „C” wurde ein „REELY Sender” -
Modelcraft 2,4 G‑01T-VI Hand-Fernsteuerung 2.4 GHz Anzahl Kanäle: 4
mitgeliefert, welcher laut Beschreibung eine Reichweite von 450m haben soll.
Habe es jedoch noch nicht geprüft. *Anmerkung Ende*
Die Devo 7 wäre sozusagen mein Plan B
Wie groß wäre bei der Devo 7 die Reichweite ?
Habe mächtig Angst vor Kontrollverlust bezüglich Reichweite.
Vielen herzlichen Dank und auf Antwort hoffend …
Sonnige Grüße
Manfred
Hallo Liebe Gemeinde von Walkera… ( H I L F E )
bin leider neu, was die Branche Modellbau und Quadrocopoter angeht..
Habe mir den qr x350 PRo +Devo f7 mit g2 Gimbal zugelegt..
Wie es für meine Eigenschaft üblich ist, habe ich sofort nach dem auspacken erstmals an der FB rumgespielt. Mit dem Resultat, das ich wahrscheinlich einiges verstellt haben könnte.
Habe mit auf den Qr x350Pro mal die Firmwarre 1.7
http://walkera-fans.de/aktuelle-firmware-versionen-von-walkera-stand-03 – 2015/
und auf der Devo f7 die 0.6b Version drauf getan.
http://walkera-fans.de/devo-f7-firmware‑0 – 6b/
Da ich auf der FB so einiges verstellt haben könnte, dachte ich, ich lade mal die Datei, von hier, für den qr x 350 pro auf meine Devo..
„x350 Pro Devo F7.bin“
http://walkera-fans.de/downloads/
Beim Erstflug ging das Ding von ganz alleine hoch, schwebte dann über mir (so ungefähr ‚mit starkem Wind) und kam langsam wieder in meine Richtung nach unten. Zum Glück konnte ich Ihn in der Luft am Fuß packen und die Motoren abstellen. Nach einem nochmaligem Versuch bekam ich Ihn zwar hoch und er lies sich auch rechts links vorne hinten steuern, aber das Gas reagierte nicht Direkt und genau..
Bekam in aber heil runter.
Nun probiere ich Ihn dauernd am Boden zu testen. Dabei halte ich Ihn fest und teste das Gas geben um dann zu schauen, wie schnell er darauf reagiert. Habe festgestellt, dass er erst bei ca 40% Leistung anfängt zu reagieren. bei 56% steuern die Motoren kurz sehr hoch aber dann wieder etwas weniger. Mein Eindruck ist, das der Gashebel nicht Synchron mit der Reaktion vom QuadroCopter übereinstimmt. Hoffe habe mein Problem nicht zu blöd erklärt-
Meine Frage.
Was könnte ich verstellt haben?
Passt vielleicht die Firmware nicht …. ?
Gibt es nicht eine Möglichkeit die „devof7“ wieder kompl. In Werkseinstellung zu setzten.?
Bin echt am verzweifeln..
Hier ein kleines Video wie es sich verhält..
https://www.youtube.com/watch?v=MlIrl7Lh2TA
Vielleicht weiss ja jemand wa ich falsch mache…
Im Vorfeld , 100 Dank
Gruss Ralph (kuenax847)
Inforalph@web.de
H I L F E Walkera Devo 8S geht nicht fuer unbinding und binding nicht.
nicht genug mit Walkera CP Master das selbe Problem. Mit dem Devo 8s
fliege ich ohne Probleme V120 D02 und Mini CP. Ich verstehe ueberhaupt
nichts mehr. Der Devvo 8s hat alle Daten vom Cp Master und V450 D03
eingestellt.. CP Master RX 2703H‑D V450 R2703H‑D Es waee sehr nett
wenn mir jemand weiter helfen koennte. Wohne in Spanien . VLG Frank Engel
Hallo
Mir ist bei dem Binden von Devo7 und Empfänger RX701 ein Problem aufgetreten. Die Bindung hat funktioniert aber der Motor teuft bei meinem Flugzeug nur auf volle Leistung ‚wenn ich den GEAR Schalter betätige der Trottel Stick hat keine Funktion.
Ich habe einen weiteren Emfänger gebunden den RX1002 da habe ich das selbe Problem.
Muss ich das Umprogrammieren aber wie ?
Kann mir einer von den Pro´s kurz und knapp den Unterschied zwischen 250 Runner Pro und 250 Runner Advanced erklären ???
Grüße,
Sierra Lima
P.S.: Witzig, „per aspera ad astra” ist mein Whatsapp-Profil-Status 😀