Ein sehr schöner Artikel von unserem Freund Sascha (auch bekannt als walkeraflitzer). Ich finde diesen Umbau sehr sinnvoll und hoffe, dass Walkera künftig auch in anderen Modellen außer Tali H500 Telemetriefähige Empfänger verbaut.
– Gektor
Seit der Veröffentlichung des Tali H500 – und vor allem der Devo F12E – hat Walkera einen Empfänger mit eingebautem Telemetriemodul namens RX705 herausgegeben.
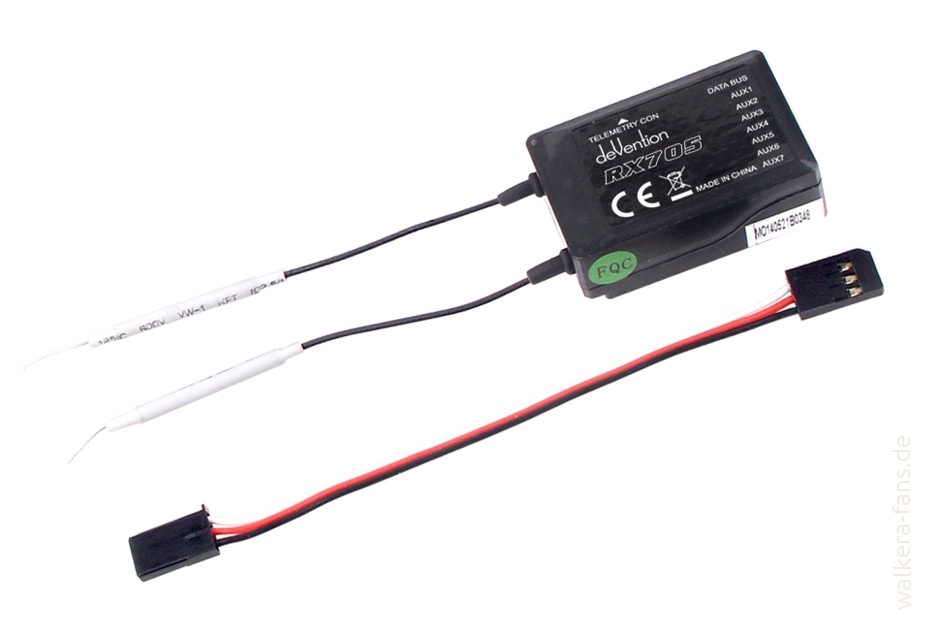
Der telemetriefähige Empfänger RX705 aus dem Tali H500 Ersatzteilsortiment
Da die die Devo‑M Flugsteuerung des X350 Pro auf dem Ardupilot Mega Board aufbaut, gab es natürlich auch andere Lösungen um die Telemetriedaten abzugreifen und zu senden. Dies hat aber mindestens ein extra Modul und erheblichen Verkabelungsaufwand bedeutet.
Der neue Sender Devo F12E bietet mit seinem großen obenliegenden Monitor eine tolle Möglichkeit, Telemetriedaten darzustellen. Das geht mittels der Funktion Sensor View im Menü Functions.



Mit dem neuen RX705 und nur einem neuen GPS Kabel aus dem Tali Signalkabel Sortiment kann man nun auch an der Devo M des X350 Pro die Daten direkt abgreifen und ohne externen Sender an die Devo F12E senden.

Tali Signalkabel, links ist das benötigte GPS Kabel
Das Kabel hat einen 6‑poligen Stecker der an das GPS Modul anstelle des alten Kabels angeschlossen werden muss, der 4‑polige Stecker mit vier verschieden farbigen Kabeln wird an der DEVO M in den GPS Port gesteckt und das von dort abgehende weiße Kabel wir mit dem RX705 verbunden. Das zusätzliche rot/schwarze Kabel wäre für den Tali Kompass und wird hier für die Telemetrie Funktion nicht benötigt.
Hier ein kurzes Video:
Video-Link: https://www.youtube.com/watch?v=C3wMkU-G9_o
Ich bin nun geflogen, es hat funktioniert!
So kann nun die Akkuspannung nicht nur abgelesen werden, sondern auch durch entsprechende Einstellung an der Devo F12E der Vibrationsalarm ausgelöst werden.
Somit ist das LVC Problem endlich aus der Welt und auch wenn wir mal die Zeit vergessen, wird uns die Funke daran erinnern, frühzeitig den Heimweg anzutreten.

Alarmeinstellung Bildschirm 1
Alarmeinstellung Bildschirm 2
Ich habe im APM den LVC Level auf 10,4 V eingestellt und den Alarm in der Devo F12E auf 10,6 V das hat sich als ausreichend herausgestellt, wenn man nicht zu weit weg fliegt. Der Alarm steigt erst langsam ein bevor er dann permanent wird.
Zu Hause hat sich herausgestellt das der Accu tatsächlich noch 10,4V (3,46 V pro Zelle) hatte und das ohne, dass zuvor das LVC den Kopter zum Landen gezwungen hatte und ich sanft und sicher landen konnte.
Natürlich kann man damit jetzt experimentieren falls man dann doch mal weiter weg will und größere Reserven braucht. Weiterhin werden die Entfernung und die Geschwindigkeit verbindlich angezeigt und auch die GPS Koordinaten!
Zum Zeitpunkt der Veröffentlichung war noch nicht klar das Walkera einen Fehler bei der GPS Höhenbestimmung bezüglich der Einstellung relativ und absolut gemacht hat. Sie haben das schlicht vertauscht. Wenn ihr also eine richtige Höhenangabe zum Abflugs Punkt haben wollt stellt die GPS Koordinatenabgabe auf absolut!
Die Temperaturen der ESC´s werden leider nicht ausgelesen.
Die tollen Verbesserungen durch das neue Paket aus Sender und Empfänger sind so herausragend, dass wir nun endlich befreit fliegen können.
Auch andere Sender des Walkera Devo Sortiments können die Telemetriedaten verarbeiten. Die schönste Anzeige davon hat aber die Devo F12E.
von Sascha @ walkeraflitzer
Ich werde diese Modifikation unbedingt machen. Gerade wenn man das LVC deaktiviert oder sehr weit runtersetzt, ist es sehr wichtig die Akkuladung stets im Auge zu behalten. Zum Abfangen des Kopters braucht man ja genügend Leistung. Wenn der Akku fast leer ist, darf man nur sehr vorsichtig fliegen.
Bislang nutze ich das einzelne Telemetriemodul von Walkera oder LiPo Warner.
Hello friends, Rx 705 walkera transmits telemetry qr x350 pro for Devo F7? Anyone who has made experience, please share. Thank you
Danke für die Beschreibung.
Habe gerade das Kabelset für den Umbau bestellt und dazu zum Testen einen Tali GPS. Werde dann Schreiben ob die Probleme beim Austausch des GPS verschwinden.…
Kennt jemand die Pinbelegung für den Telemetrieeingang am RX705?
Ich möchte gerne meinen Pixhawk anschließen…
Danke schon mal!
Hallo,
danke für die tolle Anleitung.
Ist das Problem mit der Höhe schon gelöst und können die Daten auch auf der Devo 10 Angezeigt werden?
Wird die Geschwindigkeit und die Entfernung auch übetragen bzw. berechnet?
Vielen Dank.
Gruß Meer
Hallo,
Zurzeit habe ich aber noch das Problem mit der Höhenanzeige bei „relativer“ Höhenberechnung, also bezogen auf den Abflugort.
Ist das Problem mit der Höhe schon gelöst und können die Daten auch auf der Devo F12E Angezeigt werden?
Vielen Dank.
Gruß Figueiredo
Hat schon jemand Erfahrungen mit dem Walkera Telemetrie-Modul (http://www.walkera-distribution.de/product_info.php?products_id=34960) gemacht? Ist es für den QR X350 Pro mit Devo 10 geeignet?
Das Modul ist zum Austausch im Sender, um Telemetriefähigkeit nachzurüsten.
D.h. Devo8 -> Devo8S, Devo12 ->Devo12S
Die Devo10 kann bereits Telemetrie, daher unnötig.
Das ist kein Telemetriesender, der ins Modell eingebaut wird!
Alles klar, mein Irrtum.
Habe mir den RX705 und Kabel besorgt. Leider passt der 6 polige Stecker , wie oben beschrieben nicht zu GPS des 350 da dessen Kabel auf der Platine eingelötet sind. Sollte es etwa heißen GPS des Tali ??? Was ist richtig ?
Eigenartig! ist den das GPS Modul des 350 ohne Pro anders?
Sorry, es soll heißen 350 pro. und gleich nochmal sorry, habe nun komplett das GPS abgeschraubt und siehe da, das Kabel paßt hinein. (6 polige Buchse)
Vielen Dank für die prompte Antwort.
Gruß
GüntherL
Hallo,
brauche folgende Info. Möchte den Empfänger RX705 erstmalig mit der DEVO F12E fest binden ( FIXID ). An welchen Empfängereingang des RX705 setze ich hierfür den Bind Plug?
Danke
Mir ist von anderen Walkeras bekannt daß der Plag nur zum Löschen erforderlich ist nicht zum Binden. (Handbuch der F12E eng. Seite 27 und zum löschen seite 28, mit Plug ausfühlich beschrieben.) Für den Rx705 wird es nicht anders sein. Habe den gleichen aber noch nicht eingebaut.
Vieleicht hilft es weiter
Gruß
GuntherL
Hallo und danke für die schnelle Antwort!
habe die Beschreibung DEVO F12E auch auf diesen Seiten gewissenhaft gelesen aber ich finde konkret für den Empfänger RX705 nicht den entsprechenden Port fürs Bind Plug. Kann es sein das es der letzte AUX7 Eingang ist? Ich benötige den
korrekten Port damit ich über die Menüfunktionen des Senders die nötigen Einstellungen fürs binden bzw. entbinden vornehmen kann. Wie ich bereits be-
merkt habe, hat sich bei der Erstkonfiguration der Sender automatisch mit dem
Empfänger gebunden.
Danke
Habe die Daten gefunden bei Walkera Tali H500 da ist RX705 eingebaut:
http://www.walkera.com/en/productinformation/H500+Devo%20F12E_Radio_Setting_Guide.pdf, es ist AUX7
Habe auch die Kabel für die Steuerung des Gimbal Walkere D2 wie angegeben verlegt, und nehme mal an es wäre richtig, und auch die Einstellungen für h500 wie oben in der PDF übernommen ., leider bewegt am Gimbal nichts . gibt es Erfahrung hierzu ?
Gruß
GüntherL
Hallo erstmal,..
tolle Anleitung, hört sich richtig gut an. Gibt es eine Möglichkeit Telemetriedaten auch auf der Devo F7 darzustellen?
Vielen Dank für Eure Antworten im voraus.
Gruß Williman
hi,
gehe ich richtig in der annahme, daß dieser telemetrie-empfänger NCHT für den normalen X350 geeignet ist, sondern nur für die devo_M FC?
vg. alf
Der normale X350 (ohne Pro) geht nur mit dem Telemetriemodul WK-CTL01‑D, das separat zur RX eingebaut werden kann. Es braucht nur Strom und bindet eigenständig mit dem Sender.
Die alts FS hat keinen Data Bus trotzdem kann man den RX 705 auch normal mit allen Kabeln einzeln verbinden. Die Beschriftung ist halt AUX 1 – 7
Das stimmt so nicht. Aux1‑7 sind die Kanäle 5 – 12. Die Kanäle 1 – 4 gehen nur über den Bus. Die 705 ist 12-Kanal!
Super Seite Respekt
Kann man für x350 Pro die Follow Me Funktion irgendwie nutzen?
Danke
Klasse Mod, vielen Dank. Mich interessiert dieselbe Frage wie Bernd: Ich plane meinem QR X350 pro Telemetrie beizubringen, um dann einen Follow Me Modus darauf aufzubauen.
Alternativ könnte man natürlich den gesamten Flight Controller umrüsten auf einen APM 2.6+ mit entspr. Telemetriemodul (mit großer Stabantenne).
Daher erscheint es mir ein wenig unrealistisch, dass nur durch Umbau des Empfängers auf den 705 die Telemetriedaten „dynamische GPS-Position” für ein Follow Me zuverlässig ohne weitere Antenne etc. übertragen werden sollen.
Oder ist es dann eben keine 433MHz Funkstrecke mit großer Reichweite, sondern nur die max. 2km der Std.-Verbindung zur Funkfernsteuerung?
Für Tipps der Profis wäre ich dankbar, bin Einsteiger 😉
I have installed this module with the Tali cable and have the f12e and I don’t get any telemetry. Is there some setting I’m missing. I know all about sensor view, etc. it just is not sending out any data.
I have tried different ways taking apart the quad several times to try and get this to work, still no telemetry.
Any comments?
I figured it out. QR X350 pro with upgraded software makes all telemetry, except temp, work on sensor view. Makes the Qr a even better quad. I also am using the f12e v1.5.
Hi Valkera Fans!
I have the X350 Pro – the first version – with white Devo 10
I bought the H500 cable set for the GPS and telemetry cable
Just replaced the RX 703 for RX 705
Enabled the sensor in the Devo 10 settings
When i bind the x350 and Devo10 and go to the sensor view i can see the
Voltage,RPM and GPS is „active” but only reads „0”
So i can see that the Devo10 receives some data but its only zeros no real volatge etc…when the battery is unplugged the sensor view goes to inhibit.
The x350 is currently on FW1.5, Devo software is 0.7A and library is 0.2
Anyone here that had a success??
Any ideas what i need to do in order to fix this ?
Any help will be greatly appreciated.
Greeting from UK!
BXX
Update!
Hey everyone!
I solved the problem by flashing the x350 to firmware 1.7
The telemetry numbers are correct now.
I did not like the throttle behaviour on the 1.7 as the lowest spinning RPM is way too high – almost taking off!
Downgraded to 1.5 and the telemetry data is working and throttle behaves normally.
Happy now!
Hallo Walkera-Fans,
Danke für die super site. Ich habe ein Walkera QR X350 Pro mit ein F12E und ein RX 705 dazu. Ich habe die anweisung dieses artikels gefolgt und alles scheint zu funktionieren. Aber die Spannung der Batterie scheint nicht zu ändern. Ich kan die Spannung kalibrieren in Mission Planner. Die sich ändernde Spannung wird dann am Sender angezeigt. Aber danach ändert sich die Spannung nicht mehr. Zum beispiel: Gemessen Spannung 12,4 V, nach kalibrierung auf die Sender steht auch 12,4 V. Nach fliegen die Spannung ist gemessen 11,5 V aber die Sender zeigt nog immer 12,4 V.
Hat jemand eine Idee, was das sein könnte?